






前言:该博客主要记录我在设计双腿轮足ROS机器人时的一些想法和点子
一、致谢双腿轮足机器人现有设计和开源资料
灯哥
【自制】我开发了一个通用机器人大脑!【硬核】_哔哩哔哩_bilibili
StackForce (StackForce) - Gitee.com
星空【开源啦!】无刷轮腿平衡机器人_哔哩哔哩_bilibili
https://gitee.com/skythinker/foc-wheel-legged-robot
世博同学
[自制]首款桌面级双轮腿机器人-DEMO版发布_哔哩哔哩_bilibili
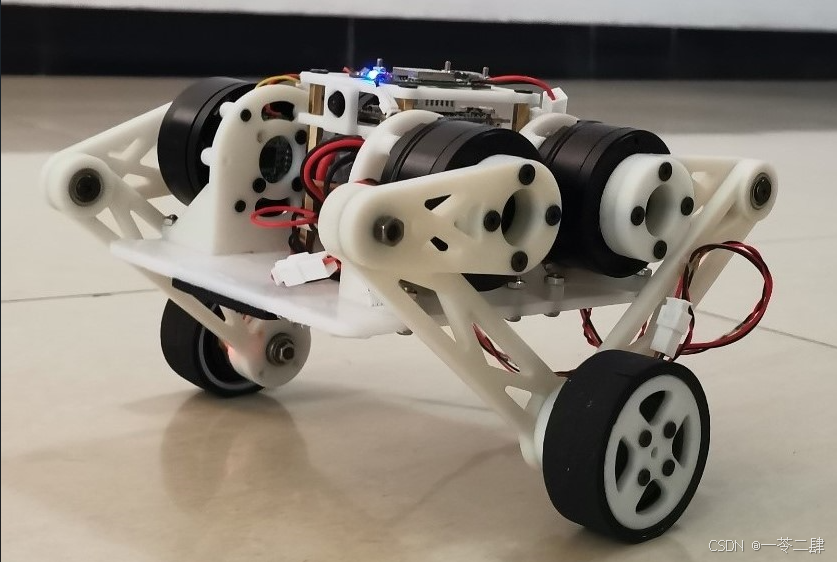
二、本人机器人设计
1.经验总结
灯哥这种需要一个轴承
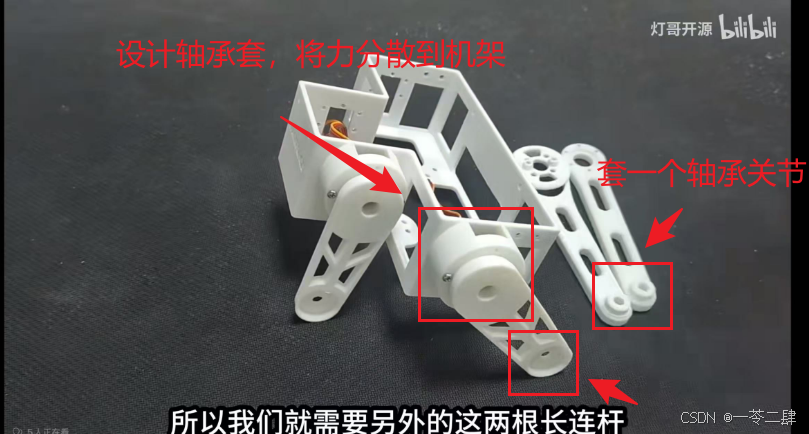
robomaster设计这种,多个直推轴承,感觉可以

灯哥机械模型整体

星空
三、无刷电机FOC和PID控制学习
四、ROS学习和实验
1.学习
这是我的学习笔记ROS学习笔记汇总,跟着“机器人工匠阿杰”的课程-CSDN博客
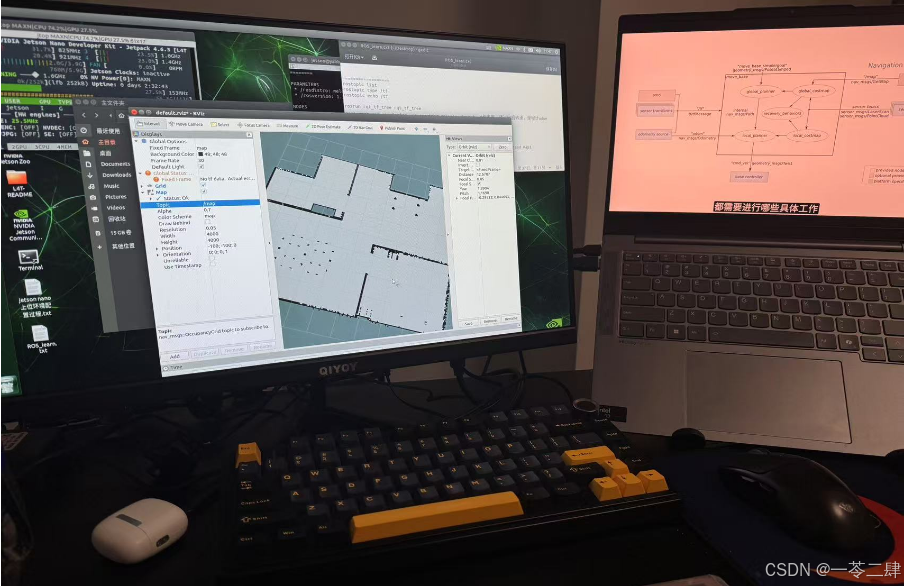
2.自制实物调试

















 387
387

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









