






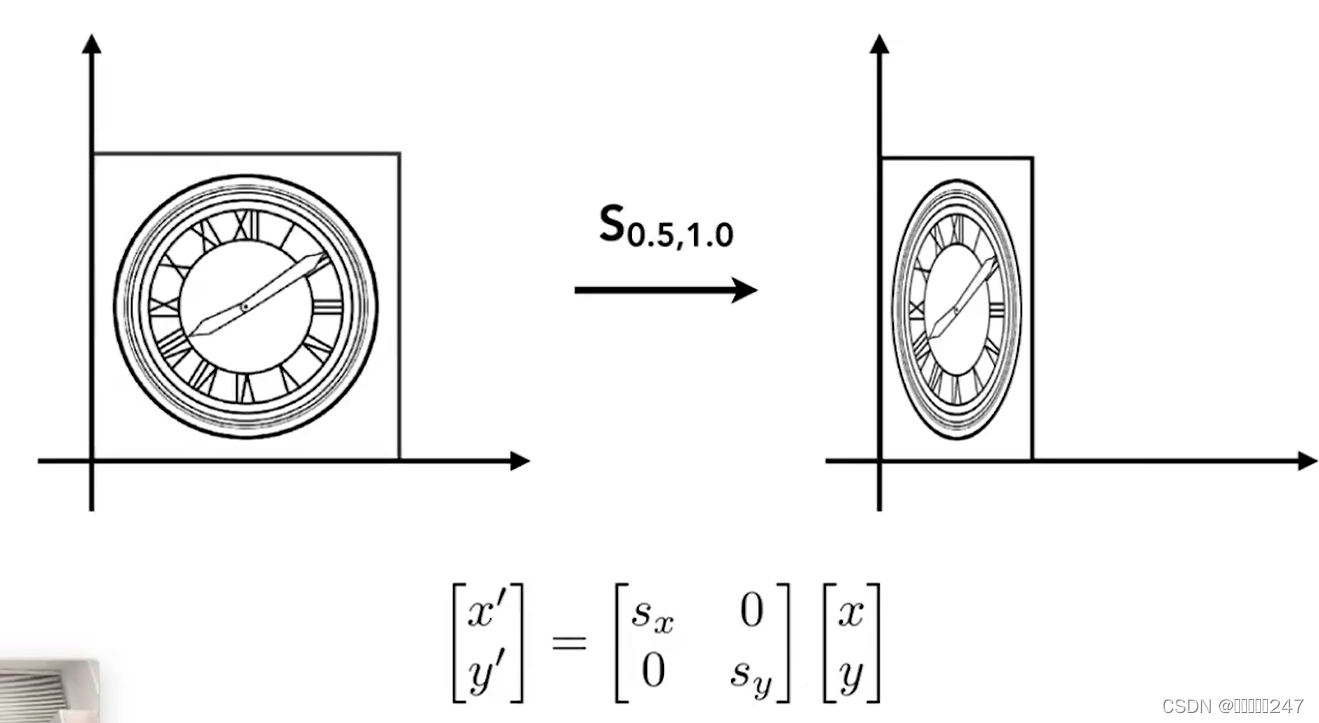
1.缩放矩阵:
其中Sx Sy 为x和y方向缩放的倍数。
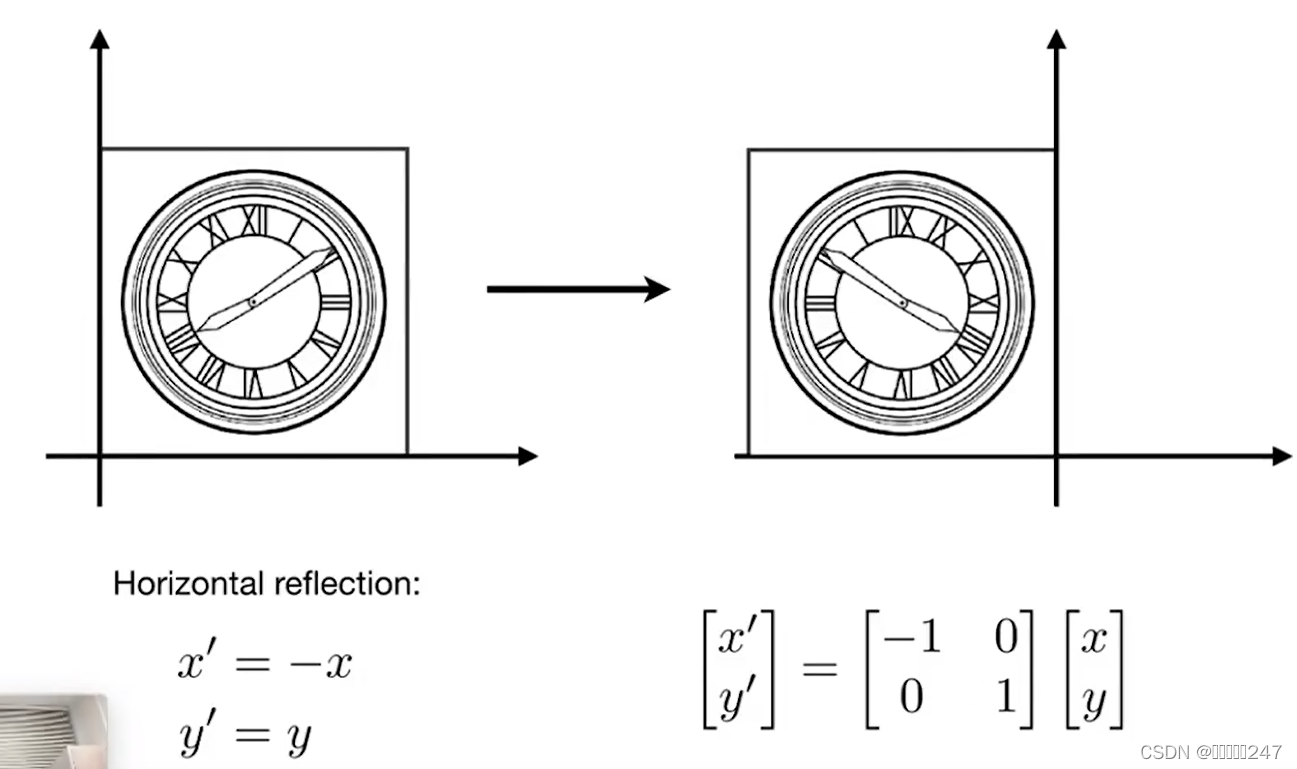
2.镜像矩阵 :
如果相对y轴镜像 我们可知的就是x相反,y相同
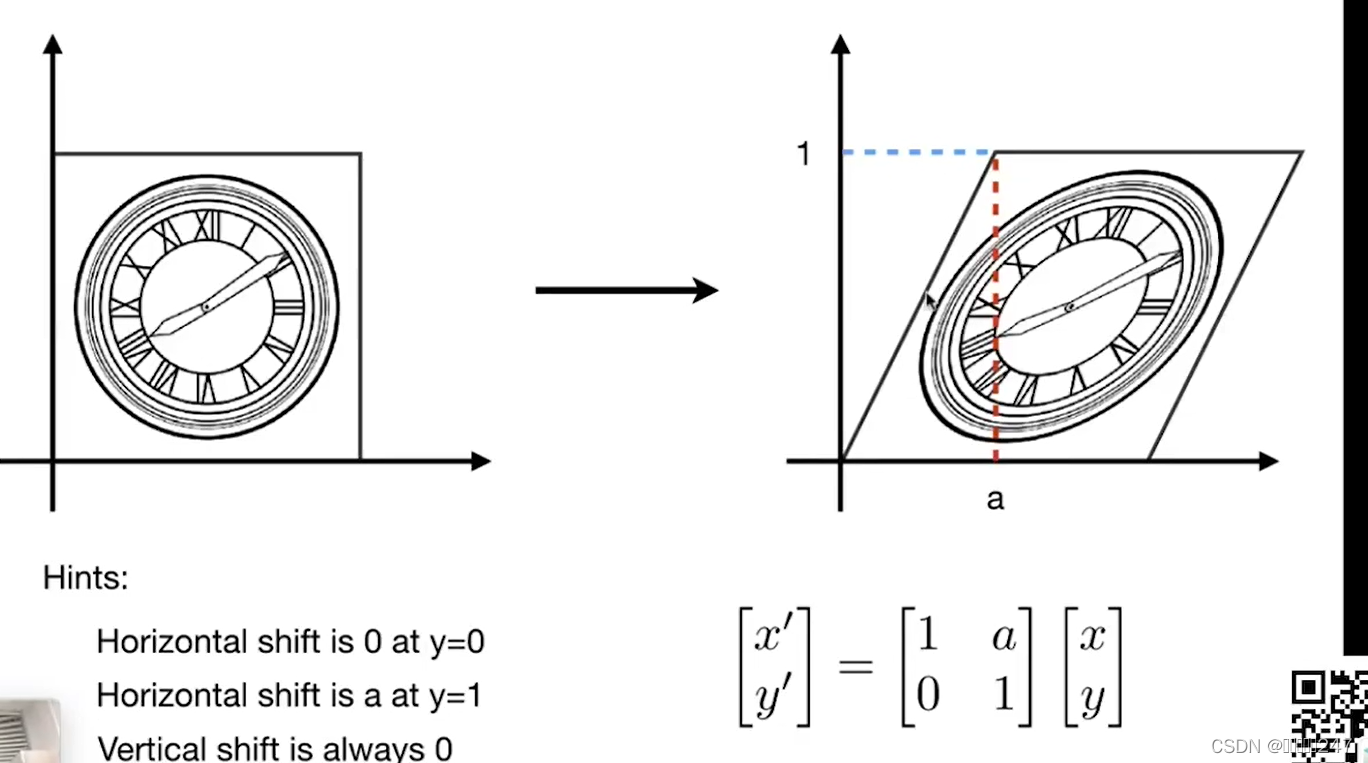
3.错切变换
其中y方向的移动为0,x方向的移动为a值乘y 也就是y最大移动的距离
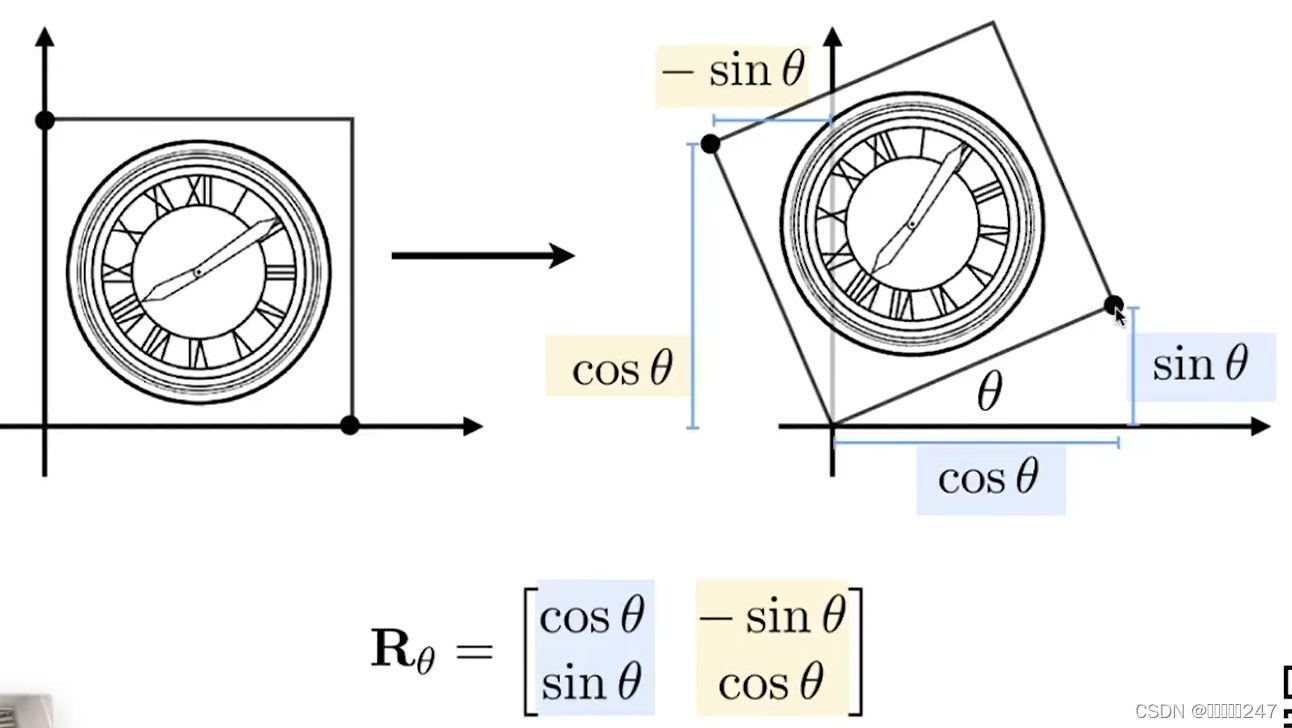
4.旋转变换(绕原点,逆时针旋转)
用两个特殊点 来将我们旋转公式中的特殊值计算出来,因为所有的点都要满足这个旋转矩阵,所以我们可以用特殊点进行推导
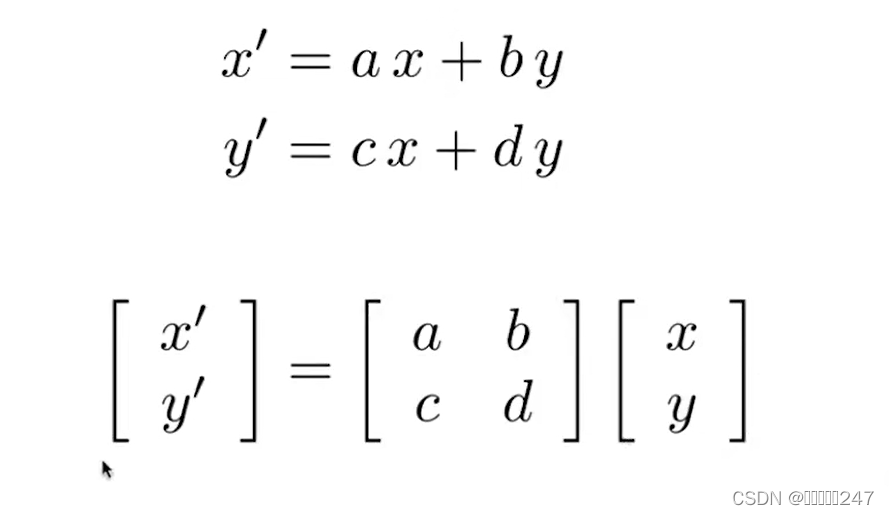
所有二维变换都可以归纳为这样子的矩阵:
为了将我们平移等一些变换 ,能够写成类似于上述的一个通用的式子,我们引入了一个新的概念,齐次坐标。
总结之后的矩阵为: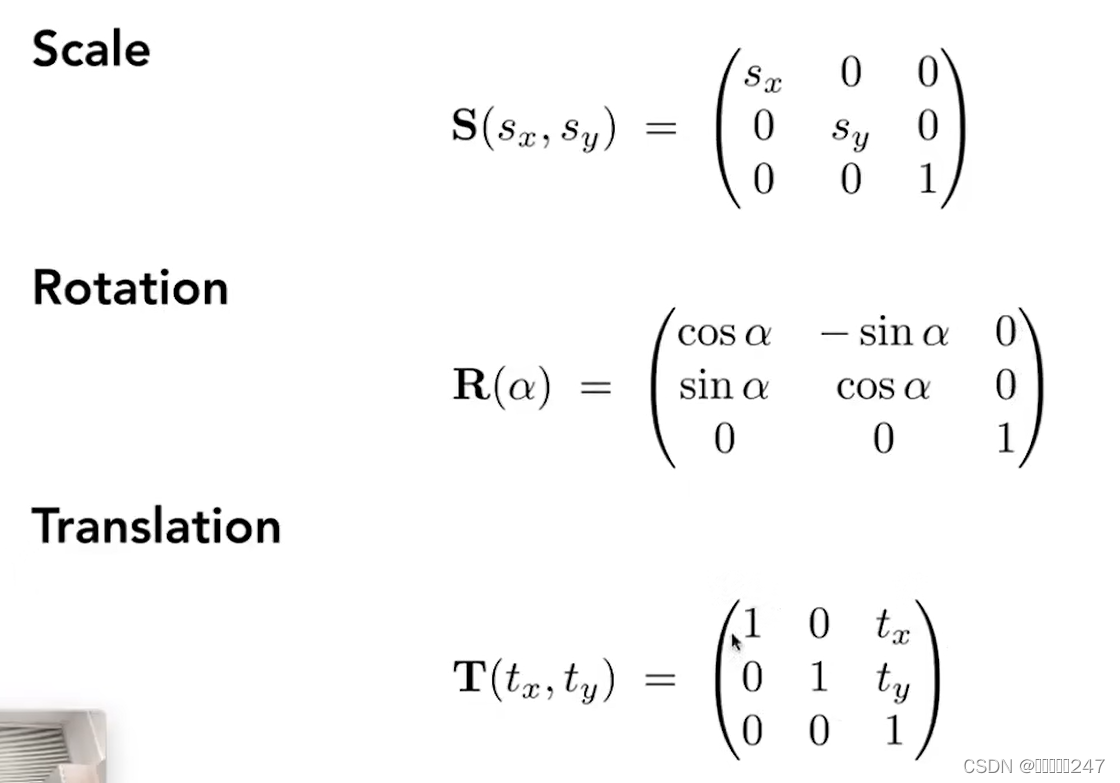















 110
110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









