






一.前言:
1.AirSim:深度学习时代研究无人机的利器?
AirSim 目前支持的传感器有:相机、双目相机、红外相机、雷达、距离传感器、气压计、IMU、GPS、磁力计
2.AirSim Settings
是 AirSim 本身的设置
- Defaults:默认值
- execuable:可执行(文件)
- binary:二进制
3.AirSim APIs
4.Sensors in AirSim
AirSim 中传感器的设置
5.相机配置:
注意:相机的配置与其他传感器不同,并且没有与之关联的枚举。 可以查看相机配置和API相机图像去进行相关配置:
general settings:Settings - AirSim
图像API:Image APIs - AirSim
二.传感器设置
修改 home/Documents/AirSim 里面的 settings.json 文件
AirSim 官网有一些现成的 settings 可以参考:
ROS: AirSim Tutorial Packages - AirSim
这些也在你下载的 AirSim 文件下有:
三.查看你的代码发布的某个话题
1.打开一个终端,在 AirSim/ros 路径下运行
source devel/setup.bash
roslaunch airsim_ros_pkgs airsim_node.launch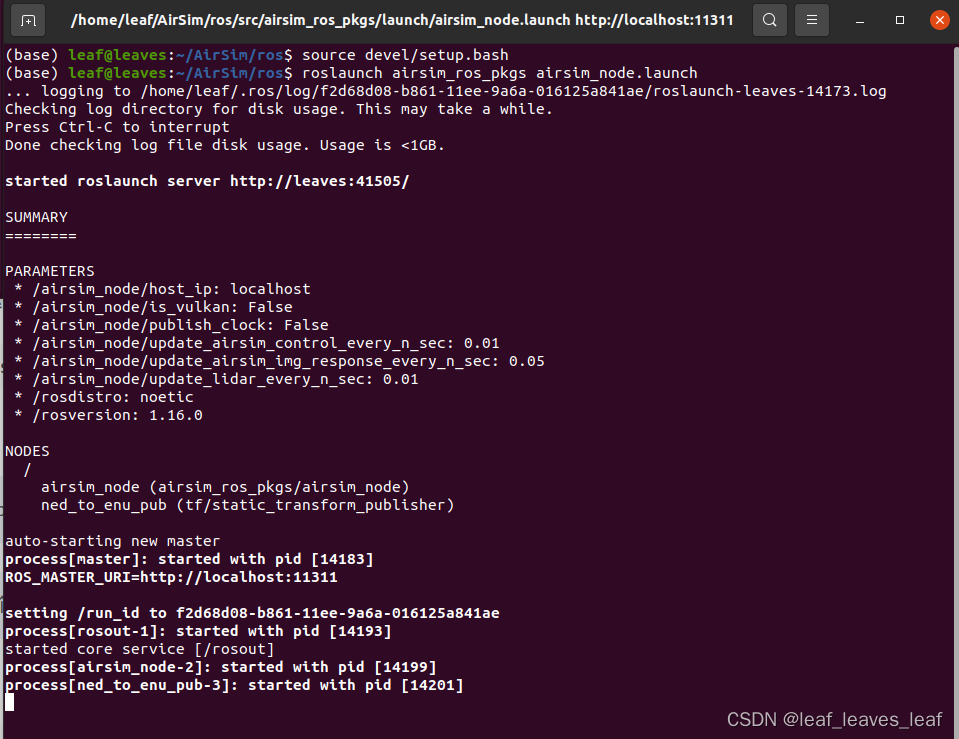
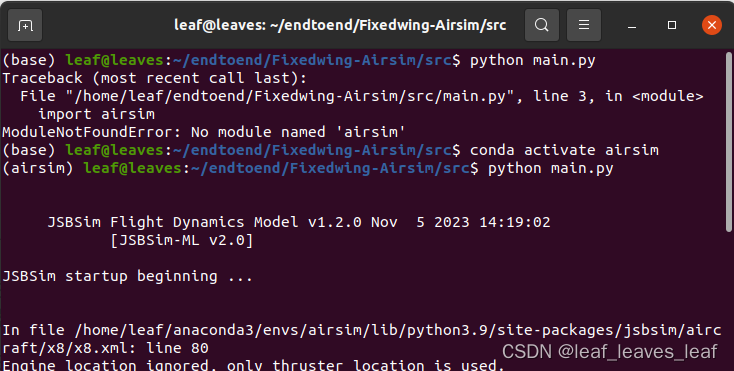
2.运行任意一个无人机运动代码
打开一个新终端
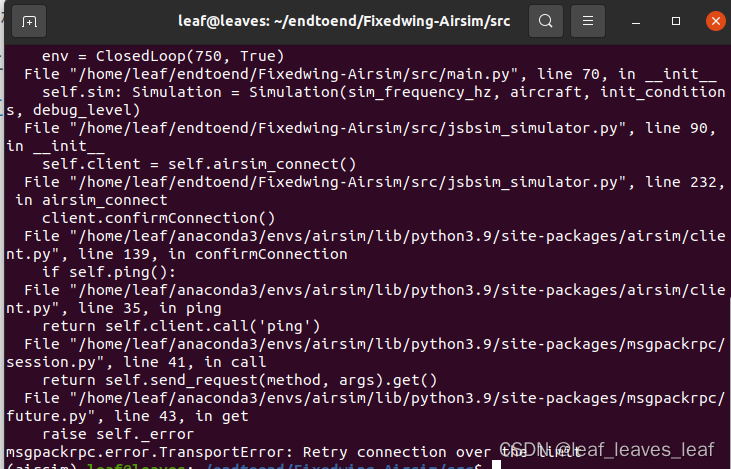
此处运行 Fixedwing 代码,也可以运行其他强化学习的代码(先打开 UE4 的某个环境才能运行的起来),否则会报错如下
运行 UE4,可以看出来,第二步修改的传感器已经加载进去了
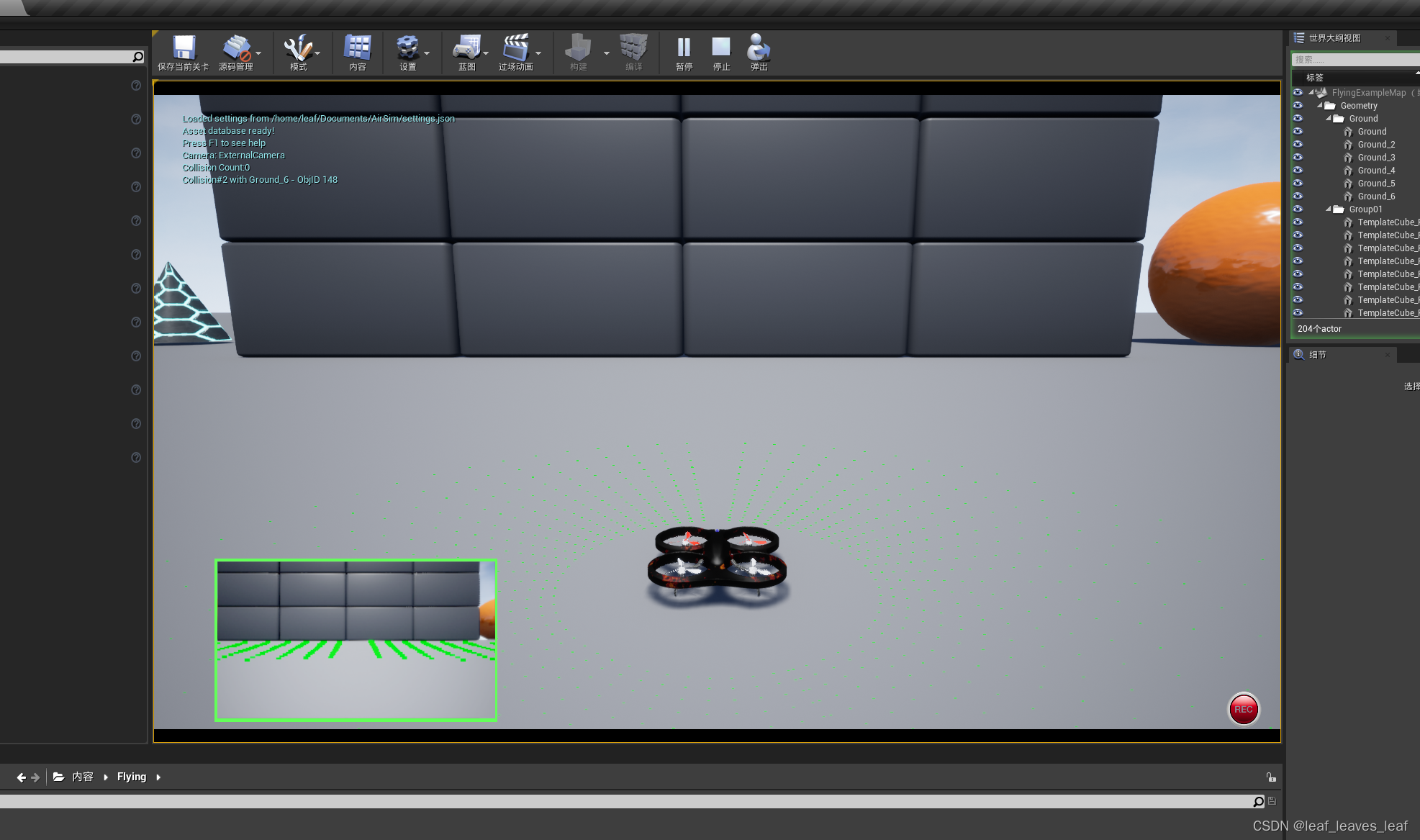
运行代码
3.查看无人机按照上一步运行的代码设置的路径飞行时发布的话题
打开一个新终端
source ~/AirSim/ros/devel/setup.bash
rostopic list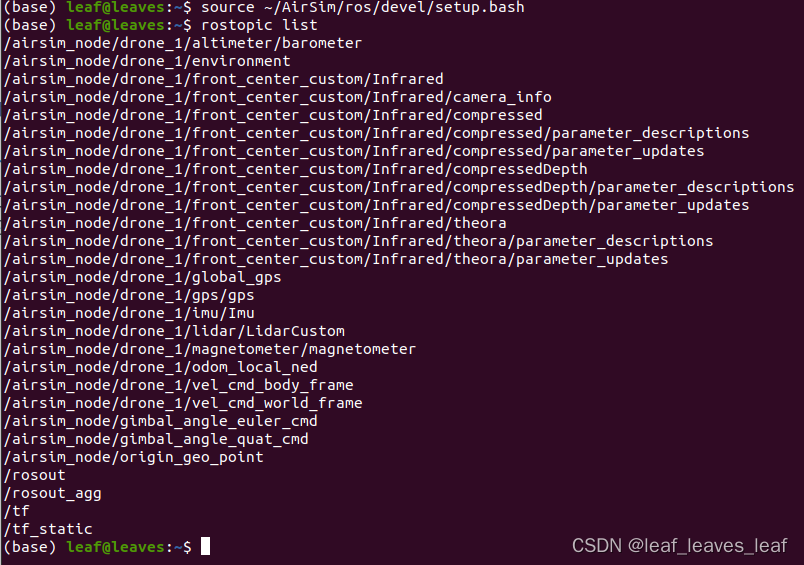
4.查看某个话题到底有没有消息数据发布出来
此处以红外相机为例
rostopic echo /airsim_node/drone_1/front_center_custom/Infrared/camera_info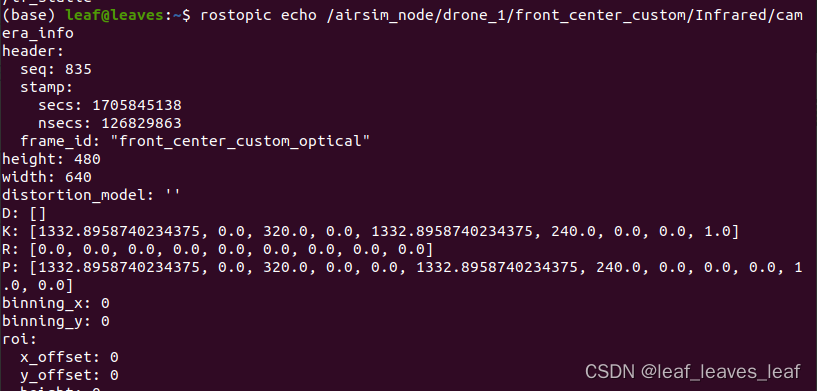
5.打开 rviz 查看
在 ~/AirSim/ros 下打开一个新终端
运行
source devel/setup.bash
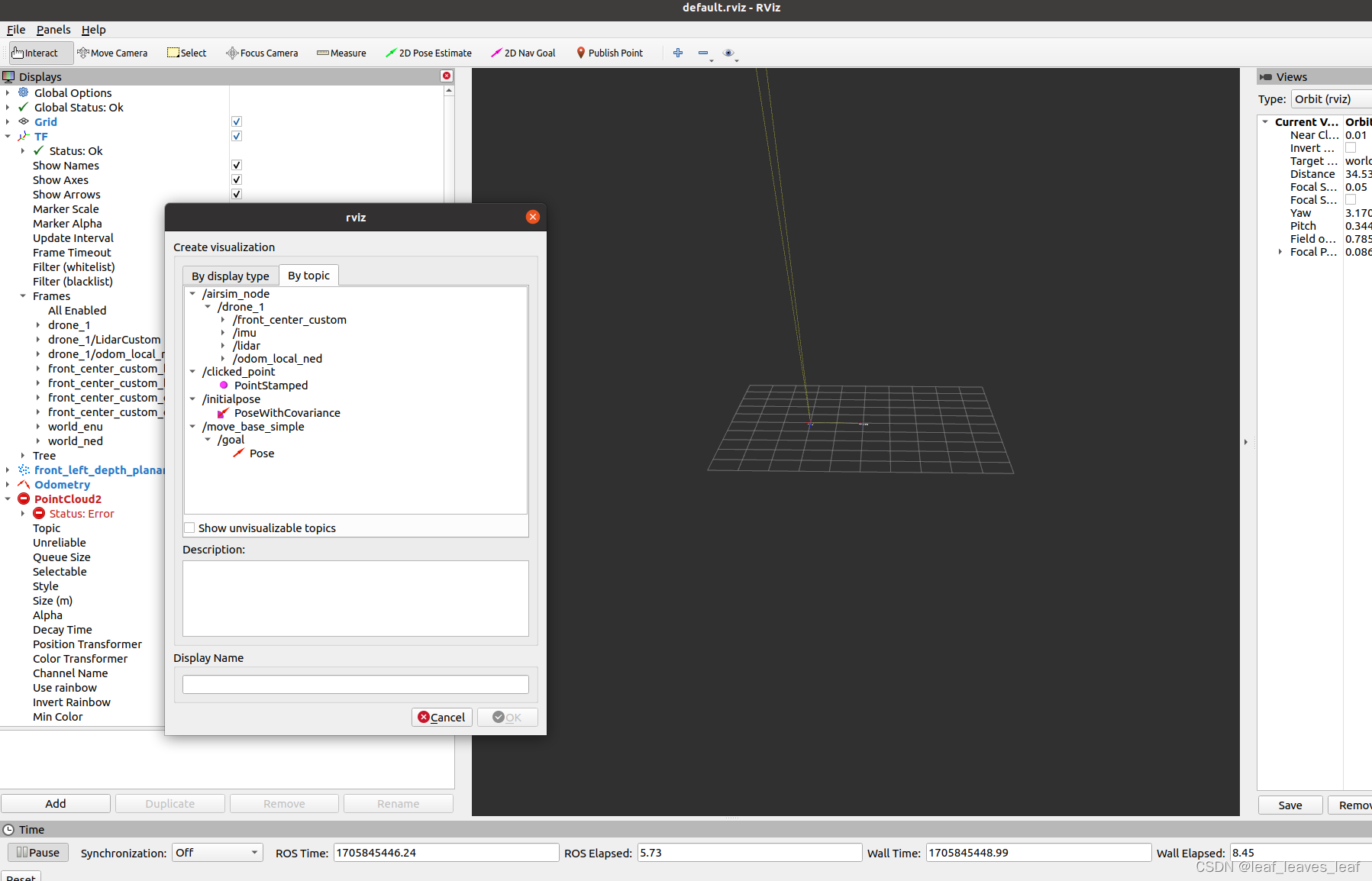
roslaunch airsim_ros_pkgs rviz.launch
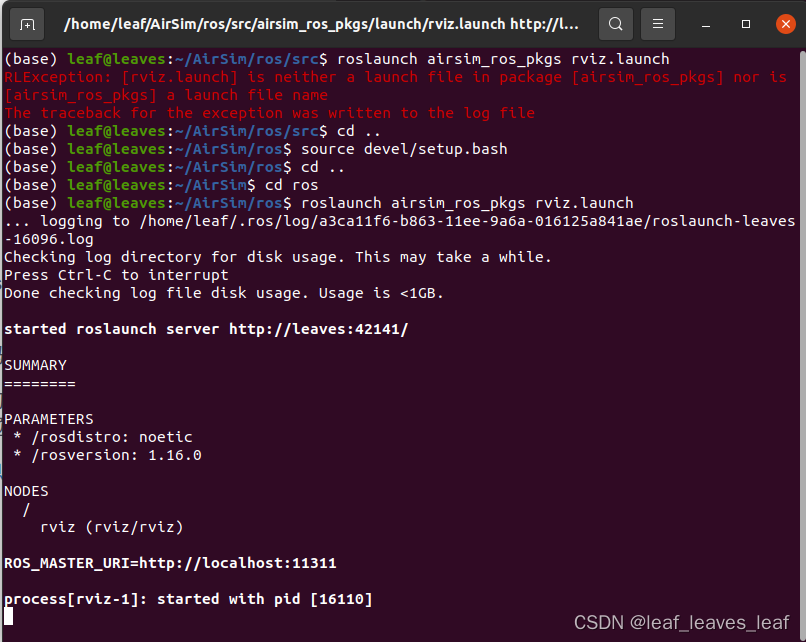
打开 rviz,点击左下角 Add,点击 By topic,添加自己想要查看的话题


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











