






VTD仿真介绍:VTD是用于创建、配置、仿真和评估虚拟环境的工具包,涉及到公路和轨道交通仿真。它被用于高级驾驶员辅助系统和自动驾驶系统的开发,同时也用作训练模拟器。它囊括了从三维虚拟世界的创建到复杂交通场景的仿真过程,包括了简单或者物理级传感器仿真。它应用于软件在环、驾驶员在环、车辆在环和硬件在环各阶段,并且可以和第三方或者客户自己的应用协同仿真。
1. 启动roscore
roscore2. 启动地图引擎
cd /桌面/tianjin_dpi/dpi_ros_apps-v0.0.0-ubuntu18-x86_64-20240126/bin
./run.sh3. 话题引擎监听
cd /桌面/catkin_execute
source install/setup.bash
rostopic echo /heartbeat_info4. 发布终点
cd /桌面
./pub_end_point.sh5. 启动VTD仿真
cd VIRES/cd VTD.2022.4/bin
./vtdStart.sh --select选择NationalCompetition(13)
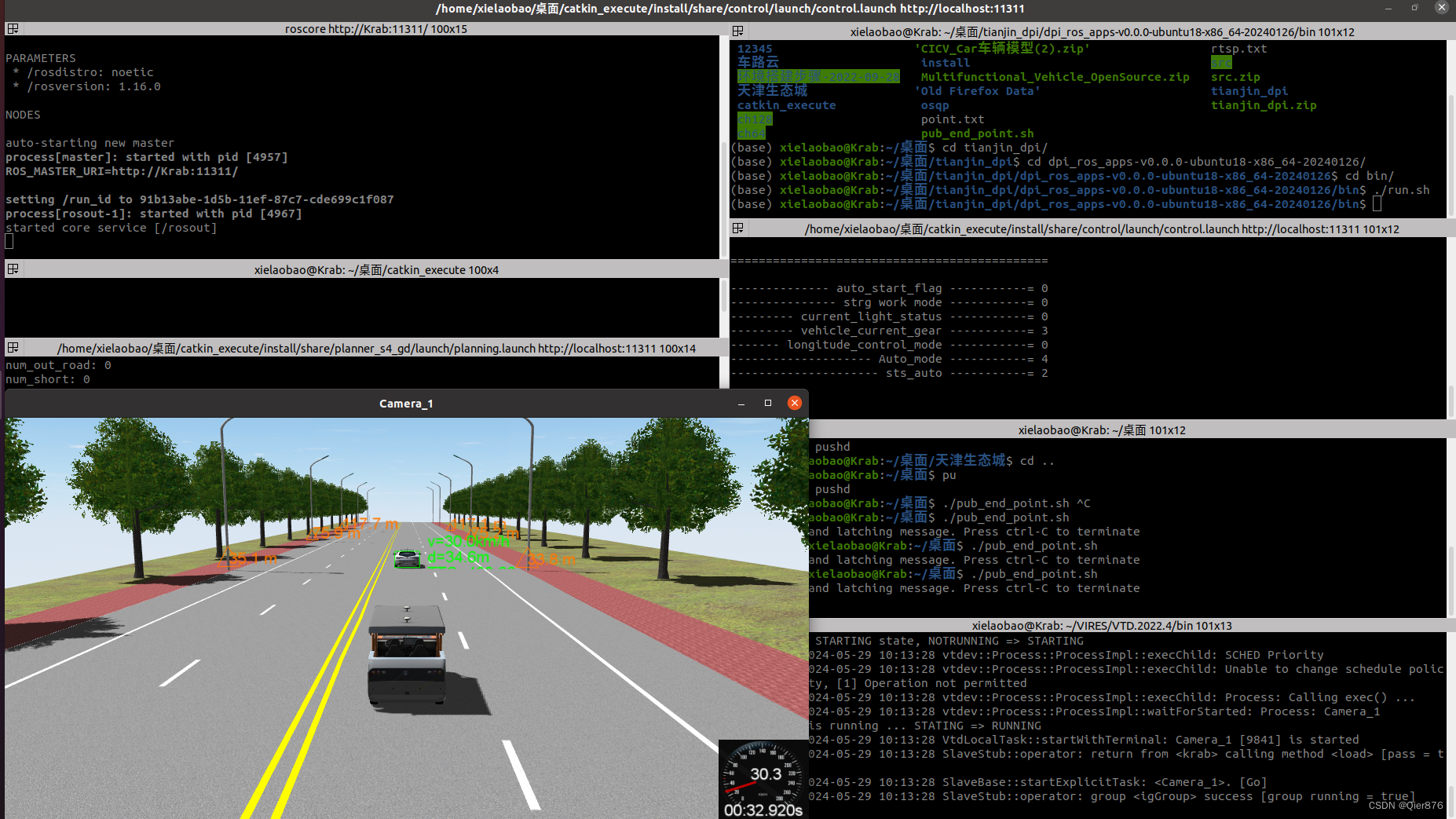
画面如下:
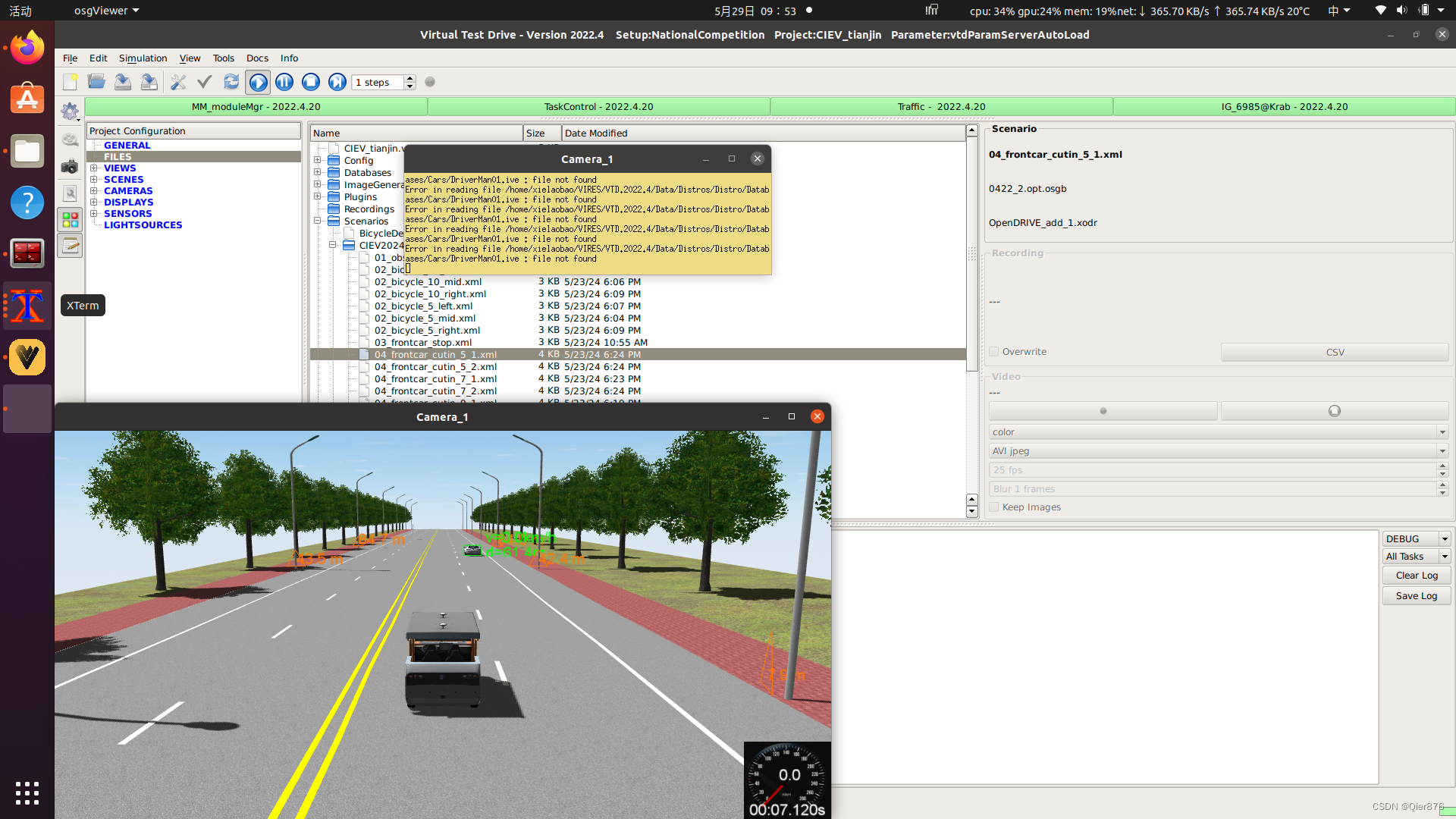
选择files-Scenarios-04_frontcar_cutin_5_1.xml
随后点击上面勾启动
显示如下画面即为启动成功
6. 启动vtd-ros连接器
cd /桌面/catkin_execute
source install/setup.bash
roslaunch vtdToRos vtdToRos.launch
cd /桌面/catkin_execute
source install/setup.bash
roslaunch rosToVtd rosToVtd.launch 7.查看ros话题
rostopic list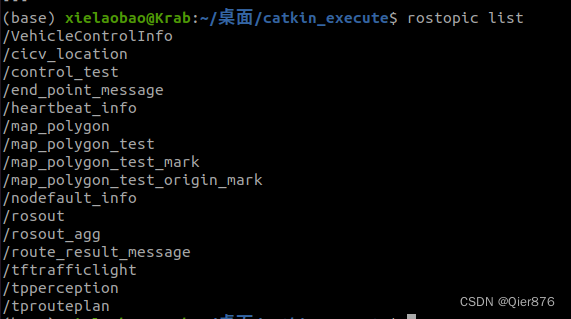
查看定位话题
rostopic echo /cicv_location8. 启动规划和控制
先重新发布终点
随后
source install/setup.bash
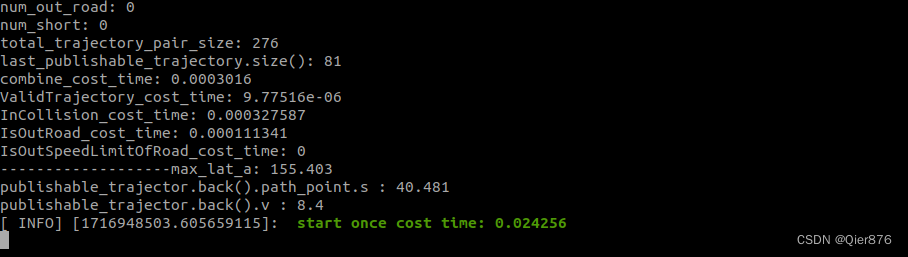
roslaunch planner_s4_gd planning.launch
结果如下
启动控制
source install/setup.bash
roslaunch control control.launch此时小车开始运动

















 2710
2710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









