






/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdlib.h>
#include "stdio.h"
#include <math.h>
#include "bsp_as5600.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
//同样USART2改为你的串口
HAL_UART_Transmit(&huart1, (uint8_t*)&ch,1,HAL_MAX_DELAY);
return ch;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//初始变量及函数定�????????????????????????
#define _constrain(amt, low, high) ((amt) < (low) ? (low) : ((amt) > (high) ? (high) : (amt)))
#define PI 3.141592
#define _3PI_2 4.71238898038f
float V=0;
float v=0;
int line=0;
char Buff[4]={0,0,0,0};
char RxBuff[100];
int PP=7,DIR=-1;
float Kp=0.133;
float Sensor_Angle=0;
int angle=0;
float motor_target=0;
float voltage_limit=12;
float voltage_power_supply=12;
float shaft_angle=0,open_loop_timestamp=0;
float zero_electric_angle=0,Ualpha,Ubeta=0,Ua=0,Ub=0,Uc=0,dc_a=0,dc_b=0,dc_c=0;
// 归一化角度到 [0,2PI]
float _normalizeAngle(float angle){
float a = fmod(angle, 2*PI); //取余运算可以用于归一化,列出特殊值例子算便知
return a >= 0 ? a : (a + 2*PI);
//三目运算符�?�格式:condition ? expr1 : expr2
//其中,condition 是要求�?�的条件表达式,如果条件成立,则返回 expr1 的�?�,否则返回 expr2 的�?��?�可以将三目运算符视�?? if-else 语句的简化形式�??
//fmod 函数的余数的符号与除数相同�?�因此,�?? angle 的�?�为负数时,余数的符号将�?? _2PI 的符号相反�?�也就是说,如果 angle 的�?�小�?? 0 �?? _2PI 的�?�为正数,则 fmod(angle, _2PI) 的余数将为负数�??
//例如,当 angle 的�?�为 -PI/2,_2PI 的�?�为 2PI 时,fmod(angle, _2PI) 将返回一个负数�?�在这种情况下,可以通过将负数的余数加上 _2PI 来将角度归一化到 [0, 2PI] 的范围内,以确保角度的�?�始终为正数�??
}
float _electricalAngle(){
return _normalizeAngle((float)(DIR * PP) * getAngle_Without_track()-zero_electric_angle);
}
// 设置PWM到控制器输出
void setPwm(float Ua, float Ub, float Uc) {
// 限制上限
Ua = _constrain(Ua, 0.0f, voltage_limit);
Ub = _constrain(Ub, 0.0f, voltage_limit);
Uc = _constrain(Uc, 0.0f, voltage_limit);
// 计算占空�??????????`
// 限制占空比从0�??????????1
dc_a = _constrain(Ua / voltage_power_supply, 0.0f , 1.0f );
dc_b = _constrain(Ub / voltage_power_supply, 0.0f , 1.0f );
dc_c = _constrain(Uc / voltage_power_supply, 0.0f , 1.0f );
//写入PWM到PWM 0 1 2 通道
// htim2.Instance->CCR2=dc_a*200;//调节占空�??????????
// htim3.Instance->CCR2=dc_b*200;//调节占空�??????????
// htim4.Instance->CCR1=dc_c*200;//调节占空�??????????
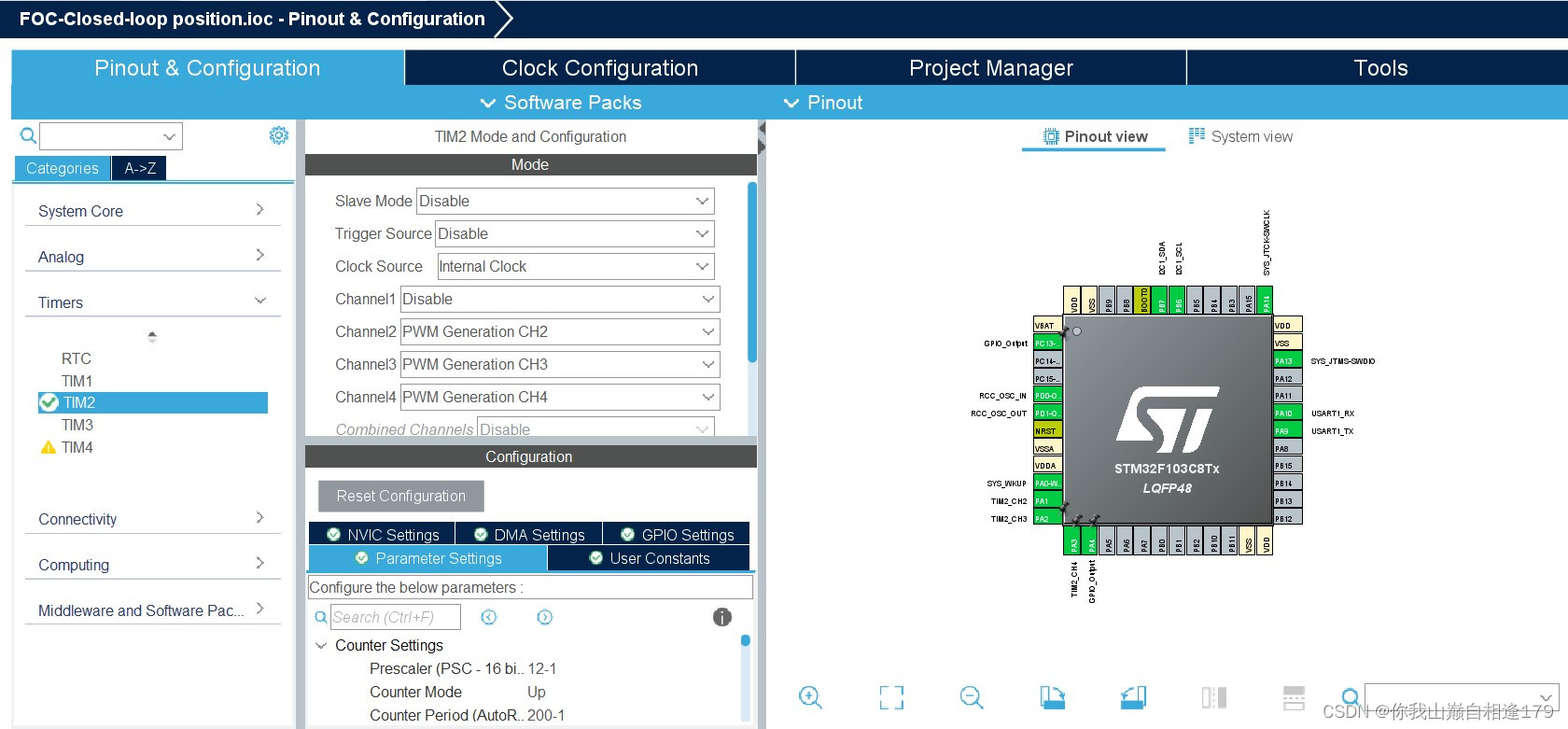
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_2,dc_a*200);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3,dc_b*200);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4,dc_c*200);
}
void setPhaseVoltage(float Uq,float Ud, float angle_el) {
angle_el = _normalizeAngle(angle_el);
// 帕克逆变�??????????
Ualpha = -Uq*sin(angle_el);
Ubeta = Uq*cos(angle_el);
// 克拉克�?�变�??????????
Ua = Ualpha + voltage_power_supply/2;
Ub = (sqrt(3)*Ubeta-Ualpha)/2 + voltage_power_supply/2;
Uc = (-Ualpha-sqrt(3)*Ubeta)/2 + voltage_power_supply/2;
setPwm(Ua,Ub,Uc);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
// HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, 0);
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
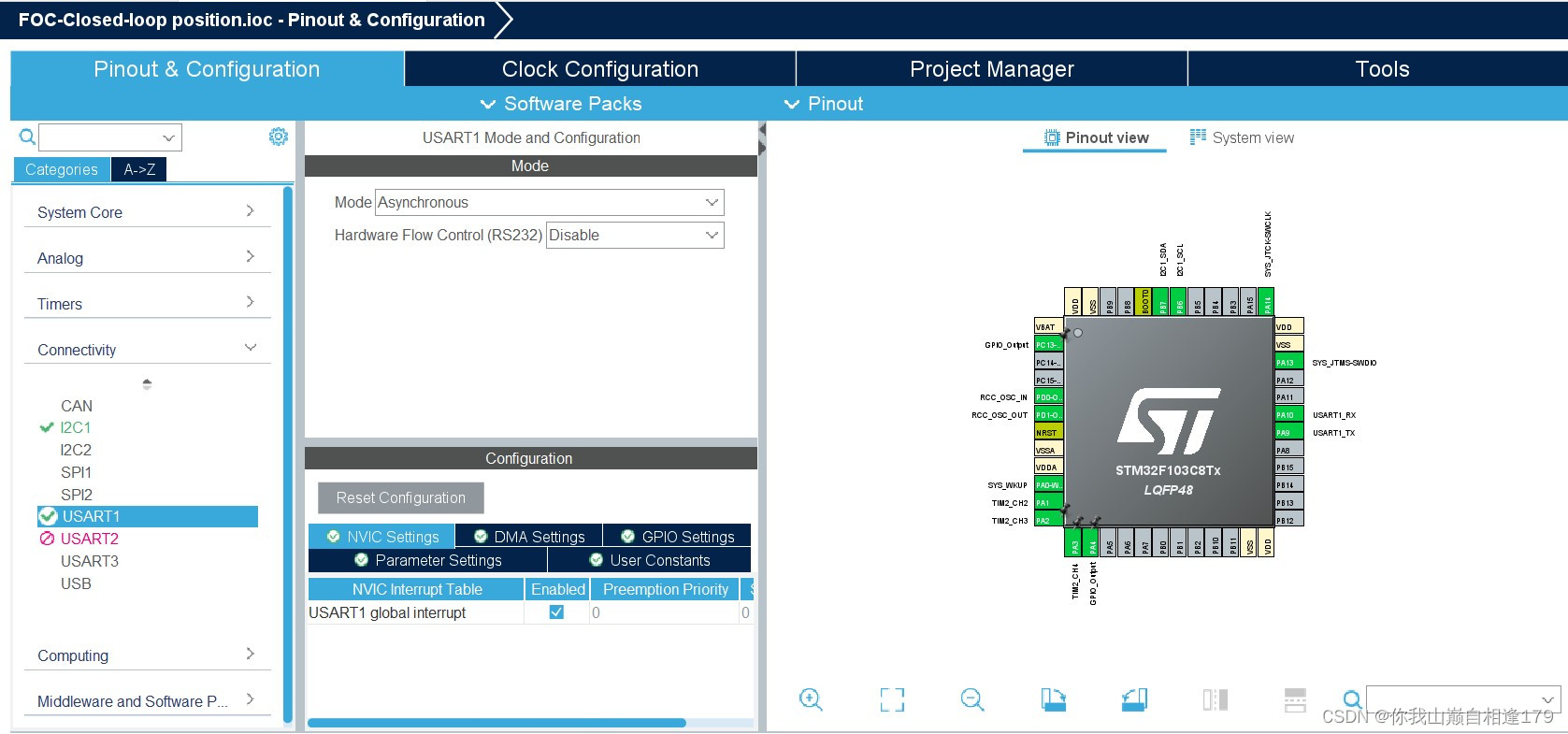
MX_USART1_UART_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, 1);
setPhaseVoltage(3, 0,_3PI_2);
HAL_Delay(3000);
zero_electric_angle=_electricalAngle();
setPhaseVoltage(0, 0,_3PI_2);
printf("0电角度:");printf("%f\n",zero_electric_angle);
HAL_UART_Receive_IT(&huart1, (char *)Buff, 1);
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// printf("%f\n",getAngle_Without_track());
angle=(int)100*bsp_as5600GetAngle();
Sensor_Angle=(float)angle/100;
printf("%f\n",Sensor_Angle);
setPhaseVoltage(_constrain(Kp*(motor_target-DIR*Sensor_Angle)*180/PI,-6,6),0,_electricalAngle());
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart1)
{
++line;
RxBuff[line-1]=Buff[0];
if(Buff[0]==0x0A || Buff[0]==0x0D)
{
float x,y,z;
if(line==5)
{
x = RxBuff[0]-'0';
y = RxBuff[2]-'0';
z = RxBuff[3]-'0';
motor_target=x+y/10+z/100;
}
if(line==4)
{
x = RxBuff[0]-'0';
y = RxBuff[2]-'0';
motor_target=x+y/10;
}
if(line==2)
{
x = RxBuff[0]-'0';
motor_target=x;
}
line=0;
}
}
Buff[0]=0;
HAL_UART_Receive_IT(&huart1, (char *)Buff, 1);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */















 804
804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









