





本文将详细讲解如何使用 STM32 单片机驱动ADXL345 三轴加速度 / 倾斜角度传感器(I2C 接口),并将采集到的三轴加速度数据、实时倾斜角度(横滚角 / 俯仰角)显示在 0.96 寸 I2C OLED 屏幕上。教程采用STM32F103C8T6最小系统板,代码基于 HAL 库开发,步骤清晰、代码可直接复用,适合新手学习和项目开发(如倾角仪、平衡车、姿态检测等场景)。
一、硬件准备与原理说明
1. 硬件清单
| 器件 | 数量 | 备注 |
|---|---|---|
| STM32F103C8T6 最小系统板 | 1 | 核心控制单元 |
| ADXL345 传感器模块 | 1 | 三轴加速度 / 倾斜角度检测,I2C/SPI 接口 |
| 0.96 寸 I2C 接口 OLED 屏 | 1 | 分辨率 128*64,SSD1306 驱动 |
| 杜邦线 | 若干 | 电路连接 |
| 5V 电源 / USB 数据线 | 1 | 给开发板供电 |
2. 核心原理
(1)ADXL345 传感器核心特点与原理
ADXL345 是一款低功耗、高精度的三轴加速度传感器,可检测 X/Y/Z 三个轴的加速度值,并通过算法转换为倾斜角度(横滚角 Roll、俯仰角 Pitch),核心特点如下:
- 通信接口:支持I2C(两线串行)和SPI(三线 / 四线)。
- 测量范围:可配置 ±2g/±4g/±8g/±16g(默认 ±2g,适合倾斜角度检测)。
- 数据输出:10 位数字量,加速度单位为
mg(1g=9.8m/s²=1000mg)。 - 地址配置:通过
ADDR引脚配置 I2C 地址(默认 7 位地址为0x53,接 VCC 为0x1D)。
倾斜角度计算原理:当传感器静止时,加速度仅受重力影响(重力加速度 g),通过三轴加速度值的比例关系,利用反正切函数可计算出倾斜角度:
- 横滚角(Roll):绕 X 轴旋转的角度,由 Y、Z 轴加速度计算:\(Roll = arctan(Y/\sqrt{X^2 + Z^2}) × (180/π)\)
- 俯仰角(Pitch):绕 Y 轴旋转的角度,由 X、Z 轴加速度计算:\(Pitch = arctan(X/\sqrt{Y^2 + Z^2}) × (180/π)\)
(2)OLED 显示原理
0.96 寸 OLED 屏采用 SSD1306 驱动芯片,通过 I2C 接口与 STM32 通信。由于 ADXL345 和 OLED 均为 I2C 设备(地址不同),可共用 STM32 的同一个 I2C 外设,简化硬件接线。
二、硬件接线
1. ADXL345 引脚说明
ADXL345 模块的核心引脚(I2C 模式):
VCC:供电(3.3V,推荐,与 STM32 电平匹配)GND:接地SCL:I2C 时钟线SDA:I2C 数据线- SDO:悬空
CS: 悬空INT1/INT2:中断输出脚(本教程暂不使用,悬空)
2. 整体接线表(STM32F103C8T6)
连接 ADXL345 和 OLED,接线如下:
| 设备引脚 | STM32 引脚 | 说明 |
|---|---|---|
| ADXL345-VCC | 3.3V | 传感器供电 |
| ADXL345-GND | GND | 共地 |
| ADXL345-SCL | PA11 | I2C1 时钟线 |
| ADXL345-SDA | PA12 | I2C1 数据线 |
| ADXL345-SDO | - | 悬空(暂不使用) |
| ADXL345-CS | - | 悬空(暂不使用) |
| ADXL345-INT1/2 | - | 悬空(暂不使用) |
| OLED-VCC | 3.3V | 屏幕供电 |
| OLED-GND | GND | 共地 |
| OLED-SCL | PB6 | I2C1 时钟线 |
| OLED-SDA | PB7 | I2C1 数据线 |
注意事项:
- 务必保证所有设备共地,否则 I2C 通信会失败。
- 若 OLED 为 5V 供电,需添加电平转换模块(如 PC817),避免 STM32 引脚被 5V 电压损坏。
三、软件准备
1. 开发环境
- STM32CubeMX:用于配置 STM32 外设,自动生成初始化代码。
- Keil MDK-ARM:用于编写、编译代码,下载程序到 STM32。
- ST-Link 调试器(或 USB 转串口):用于程序下载与调试。
四、代码编写
1. 导入 OLED 驱动代码
0.96 寸 I2C OLED 的驱动基于 SSD1306 芯片,需导入成熟的驱动文件(网络上可下载通用版):
- 在 Keil 工程的
Src目录下新建oled.c,Inc目录下新建oled.h。 - 将 SSD1306 的 I2C 驱动代码复制到这两个文件中(核心功能:OLED 初始化、清屏、显示字符 / 字符串 / 数字)。
关键提示:OLED 的 I2C 地址默认是
0x78(7 位地址左移一位为 0xF0),若屏幕无显示,可尝试修改为0x7A。
2. 编写 ADXL345 驱动代码
新建adxl345.c(Src 目录)和adxl345.h(Inc 目录),实现 ADXL345 的 I2C 通信、加速度读取和角度计算功能。
(1)adxl345.c 文件代码(部分)
//连读读取几次取平均值函数
//times 取平均值的次数
void adxl345_read_average(float *x,float *y,float *z,uint8_t times)
{
uint8_t i;
short tx,ty,tz;
*x=0;
*y=0;
*z=0;
if(times)//读取次数不为0
{
for(i=0;i<times;i++)//连续读取times次
{
adxl345_read_data(&tx,&ty,&tz);
*x+=tx;
*y+=ty;
*z+=tz;
delay_ms(5);
}
*x/=times;
*y/=times;
*z/=times;
}
}
void get_angle(float *x_angle,float *y_angle,float *z_angle)
{
float ax,ay,az;
adxl345_read_average(&ax,&ay,&az,10);
*x_angle=atan(ax/sqrt((az*az+ay*ay)))*180/3.14;
*y_angle=atan(ay/sqrt((ax*ax+az*az)))*180/3.14;
*z_angle=atan(sqrt((ax*ax+ay*ay)/az))*180/3.14;
}
(2)adxl345.h文件代码
/**
****************************************************************************************************
* @file adxl345.h
* @author 送外卖的工程师
* @version V1.0
* @date 2025-12-14
* @brief 三轴加速度传感器驱动代码
****************************************************************************************************
* @attention
*
* 实验平台:STM32F103C8T6
* CSDN:送外卖的工程师
* 技术指导VX:wmz14026
* 淘宝店铺:小马科技
* 闲鱼店铺:送外卖的工程师
*
* 修改说明
* V1.0.0.251214
* 第一次发布
* 注:长期接各种项目设计,提供仿真、实物、原理图、PCB、代码工程、后期指导、操作视频、
说明文档、各种报告、后期指导等。
****************************************************************************************************
*/
#ifndef __ADXL345_H
#define __ADXL345_H
#include "main.h"
/***************根据自己需求更改****************/
//ADXL345引脚宏定义
#define ADXL345_SCL_PORT GPIOA
#define ADXL345_SCL_PIN GPIO_PIN_11
#define ADXL345_SCL_GPIO_CLK __HAL_RCC_GPIOA_CLK_ENABLE();
#define ADXL345_SDA_PORT GPIOA
#define ADXL345_SDA_PIN GPIO_PIN_12
#define ADXL345_SDA_GPIO_CLK __HAL_RCC_GPIOA_CLK_ENABLE();
#define ADXL345_SDA_H HAL_GPIO_WritePin(ADXL345_SDA_PORT,ADXL345_SDA_PIN, GPIO_PIN_SET);
#define ADXL345_SDA_L HAL_GPIO_WritePin(ADXL345_SDA_PORT,ADXL345_SDA_PIN, GPIO_PIN_RESET);
#define ADXL345_SCL_H HAL_GPIO_WritePin(ADXL345_SCL_PORT,ADXL345_SCL_PIN, GPIO_PIN_SET);
#define ADXL345_SCL_L HAL_GPIO_WritePin(ADXL345_SCL_PORT,ADXL345_SCL_PIN, GPIO_PIN_RESET);
/*********************END**********************/
#define X_AXLE 0 //x轴
#define Y_AXLE 1 //y轴
#define Z_AXLE 2 //z轴
#define slaveaddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改
// ALT ADDRESS引脚接地时地址为0xA6,接电源时地址为0x3A
#define THRESH_TAP 0X1D //敲击中断阈值(用于正常敲击检测)
// 16g模式中,62.5mg/Bit
#define OFSX 0X1E //X轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define OFSY 0X1F //Y轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define OFSZ 0X20 //Z轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define DUR 0x21 //敲击阈值时间 625uS/Bit
#define LATENT 0X22 //敲击事件到时间窗口的延迟时间,在此期间
// 可检测第二次敲击时间 1.25mg/Bit
#define WINDOW 0X23 //敲击窗口,延迟时间满后的时间量,在此期间
// 能开始进行第二次有效敲击 1.25mg/Bit
#define THRESH_ACT 0X24 //检测活动的阈值,活动事件的幅度与该寄存器
// 的值进行比较 62.5mg/Bit
#define THRESH_INACT 0X25 //检测静止的阈值,静止事件的幅度与该寄存器
// 的值进行比较 62.5mg/Bit
#define TIME_INACT 0X26 //加速度时间量小于该寄存器的值表示静止 1S/Bit
#define ACT_INACT_CTL 0X27
//Bit 7,3 ACT交流/直流[INACT交流/直流]:0选择直流耦合;1使能交流耦合 直流时将
// 当前加速度值直接与THRESH_ACT和THRESH_INACT
// 进行比较,确定检测到的是活动还是静止
// 6,2 ACT_X使能[INACT_X使能]:设置为1,使能X轴参与检测活动或静止;活动检测时,
// 所有轴为逻辑"或",有任意轴超过阈值时,活动功能触发
// 禁止检测时,所有轴为逻辑"与",只有当所有轴低于阈值
// 时,静止功能触发
// 5,1 ACT_Y使能[INACT_Y使能]:与X轴类似
// 4,0 ACT_Z使能[INACT_Z使能]:与X轴类似
#define THRESH_FF 0X28 //阈值,用于自由落体检测,所有轴加速度与该寄存器值比较
// ,以确定是否发生自由落体 62.5mg/Bit,建议300mg与600mg之间
#define TIME_FF 0X29 //维持THRESH_FF阈值的最小时间,以生成自由落体中断 5mS/Bit
#define TAP_AXES 0X2A
// Bit 7:4 0
// 3 抑制 两次敲击之间出现大于THRESH_TAP值得加速度,设置抑制会抑制双击检测
// 2 TAP_X使能 设置为1时,使能X轴进行敲击检测,0时排除该轴的敲击检测
// 1 TAP_Y使能 设置为1时,使能Y轴进行敲击检测,0时排除该轴的敲击检测
// 0 TAP_Z使能 设置为1时,使能Z轴进行敲击检测,0时排除该轴的敲击检测
#define ACT_TAP_STATUS 0X2B /*只读寄存器*/
// Bit 7 0
// 6,2 ACT_X来源,TAP_X来源:表示涉及敲击或活动事件的第一轴,设置为1时,对应事件参与
// 设置为0时,对应未参与.不会自动清零,新数据覆盖,中断清零前
// 应读取该寄存器
// 5,1 ACT_Y来源,TAP_Y来源:与X相似
// 4,0 ACT_Z来源,TAP_Z来源:与X相似
// 3 休眠设置为1时,器件进入休眠状态
#define BW_RATE 0X2C
// Bit 7:5 0
// 4 LOW_POWER 低功耗位,0选择正常模式,1进入低功耗模式
// 3:0 速率位
#define POWER_CTL 0X2D
// Bit 7,6 0
// 5 链接 设置1时,延迟活动开始,直到检测到静止.检测到活动后,禁止检测开始,活动
// 检测停止,设置时动态链接活动和静止交替检测;设置0时静止与活动同时检测
// 4 AUTO_SLEEP 设置1时自动休眠,检测出静止后,进行休眠模式,活动使能后被唤醒
// 3 测量 0待机 1测量模式
// 2 休眠 0普通 1休眠
// 1,0 唤醒(休眠模式下的读取频率) "00":8HZ "01":4HZ "10":2HZ "11":1HZ
#define INT_ENABLE 0X2E //中断使能配置
// Bit 7 DATA_READY
// 6 SINGLE_TAP
// 5 DOUBLE_TAP
// 4 Activity
// 3 Inactivity
// 2 FREE_FALL 自由落体中断
// 1 Watermark
// 0 Overrun
#define INT_MAP 0X2F //中断映射 自读寄存器
//位与INT_ENABLE对应,,设置为0,该中断映射到INT1引脚;设置为1,该中断映射到INT2引脚
#define INT_SOURCE 0X30 //中断来源
//位与INT_ENABLE对应,1表示该功能触发
#define DATA_FORMAT 0X31
// Bit 7 SELF_TEST 设置1,自测力应用至传感器,造成输出数据转换;0时禁用自测力
// 6 SPI 1设置为3线SPI模式,0时设置4线SPI模式
// 5 INT_INVERT 0时中断高电平有效,1时低电平有效
// 4 0
// 3 FULL_RES 1时设置全分辨率模式,输出以4mg/Bit增加;0时为10位模式
// 2 Justify 1为左对齐模式;8为右对齐模式,并带有符号扩展
// 1:0 范围位 "00"±2g "01"±4g "10"±8g "11"±16g
#define DATAX0 0X32
#define DATAX1 0X33 //与DATAX0组成x轴输出数据(二进制补码),DATAX1为高位,4mg/Bit
#define DATAY0 0X34
#define DATAY1 0X35 //与DATAY0组成Y轴输出数据(二进制补码),DATAY1为高位,4mg/Bit
#define DATAZ0 0X36
#define DATAZ1 0X37 //与DATAZ0组成Z轴输出数据(二进制补码),DATAZ1为高位,4mg/Bit
#define FIFO_CTL 0X38
// Bit 7,6 FIFO_MODE "00" 旁路模式
// "01" FIFO模式 可收集最多32个值,然后停止收集数据
// "10" 流模式 FIFO保存最后32个数据值,FIFO满时,新数据覆盖最早数据(先进先出)
// "11" 触发器 通过触发位触发,FIFO在触发事件前保存最后的数据样本,然后
// 继续收集数据直到填满;填满后,不再收集新数据
// 5 触发位 0链接触发器模式下的触发事件至INT1,1链接至INT2
// 4:0 样本 功能取决于FIFO模式:FIFO模式时,指定触发水印中断需要的FIFO条目数
// 流模式时,指定触发水印中断需要的FIFO条目数
// 触发器模式:指定触发事件之前在FIFO缓冲区要保留的FIFO样本数
// 样本位设置为0时,不管哪种FIFO模式,立即在INT_SOURCE寄存器设置水印状态位
#define FIFO_STATUS 0X39 /*只读寄存器*/
// Bit 7 FIFO_TRIG FIFO_TRIG为1时表示有触发事件发生
// 6 0
// 5:0 条目位 报告FIFO存储的数据值的数量
//#define slaveaddress 0XA6//write
#define regaddress 0XA7//read
#define DEVICE_ID 0X00
void ADXL345_IIC_SDA_Mode(uint8_t mode);//ADXL345引脚输出模式控制
void ADXL345_IIC_SDA_OUT(void);
void ADXL345_IIC_SDA_IN(void);
void ADXL345_IIC_Init(void);
void ADXL345_IIC_Start(void);
void ADXL345_IIC_Stop(void);
void ADXL345_IIC_Ack(void);
void ADXL345_IIC_NAck(void);
uint8_t ADXL345_IIC_Wait_Ack(void);
void ADXL345_IIC_Send_Byte(uint8_t txd);
uint8_t ADXL345_IIC_Read_Byte(uint8_t ack);
void ADXL345_Init(void);
uint8_t adxl345_read_reg(uint8_t addr);
void adxl345_write_reg(uint8_t addr,uint8_t val);
void adxl345_read_data(short *x,short *y,short *z);
void adxl345_read_average(float *x,float *y,float *z,uint8_t times);
void ADXL345_Start(void);
void ADXL345_Stop(void);
void get_angle(float *x_angle,float *y_angle,float *z_angle);
#endif
五、下载与测试
1. 编译代码
- 在 Keil 中点击
Build(编译)或Rebuild(重新编译),确保代码无错误。 - 若出现
undefined reference to sqrt或atan2错误,检查是否添加了数学库(-lm)。 - 若出现浮点数相关错误,检查是否开启
Use MicroLIB。
2. 下载程序
- 将 ST-Link 调试器连接到 STM32 的 SWD 接口(SWDIO、SWCLK、GND)。
- 在 Keil 中点击
Download(下载),将程序烧录到 STM32 中。
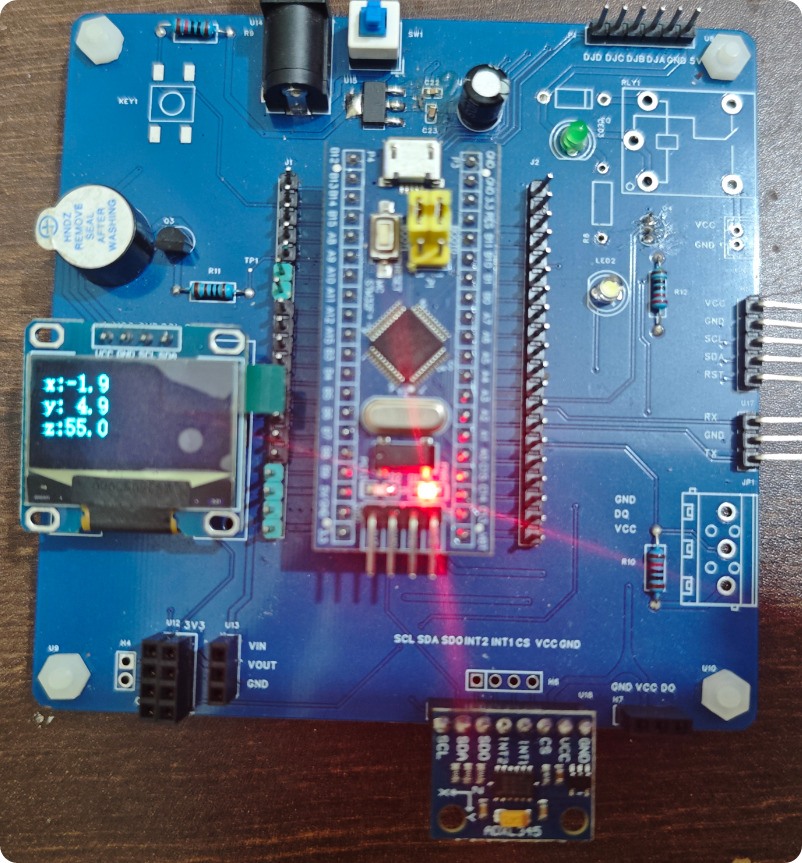
3. 测试效果
- 给 STM32 供电,OLED 屏幕会显示X轴、Y轴、Z轴。
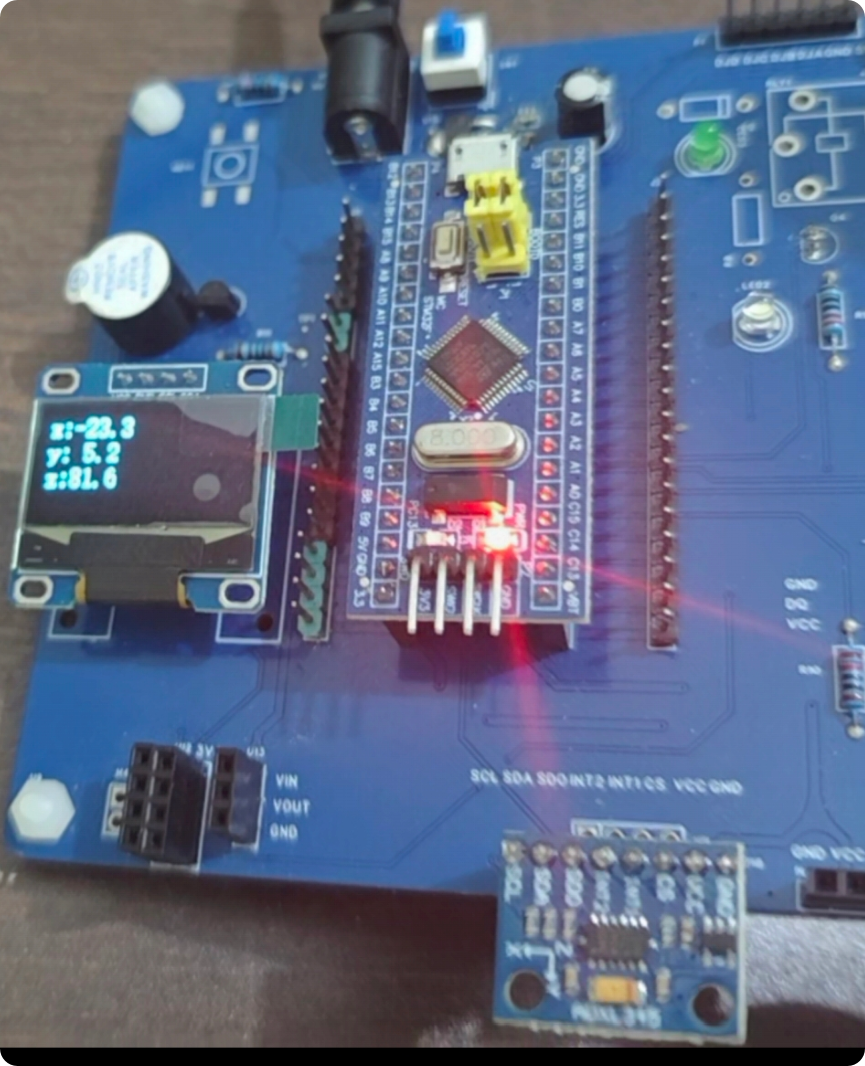
- 缓慢倾斜 ADXL345 传感器(如绕 X 轴 / Y 轴旋转),观察 OLED 上值是否随倾斜角度实时变化。
x轴倾斜:
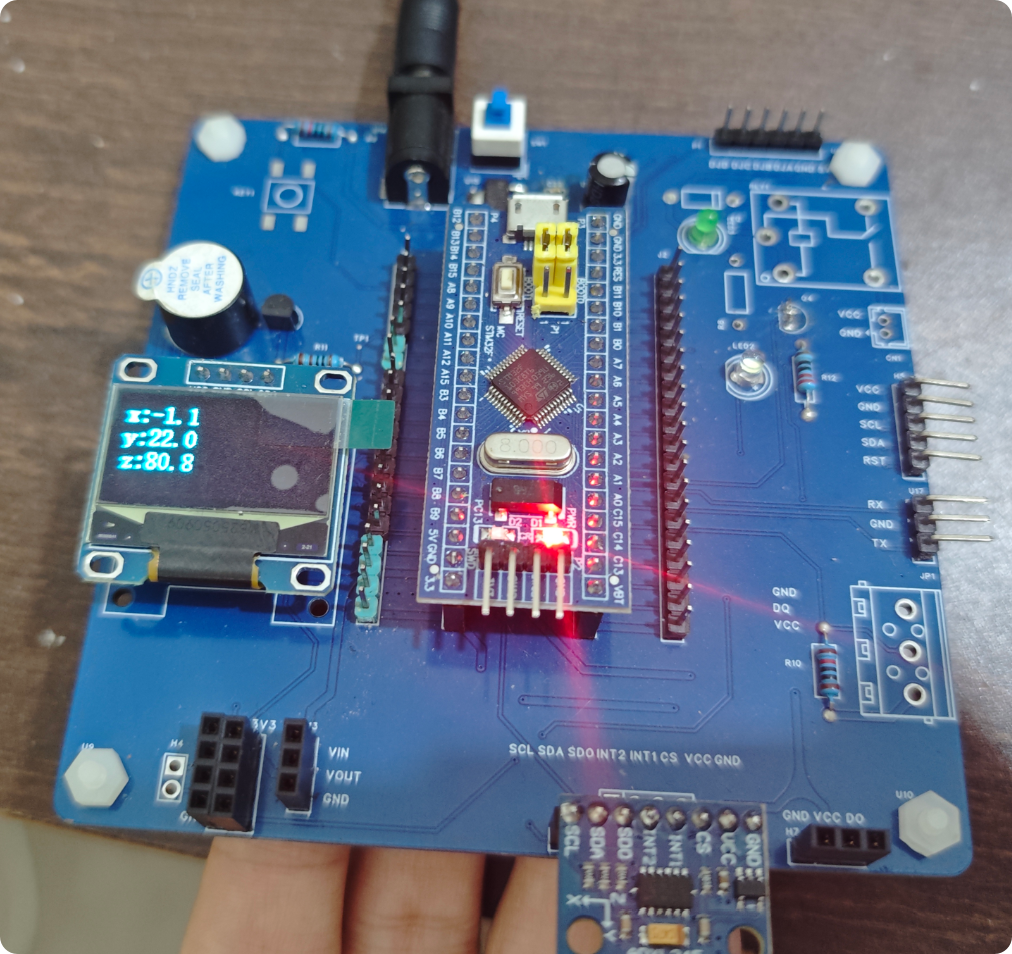
y轴倾斜:
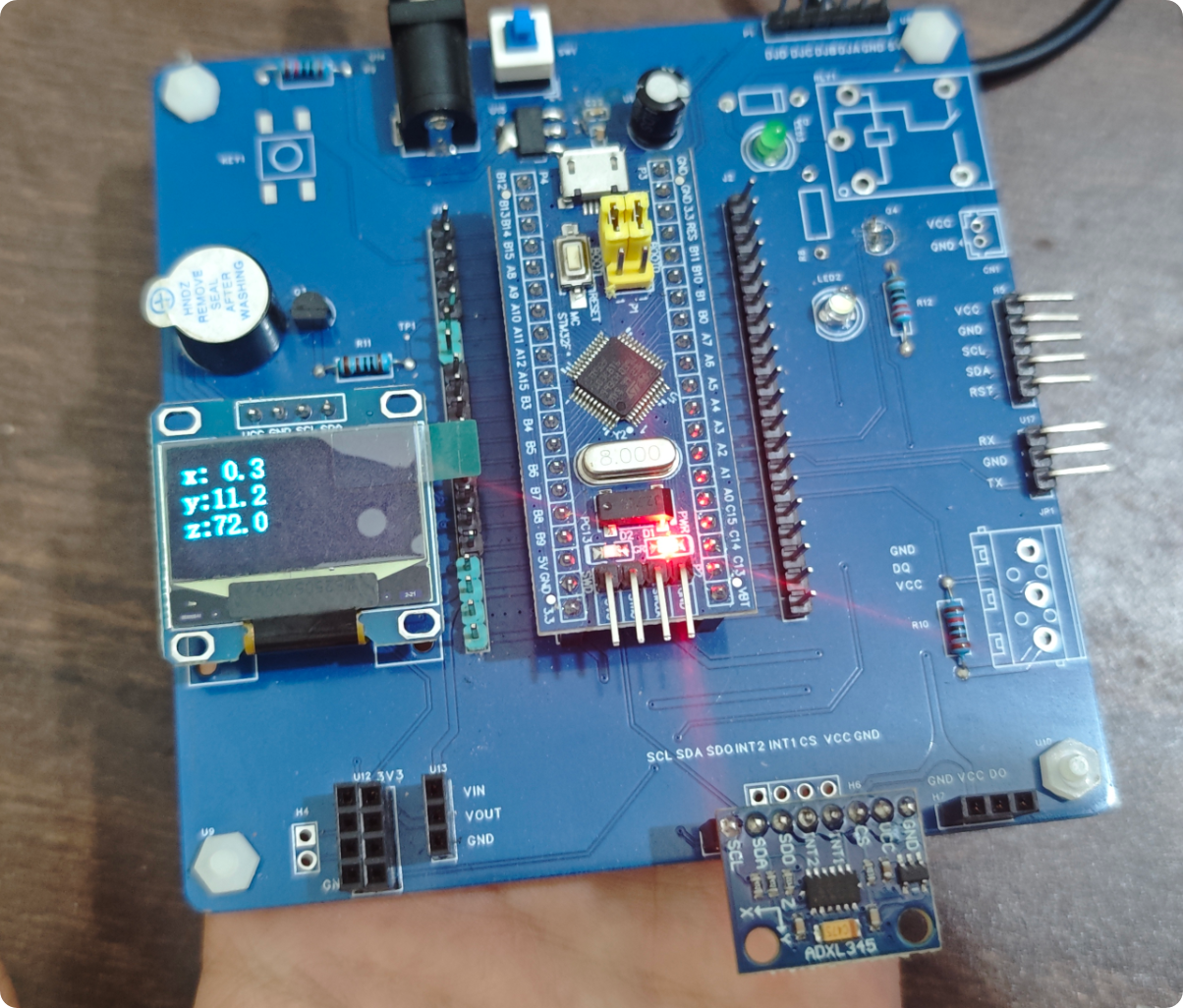
z轴倾斜:
六、常见问题解决
1. OLED 屏幕无显示
- 检查 OLED 的 VCC/GND 是否接对,确保 3.3V 供电正常。
- 确认 OLED 的 I2C 地址是否为
0x78(可改为0x7A重试)。 - 检查 SCL/SDA 引脚是否接反(PB6=SCL,PB7=SDA)。
2. ADXL345 初始化失败(程序卡死)
- 检查传感器的 VCC/GND 是否接对,确保 3.3V 供电。
- 确认
ADXL345_ADDR是否与硬件配置一致。 - 检查 I2C 引脚是否虚焊或接反。

















 605
605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









