






图的基本概念及术语
读者可能不熟悉图论基础知识的一些符号,特此解释一部分。
突然接收这么多知识确实有些挑战,跟着学术一点的图论教程逐步学到这里会好很多,具体可参考《图论入门》。
- G G G:图
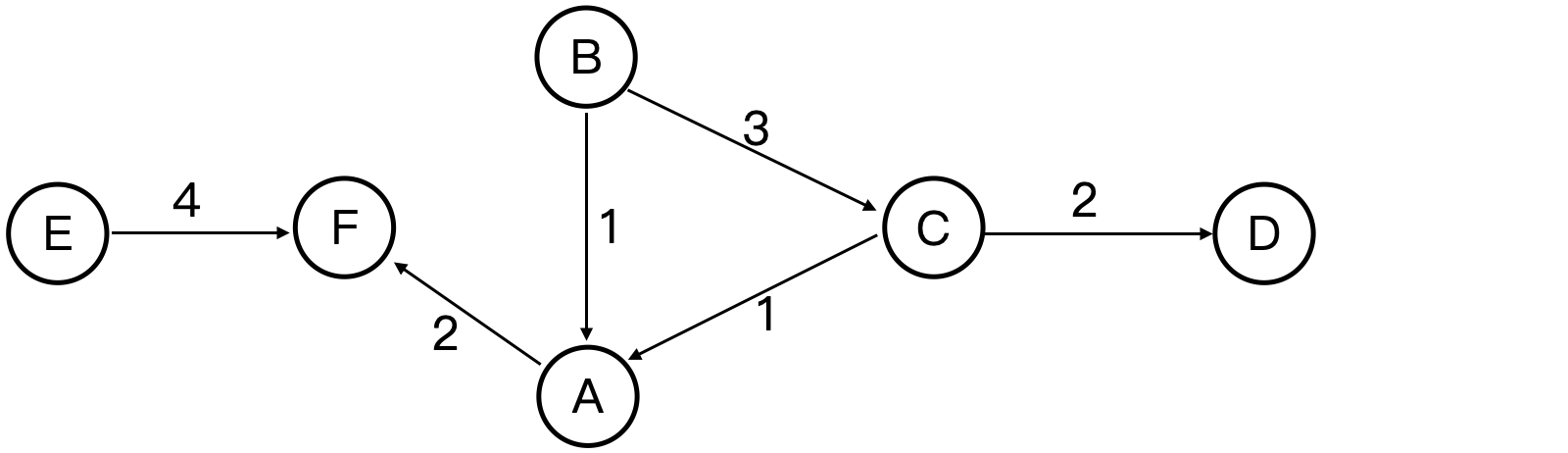
- V V V: 点集, 在上图中, V = { a , b , c , d , e , f } V = \{a,b,c,d,e,f\} V={a,b,c,d,e,f}
- E E E:边集
- w w w: 权重函数,上图中边上的数字,比如 w ( c , a ) = 1 w(c,a) = 1 w(c,a)=1。读者如果不熟悉图理解为边的长度即可。
- ∀ \forall ∀: 任意
- ( u , v ) (u, v) (u,v): 从点 u u u 到点 v v v 的边,一般表示能从 u u u 走向 v v v。
- ∈ \in ∈: 属于
所以 ∀ ( u , v ) ∈ E , w ( u , v ) ≥ 0 \forall (u, v) \in E, w(u,v) \geq 0 ∀(u,v)∈E,w(u,v)≥0 表示边集中任意边的权重 ≥ 0 \geq 0 ≥0。
其他的相关符号还有:
- ∣ V ∣ |V| ∣V∣ 或者 ∣ G . V ∣ |G.V| ∣G.V∣表示集合 V V V 的 size
- δ ( u , v ) \delta(u,v) δ(u,v) 表示图中 u , v u, v u,v 两点的距离(最短路径的权重和)。
- V δ ∪ { e } V_\delta \cup \{e\} Vδ∪{e} 表示向点集 V δ V_\delta Vδ 中加入点 e e e。
- G . A d j G.Adj G.Adj 表示邻接表, 上图中 G . A d j [ c ] = { a , d } G.Adj[c] = \{a,d\} G.Adj[c]={a,d}。存储从各点出发的可直达点以及权重,但在学术中权重用权重函数 𝑤 来表达。
最短路径
最短路径 (shortest paths) 的相关实际场景比较广泛,比如地图、网络等。
单源最短路径 (SSSP / single-source shortest paths) 是求解给定某一源点到其所有可达点的最短路径,即使得这些无权路径的边数或者带权路径的权重和最小。
Dijkstra 算法解决的是非负权图的 SSSP,未使用堆查找优化时,也被称为 Dijkstra 暴力算法。
Dijkstra 发音 /ˈdaɪkstrə/,译作“迪杰斯特拉“。
松弛 (Relax)
"松弛"这个术语出现得较多,含义同数学意义上的松弛相同,减少声明成立的约束条件。图的两点之间存在多条路径,找到最短的一条需要比较,每比较一次就减少一次约束。
但我认为此处从数学中沿用这个命名并不好。
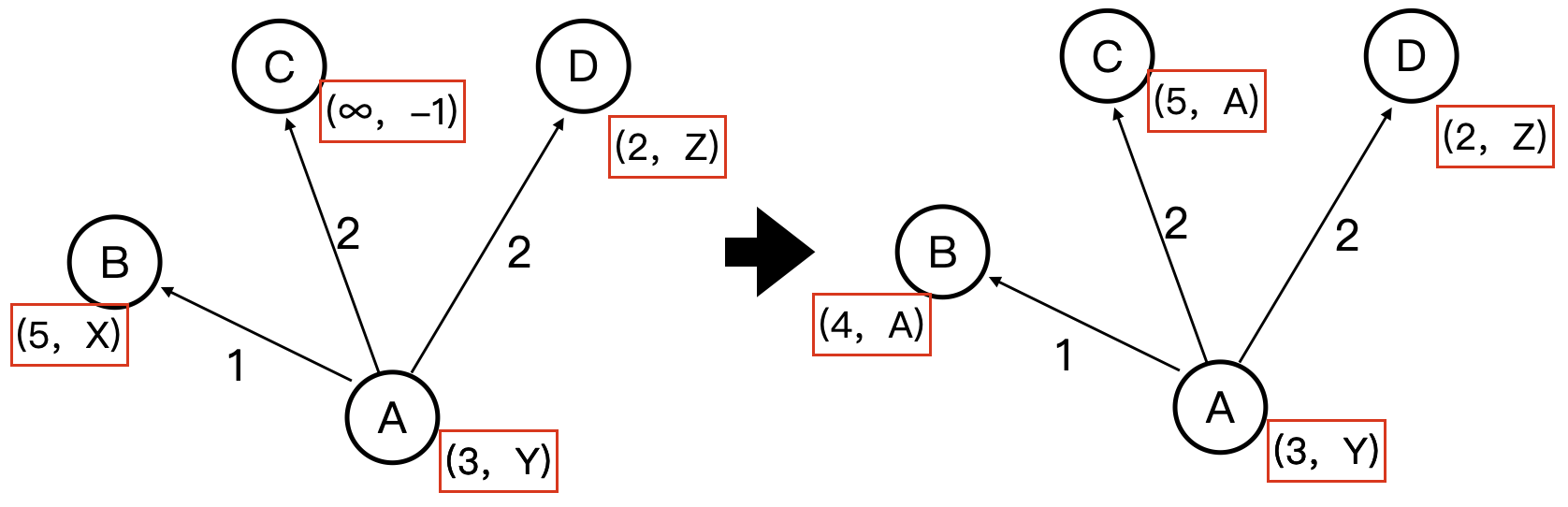
上图表示在 SSSP 中,忽略原图中的其他点和边,探索过程中某一时刻点 A 对其邻接点的松弛。
红框中的下标:
-
第一个:在当前探索范围内,源点到该点的的距离。
-
第二个:相应路径上的父节点。和各顶点一样,都是实际以数字存储,-1 表示没有父节点。
观察 A B 两点状态,3 + 1 < 5,说明 A 点所处路径向 B 延伸后比此前源点到 B 的路径更短,松弛有效。
同理可得对 C 松弛有效,对 D 松弛无效。
如果之后某刻 A 点再次被有效松弛了,那么应该继续松弛 B C D 点。
原理
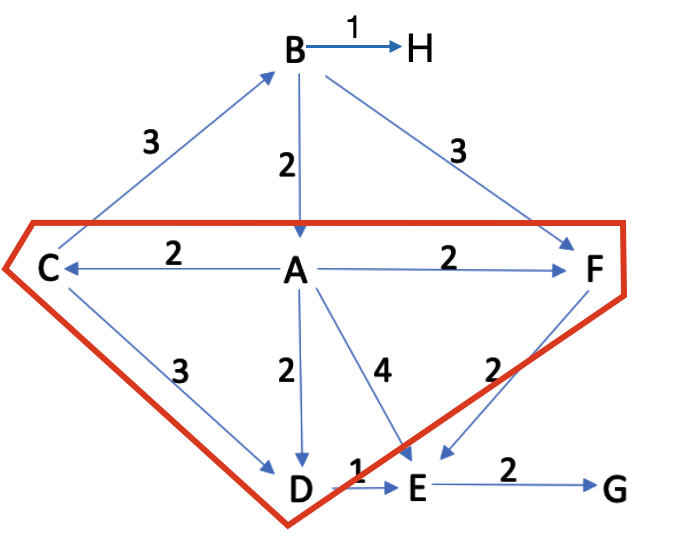
如上图所示,给定图
G
=
(
V
,
E
,
w
)
,
∀
(
u
,
v
)
∈
E
,
w
(
u
,
v
)
≥
0
G = (V, E, w),\forall (u,v) \in E, \ w(u,v)\geq 0
G=(V,E,w),∀(u,v)∈E, w(u,v)≥0。
a
a
a 为源点,求其到各可达点的最短路径。
设红框区域中的点集为
V
δ
V_\delta
Vδ,表示
V
V
V 中前
∣
V
δ
∣
|V_\delta|
∣Vδ∣ 个从
a
a
a 出发最近的点。
记某时刻
V
δ
=
{
a
,
c
,
d
,
f
}
V_{\delta} = \{a, c, d, f\}
Vδ={a,c,d,f}。这与 Prim 算法很相似。
从
V
δ
V_\delta
Vδ 外的可直达点
b
,
e
b, e
b,e 中选择离
a
a
a 最近的
e
e
e 点,记录相应路径
⟨
a
,
d
,
e
⟩
\langle a, d, e\rangle
⟨a,d,e⟩ 和其长度。
从
V
δ
V_\delta
Vδ 外的不可直达点
h
,
g
h, g
h,g 中任选一点记为
v
⇝
v^\leadsto
v⇝,路径
a
⇝
v
⇝
a \leadsto v^\leadsto
a⇝v⇝ 上一定至少经过
b
b
b 或
e
e
e,记该点为
v
→
∈
{
b
,
e
}
v^\rightarrow \in \{b, e\}
v→∈{b,e},路径为
a
⇝
v
→
⇝
v
⇝
a \leadsto v^\rightarrow \leadsto v^\leadsto
a⇝v→⇝v⇝。
既然
∀
(
u
,
v
)
∈
E
,
w
(
u
,
v
)
≥
0
\forall (u,v) \in E,\ w(u, v) \geq 0
∀(u,v)∈E, w(u,v)≥0,则
δ
(
a
,
v
→
)
≤
δ
(
a
,
v
⇝
)
\delta(a, v^\rightarrow) \leq \delta(a, v^\leadsto)
δ(a,v→)≤δ(a,v⇝)
根据
e
e
e 点的选择条件可知
δ
(
a
,
e
)
≤
δ
(
a
,
v
→
)
\delta(a, e) \leq \delta(a, v^\rightarrow)
δ(a,e)≤δ(a,v→),结合上式可得
δ
(
a
,
e
)
≤
δ
(
a
,
v
⇝
)
\delta(a, e) \leq \delta(a, v^\leadsto)
δ(a,e)≤δ(a,v⇝)
所以
e
e
e 为
{
b
,
e
,
h
,
g
}
\{b,e,h,g\}
{b,e,h,g} 即
V
−
V
δ
V- V_\delta
V−Vδ 中离
a
a
a 最近的点,此前记录的
⟨
a
,
d
,
e
⟩
\langle a,d,e \rangle
⟨a,d,e⟩ 为最短路径。
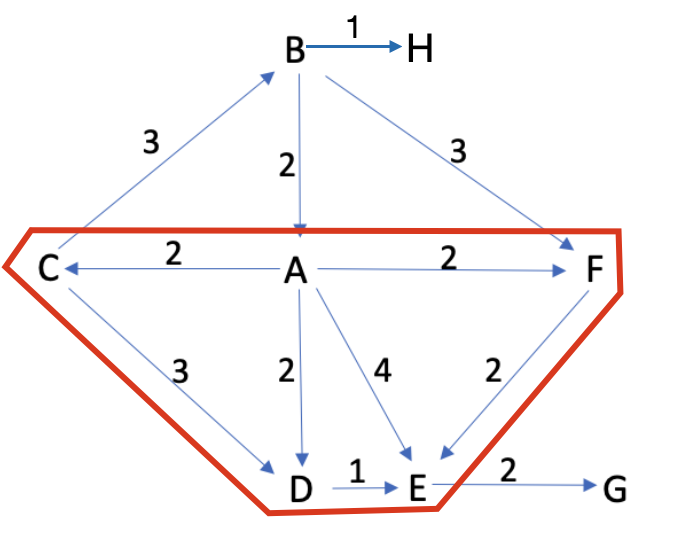
如上所示,令 V δ = V δ ∪ { e } V_\delta = V_\delta \cup \{e\} Vδ=Vδ∪{e}。再执行上一步,逐渐扩张即可找到 a a a 到所有可达点的最短路径。
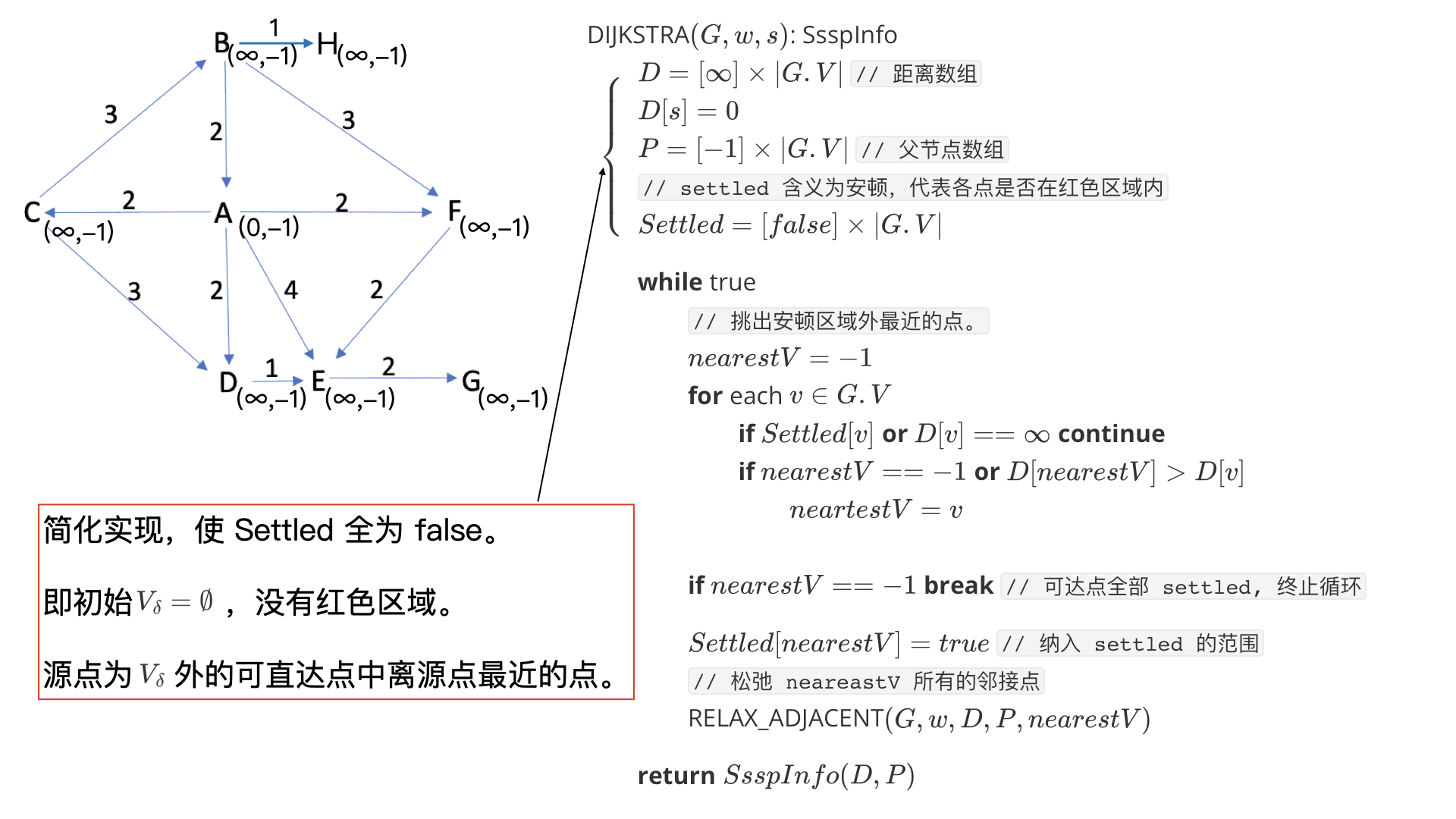
初始 V δ = { a } V_\delta = \{a\} Vδ={a}
Dijkstra 算法和 Prim 算法相比,取得周围最近点的思路有所变化,详见下面的算法实现。
求解
[ − 1 ] × ∣ G . V ∣ [-1] \times |G.V| [−1]×∣G.V∣ 表示长度为 ∣ G . V ∣ |G.V| ∣G.V∣,元素都为 − 1 -1 −1 的数组。
读者在初次接触伪代码时会不习惯。但据笔者的调查反馈,习惯后体验还是不错的。具体的术语和符号均在《图论入门》的附录中有介绍。
松弛部分被我抽离为一个函数,此函数表示松弛点 u u u 的所有邻接点。
- D D D 为数组 Distances,表示在当前探索范围内,源点到各点的距离。
- P P P 为数组 Parents,表示相应路径上的父节点。
- D D D 和 P P P 的数组下标表示顶点。

-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
 -=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=- -=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
记源点只通过已知的
V
δ
V_\delta
Vδ 到周围可直达点的最短距离和路径为
f
(
V
δ
)
f(V_\delta)
f(Vδ)。
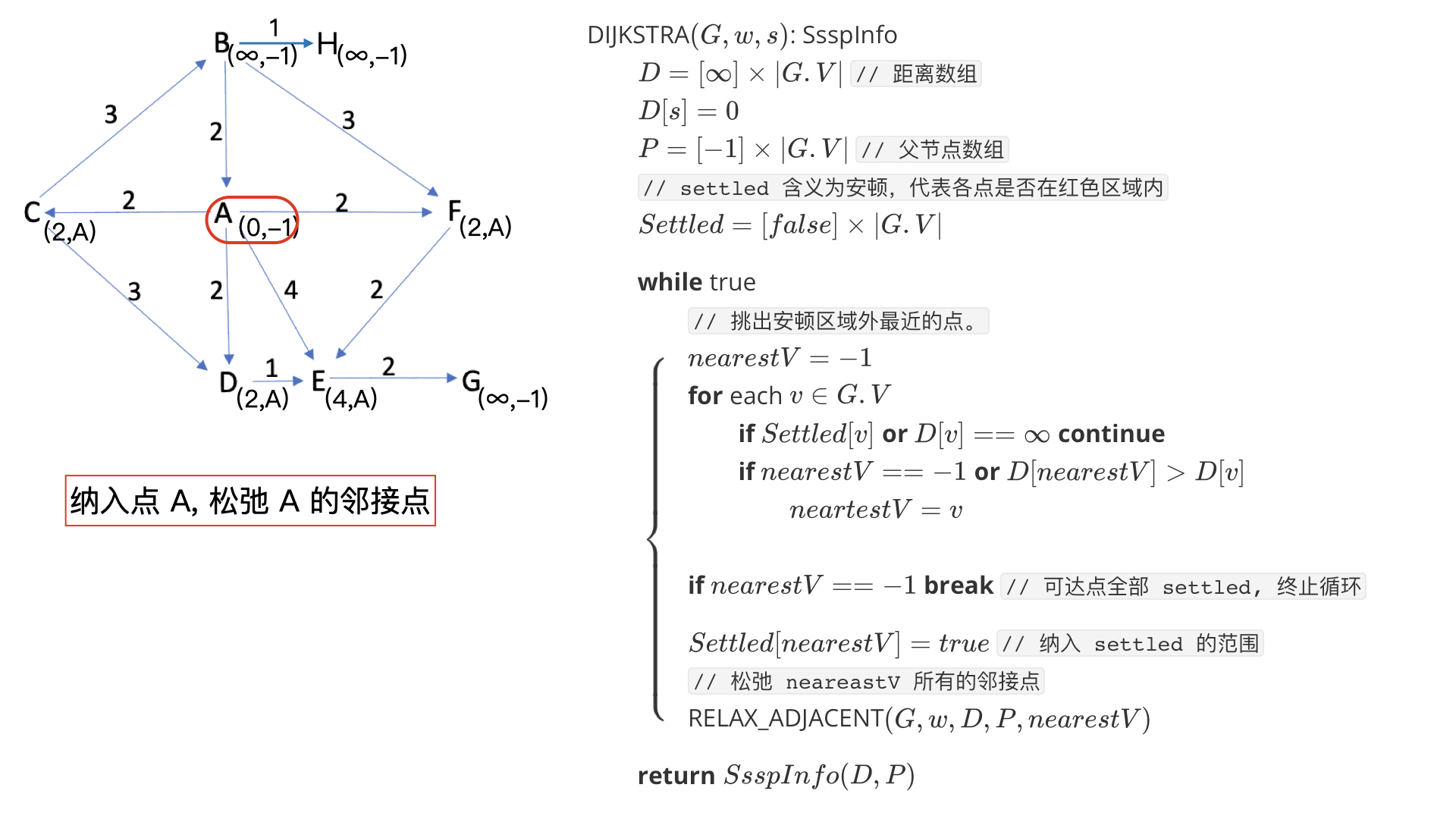
可得如果某一次松弛前,我们已经确定了 V δ V_\delta Vδ 和 f ( V δ ) f(V_\delta) f(Vδ),那么我们根据以上证明取最近的一点纳入 V δ V_\delta Vδ 是没错的,而且松弛该点的邻接点后就可以更新 f ( V δ ) f(V_\delta) f(Vδ)。
完整代码
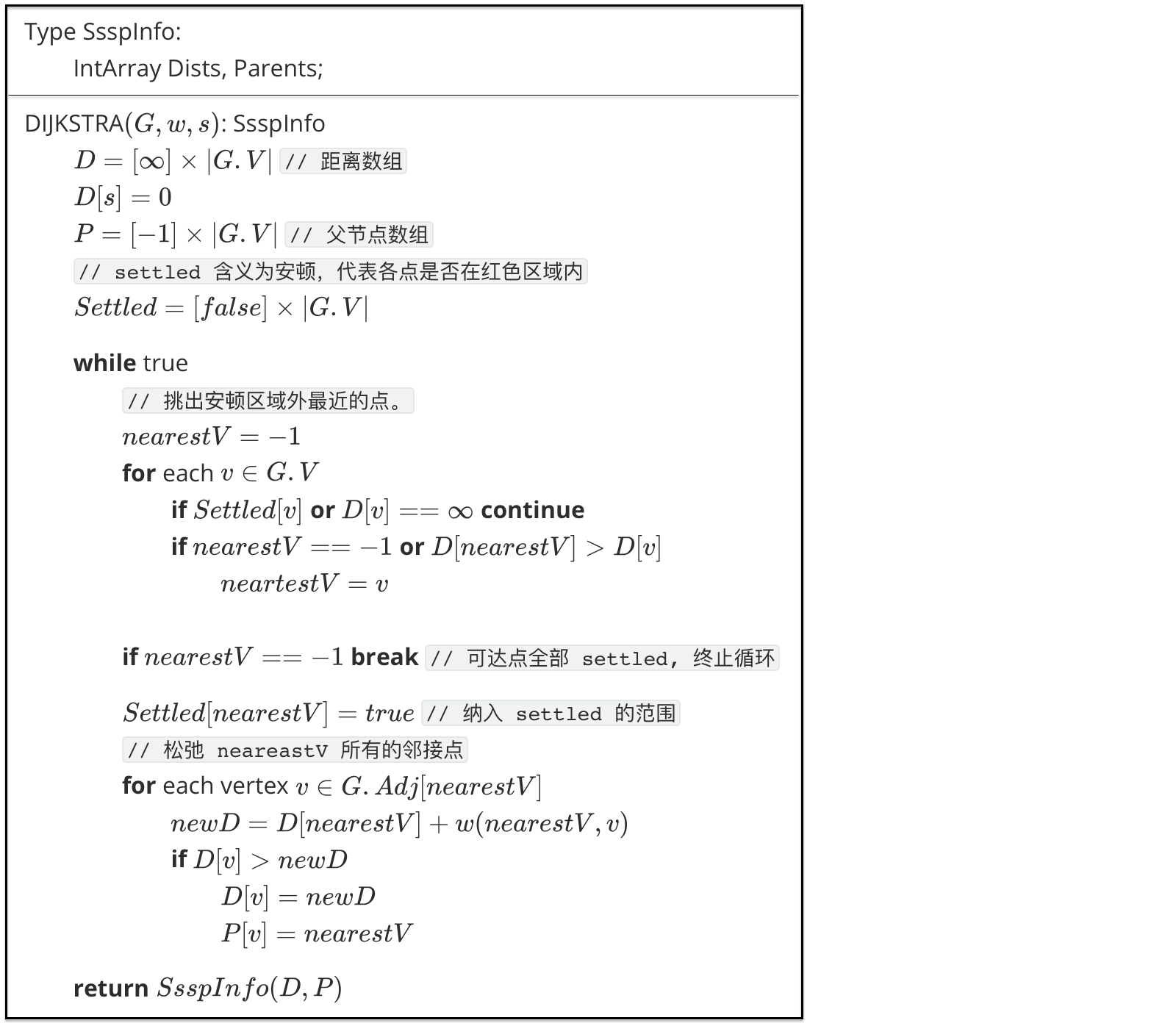
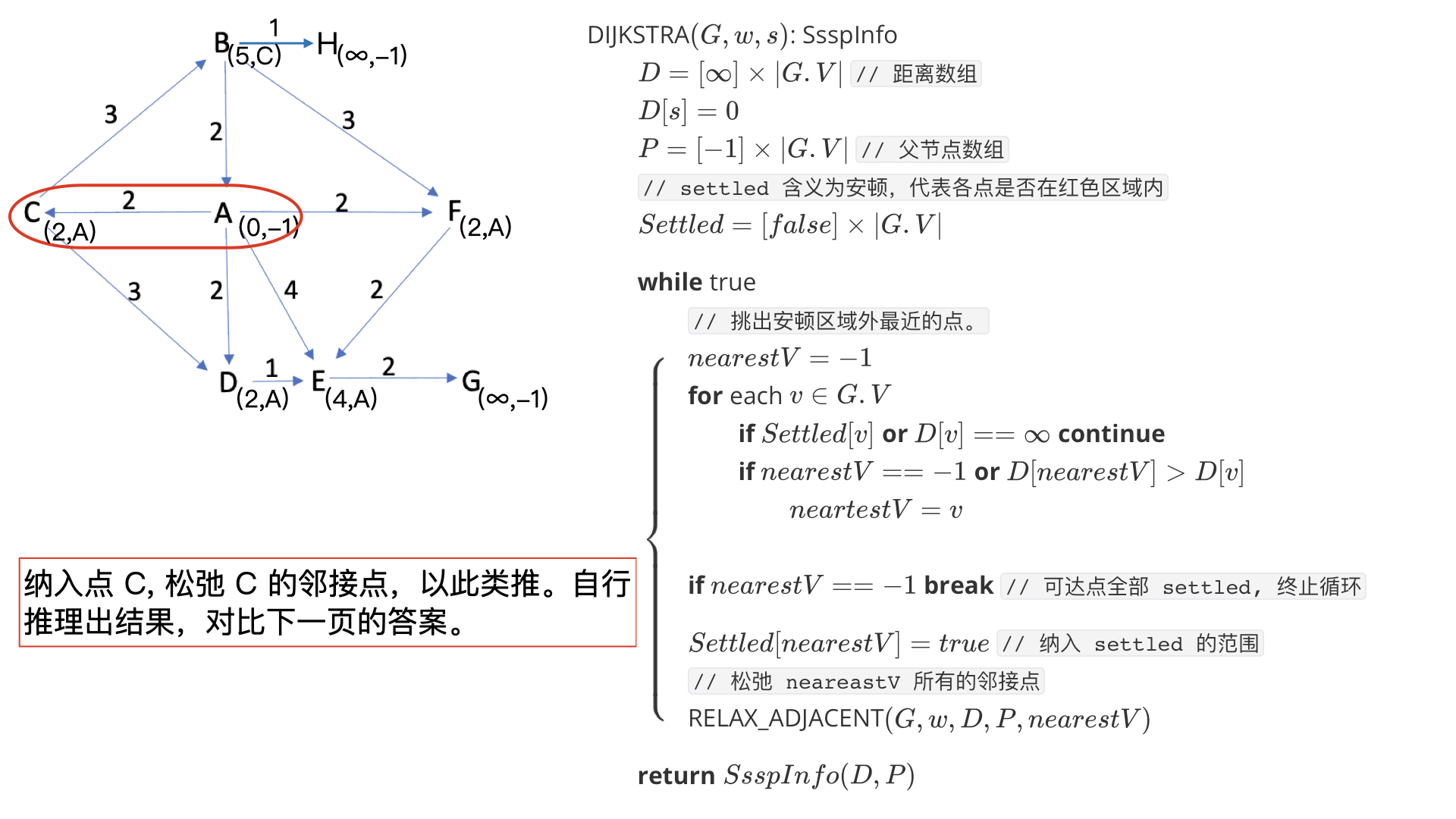
思考为什么松弛前不用判断点 n e a r e s t V nearestV nearestV 的邻接点是否 settled?
答:因为处于 settled 的点已经找到最短距离,松弛会一直无效。
除 Settled 外还有一些常见的命名,如 Visited、Done、Used。从语义上来看,Settled 和 Done 更加合适一些。
在很多只考虑距离的应试题中, D [ v ] D[v] D[v] 的更新可以简写为 D [ v ] = m i n ( D [ v ] , D [ n e a r e s t V ] + w ( n e a r e s t V , v ) ) D[v] = min(D[v],\ D[nearestV] + w(nearestV, v)) D[v]=min(D[v], D[nearestV]+w(nearestV,v))。
复杂度
时间:
O
(
V
2
)
O(V^2)
O(V2)
空间:
Θ
(
V
)
\Theta(V)
Θ(V)
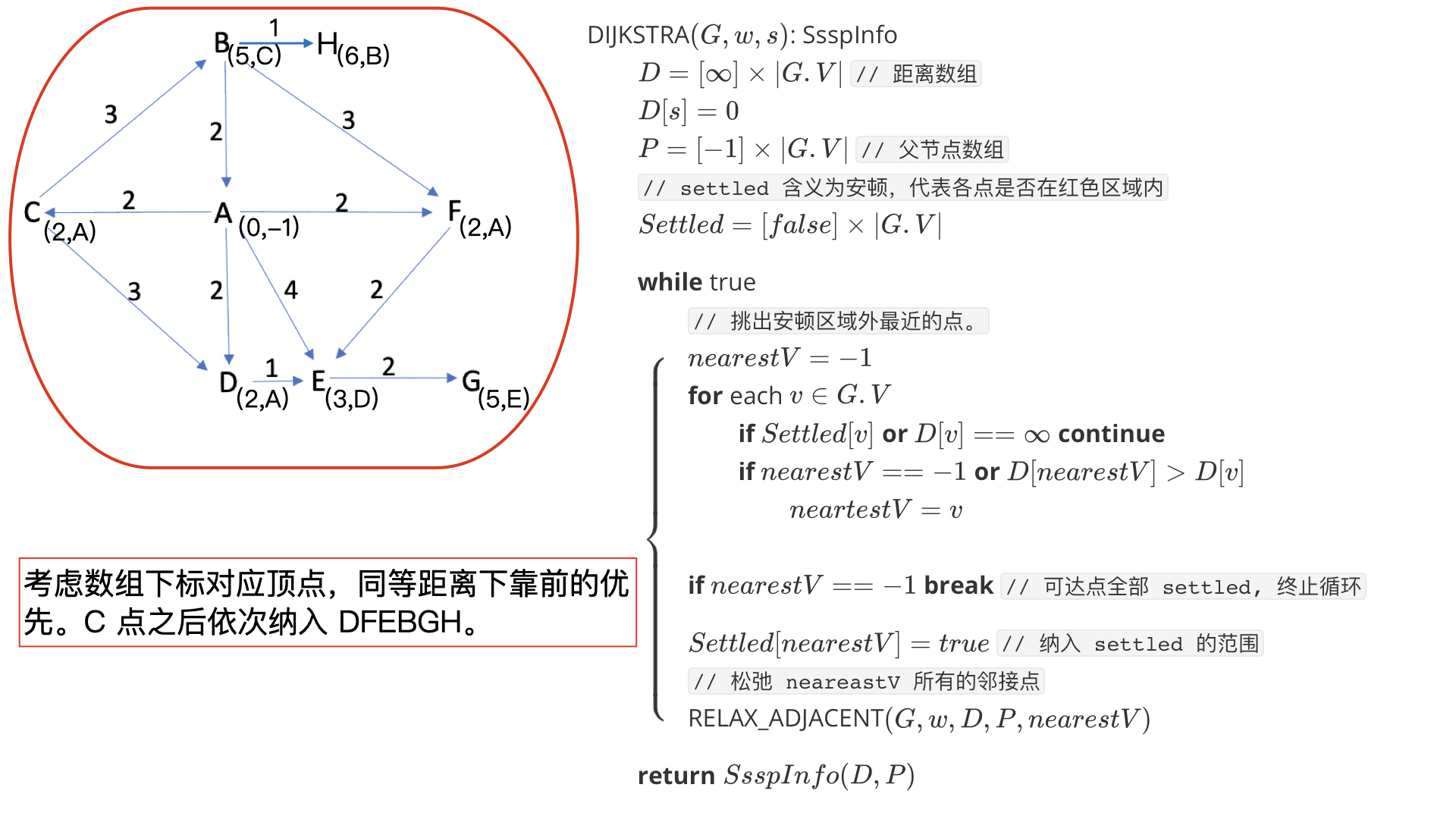
与 Prim 算法的复杂度分析大体相同,但本章考虑不可达导致提前截止的情况,所以时间复杂度不是 Θ ( V 2 ) \Theta(V^2) Θ(V2)。还可以用堆查找优化,但实现稍复杂,这在《图论进阶》中有讲到。
练习
给你一个由 n 个节点(下标从 0 开始)组成的无向加权图,该图由一个描述边的列表组成,其中 edges[i] = [a, b] 表示连接节点 a 和 b 的一条无向边,且该边遍历成功的概率为 succProb[i] 。
指定两个节点分别作为起点 start 和终点 end ,请你找出从起点到终点成功概率最大的路径,并返回其成功概率。
如果不存在从 start 到 end 的路径,请 返回 0 。只要答案与标准答案的误差不超过 1e-5 ,就会被视作正确答案。
示例1:
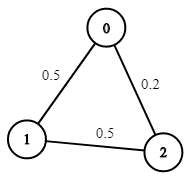
输入:n = 3, edges = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.2], start = 0, end = 2
输出:0.25000
解释:从起点到终点有两条路径,其中一条的成功概率为 0.2 ,而另一条为 0.5 * 0.5 = 0.25
求解:
Dijkstra 算法中的权重累计方式是相加,秉承非递减原则,最短路径上的权重和最小。
本题的权重累计方式是相乘,但权重(概率) ∈ [ 0 , 1 ] \in [0, 1] ∈[0,1],秉承非递增原则,求解概率最大的路径。
所以可以镜像转换松弛过程,代码如下所示。

根据原题中的提示部分(未展示在这里),可知该图是稀疏图,所以主流解法是二叉堆查找优化的版本。但这不属于内地本科的教学范围,在面试中也经常不太苛刻。二叉堆查找优化正好也属于《图论进阶》中免费的试读部分,读者有兴趣可以结合《图论入门》中 Prim 算法的两种堆查找优化看一下。
以下均为个人所著,兼顾了面试、本科、硕士阶段,包含清晰的 PPT 动画展示以及配套的练习题。读者也在陆续写其他算法教程。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









