







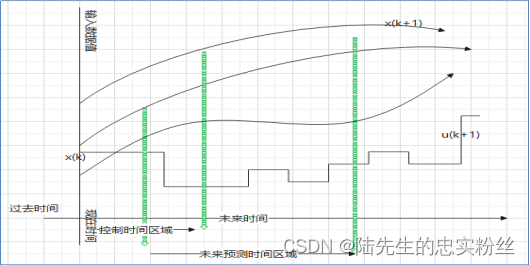
什么是PID模糊算法,指的是以误差值和误差变化作为输入值,利用其模糊规则进行推算,在本系统中,其算法的核心思想为将控制模型里的数据对象中的过去时间端的数值和未来时间段参数数值的输入,对未来某一时间段的预测范围进行推算出来。主要是通过利用当前时间与过去时间、现在时间与未来时间进行差值处理,得到其偏差值,即可对未来某一时间段的时间进行预测,这样一种的差值预测,在一定程度上有着减少误差的作用。
在下图中,x(k)表示为现在时间段的输入值,k+1表示为该智能农业管理系统在输入过程中设定的值,该值可以通过预测模型预测出结果值即为x(k+1)值。其中u(k+1为该智能农业管理系统的控制律,得到的差值为预测模型输入与输出值的偏差数据。
要想精准、误差小的获取到环境数据参数,最主要的是在设计一个可以预测的预测模糊PID控制器模型,以确保能够获取精准的数据信息,从而达到想要的效果。在该控制器模型的前提基础上设计可以预测的模糊控制器方案。通过调节该模糊控制器模型的参数,只需手动调节参数,从而使得系统推算出一套可以预测未来时刻温湿度、病虫害的方案。并且该预测功能模型只起到对未来时刻的预测,对控制器模型没有起到任何的控制作用,所以对农业智能管理系统的界面布局没有任何影响。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1519
1519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









