






项目工程:https://github.com/Monday-Leo/YOLOv8_Tensorrt
此链接有视频教程,根据此视频能够初步实现部署
主要记录以下自己修改的代码
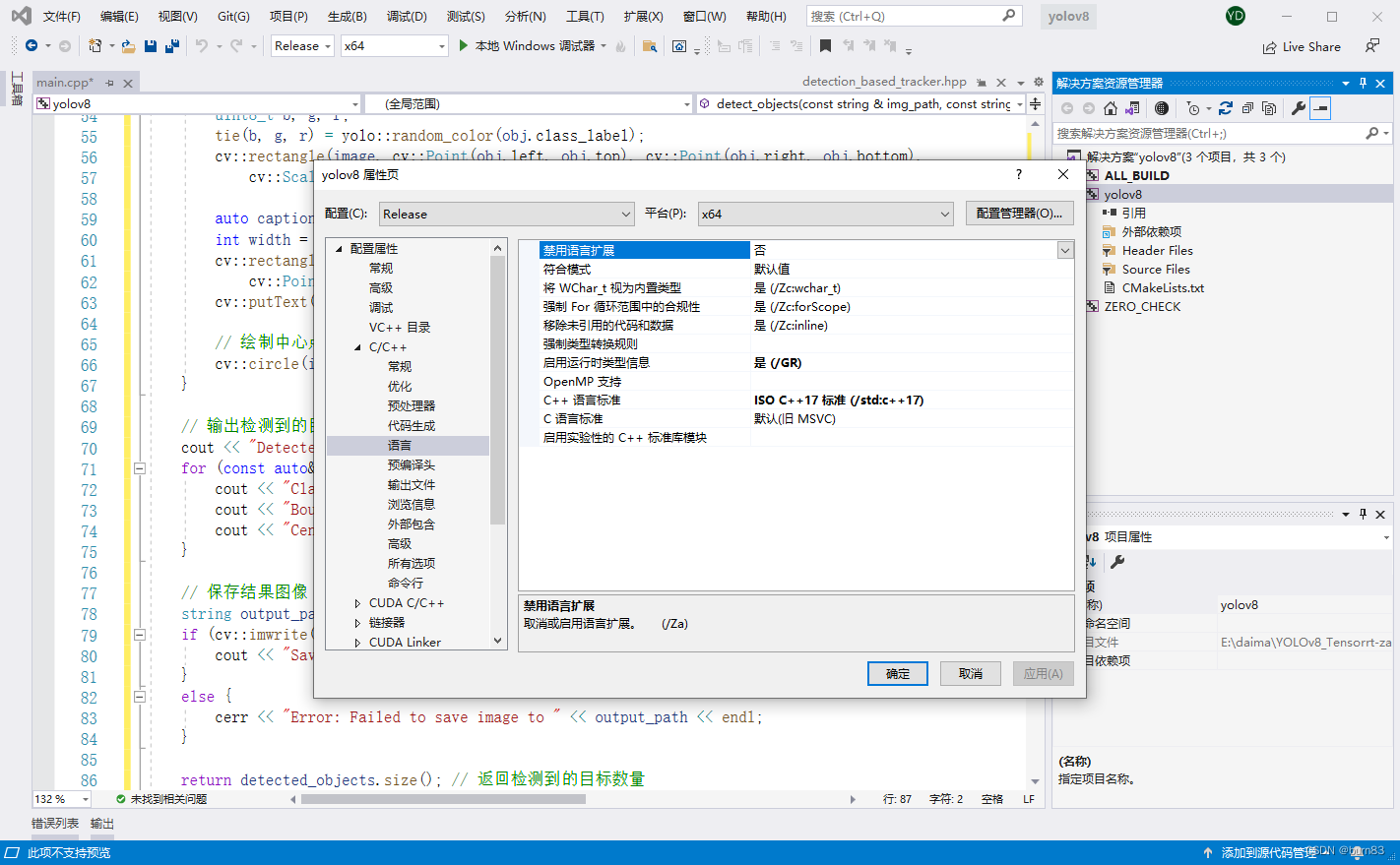
filesystem 这个基本库需要在项目配置中将语言标准调成c++17
如图所示
#include <opencv2/opencv.hpp>
#include "yolo.hpp"
#include <filesystem> //c++17
#include <iostream>
#include <vector>using namespace std;
namespace fs = std::filesystem;static const char* mylabels[] = { "feather", "grass", "other", "paper", "plastic" };
// 结构体用于存储检测到的目标信息
struct DetectedObject {
string label;
float confidence;
cv::Rect bbox;
cv::Point center; // 中心点
};// 将图像路径转换为完整的输出路径
string get_output_path(const string& img_path, const string& output_folder) {
fs::path img_path_obj(img_path);
return (fs::path(output_folder) / img_path_obj.filename()).string();
}// 目标检测函数
int detect_objects(const string& img_path, const string& model_path, const string& output_folder) {
cv::Mat image = cv::imread(img_path);
if (image.empty()) {
cerr << "Error: Unable to read image " << img_path << endl;
return 0;
}float confidence_threshold = 0.25f;
float nms_threshold = 0.5f;
auto yolo = yolo::load(model_path, yolo::Type::V8, confidence_threshold, nms_threshold);
if (yolo == nullptr) {
cerr << "Error: Unable to load YOLO model from " << model_path << endl;
return 0;
}auto objs = yolo->forward(yolo::Image(image.data, image.cols, image.rows));
// 绘制边界框、计算中心点和保存结果
vector<DetectedObject> detected_objects; // 存储检测到的目标信息
for (auto& obj : objs) {
DetectedObject detected_obj;
detected_obj.label = mylabels[obj.class_label];
detected_obj.confidence = obj.confidence;
detected_obj.bbox = cv::Rect(obj.left, obj.top, obj.right - obj.left, obj.bottom - obj.top);
detected_obj.center = cv::Point(obj.left + (obj.right - obj.left) / 2, obj.top + (obj.bottom - obj.top) / 2); // 计算中心点
detected_objects.push_back(detected_obj);uint8_t b, g, r;
tie(b, g, r) = yolo::random_color(obj.class_label);
cv::rectangle(image, cv::Point(obj.left, obj.top), cv::Point(obj.right, obj.bottom),
cv::Scalar(b, g, r), 5);auto caption = cv::format("%s %.2f", detected_obj.label.c_str(), detected_obj.confidence);
int width = cv::getTextSize(caption, 0, 1, 2, nullptr).width + 10;
cv::rectangle(image, cv::Point(obj.left - 3, obj.top - 33),
cv::Point(obj.left + width, obj.top), cv::Scalar(b, g, r), -1);
cv::putText(image, caption, cv::Point(obj.left, obj.top - 5), 0, 1, cv::Scalar::all(0), 2, 16);// 绘制中心点
cv::circle(image, detected_obj.center, 5, cv::Scalar(255, 255, 255), -1);
}// 输出检测到的目标信息
cout << "Detected objects in image " << img_path << ":" << endl;
for (const auto& obj : detected_objects) {
cout << "Class: " << obj.label << ", Confidence: " << obj.confidence << endl;
cout << "Bounding Box: (" << obj.bbox.x << ", " << obj.bbox.y << ") - (" << obj.bbox.x + obj.bbox.width << ", " << obj.bbox.y + obj.bbox.height << ")" << endl;
cout << "Center: (" << obj.center.x << ", " << obj.center.y << ")" << endl;
}// 保存结果图像
string output_path = get_output_path(img_path, output_folder);
if (cv::imwrite(output_path, image)) {
cout << "Saved result to " << output_path << ", " << detected_objects.size() << " objects detected" << endl;
}
else {
cerr << "Error: Failed to save image to " << output_path << endl;
}return detected_objects.size(); // 返回检测到的目标数量
}// 主函数
int main() {
string img_folder = "E:/daima/YOLOv8_Tensorrt-zawu/images";
string model_path = "E:/daima/YOLOv8_Tensorrt-zawu/zawu.trt";
string output_folder = "outputs";
fs::create_directory(output_folder);int total_detected_objects = 0; // 总共检测到的目标数量
for (const auto& entry : fs::directory_iterator(img_folder)) {
if (entry.is_regular_file()) {
total_detected_objects += detect_objects(entry.path().string(), model_path, output_folder);
}
}cout << "Total detected objects: " << total_detected_objects << endl;
return 0;
}
以上代码主要添加的功能如下:
1.计算图像中心点并绘制
2.计算目标数量















 291
291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









