






转载:Stepper库 – 太极创客 (taichi-maker.com)
AccelStepper库 – 太极创客 (taichi-maker.com)
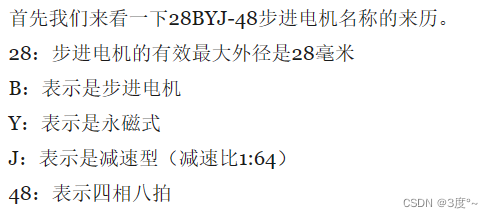
28BYJ-48步进电机认识和简单控制



//本示例程序使用Stepper库
#include <Arduino.h>
#include <Stepper.h>
// 定义电机控制用常量
// 电机内部输出轴旋转一周步数
const int STEPS_PER_ROTOR_REV = 32;
// 减速比
const int GEAR_REDUCTION = 64;
/*
* 转子旋转一周需要走32步。转子每旋转一周,电机输出轴只旋转1/64周。
* (电机内部配有多个减速齿轮,这些齿轮会的作用是让转子每旋转一周,
* 输出轴只旋转1/64周。)
* 因此电机输出轴旋转一周则需要转子走32X64=2048步,即以下常量定义。
*/
// 电机外部输出轴旋转一周步数 (2048)
// const是constant的简写,用来定义常量,它限定一个变量不允许被改变,产生静态作用。
const float STEPS_PER_OUT_REV = STEPS_PER_ROTOR_REV * GEAR_REDUCTION;
// 定义电机控制用变量
// 电机旋转步数
int StepsRequired;
// 建立步进电机对象
// 定义电机控制引脚以及电机基本信息。
// 电机控制引脚为 8,9,10,11
// 以上引脚依次连接在ULN2003 驱动板 In1, In2, In3, In4
Stepper steppermotor(STEPS_PER_ROTOR_REV, 8, 10, 9, 11);
void setup()
{
//setup函数内无内容
}
void loop()
{
// 极慢转动4步用于观察ULN2003电机驱动板LED变化
steppermotor.setSpeed(1);
StepsRequired = 4;
steppermotor.step(StepsRequired);
delay(1000);
// 慢速顺时针旋转一圈
StepsRequired = STEPS_PER_OUT_REV;
steppermotor.setSpeed(500);
steppermotor.step(StepsRequired);
delay(1000);
// 快速逆时针旋转一圈
StepsRequired = - STEPS_PER_OUT_REV;
steppermotor.setSpeed(800);
steppermotor.step(StepsRequired);
delay(2000);
}













 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









