







目录
一、实验目的
(1)掌握ULN2003AN驱动阵列的原理,熟悉驱动模块的使用;
(2)熟悉并理解步进电机的基本原理,熟悉步进电机的使用方法;
(3)掌握步进电机驱动电路的连接方法
(4)编写并测试步进电机控制程序
二、实验设备与环境
Arduino UNO套件、Arduino IDE、计算机、步进电机、ULN2003AN驱动模块等
三、实验重点
(1)步进实验电路连接;(2)步进电机驱动控制原理与使用方法;(3)步进电机控制程序编写
四、实验难点
(1)步进电机的程序控制
五、实验内容
5.1实验任务
任务描述:步进电机驱动电路搭建;步进电机驱动程序;步进电机角度控制、转速控制
5.2实验原理
1.步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,是打印机、绘图仪、机器人等设备的动力核心,应用极为广泛。
步进电机通过控制脉冲个数控制角位移达到准确定位,通过控制脉冲频率来控制步进电机转速和加速度达到调节和控制电机转速。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”或步进角,它的旋转是以转动固定角度一步一步运行的。步进电机在非超载情况下,电机转速、停止位置只取决于脉冲信号的频率和脉冲数,不受负载变化的影响。

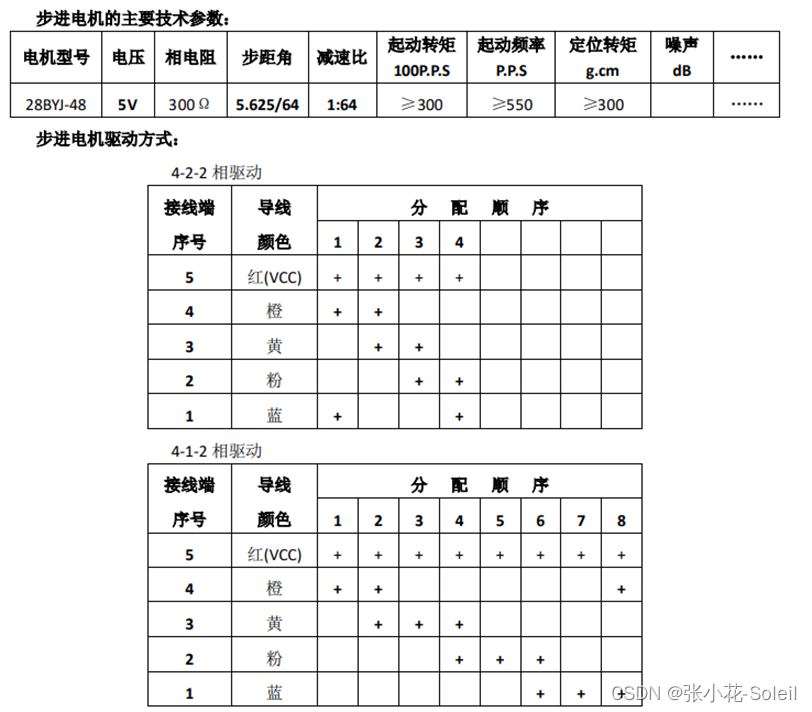
如图所示,采用4相5线连接的28BYJ48型4相8拍步进电机,是减速步进电机,减速比为1:64,步进角为5.625/64度,转动一圈需要360/(5.625/64) = 4096个脉冲信号。当对步进电机施加一系列连续不断的控制脉冲时,使步进电机连续不转地转动。每一个脉冲信号对应步进电机的某一项或两相绕组的通电状态改变一次,对应转子转过一个步进角,通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机通常有单4拍(A→B→C→D→A→„)、双4拍(AB→BC→CD→DA→AB→„)、8拍(A→AB→B→BC→C→CD→D→DA→A„)
2.Stepper 库函数
Stepper 是 Arduino 自带的库函数,用于控制步进电机。
头文件:#include<Stepper.h>
Stepper stepper(steps,pin1,pin2) //两相步进电机实例对象
Stepper stepper(steps,pin1,pin2,pin3,pin4) //四相步进电机实例对象
参数:steps,电机转一周需要的步数(脉冲数)&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1038
1038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











