







Ref:
理论:
- Flash Attention学习过程【详】解(已完成!)_哔哩哔哩_bilibili
- 神经网络量化与部署
- Flash Attention 为什么那么快?
- 关于KVCache
- 关于CUDA版本实现
- 论文
- 知乎
- 关于Transformer
- 关于3Pass-OnlineSoftmax
面经:
OnlineSoftmax
我把知乎的知识点进行了简单总结:
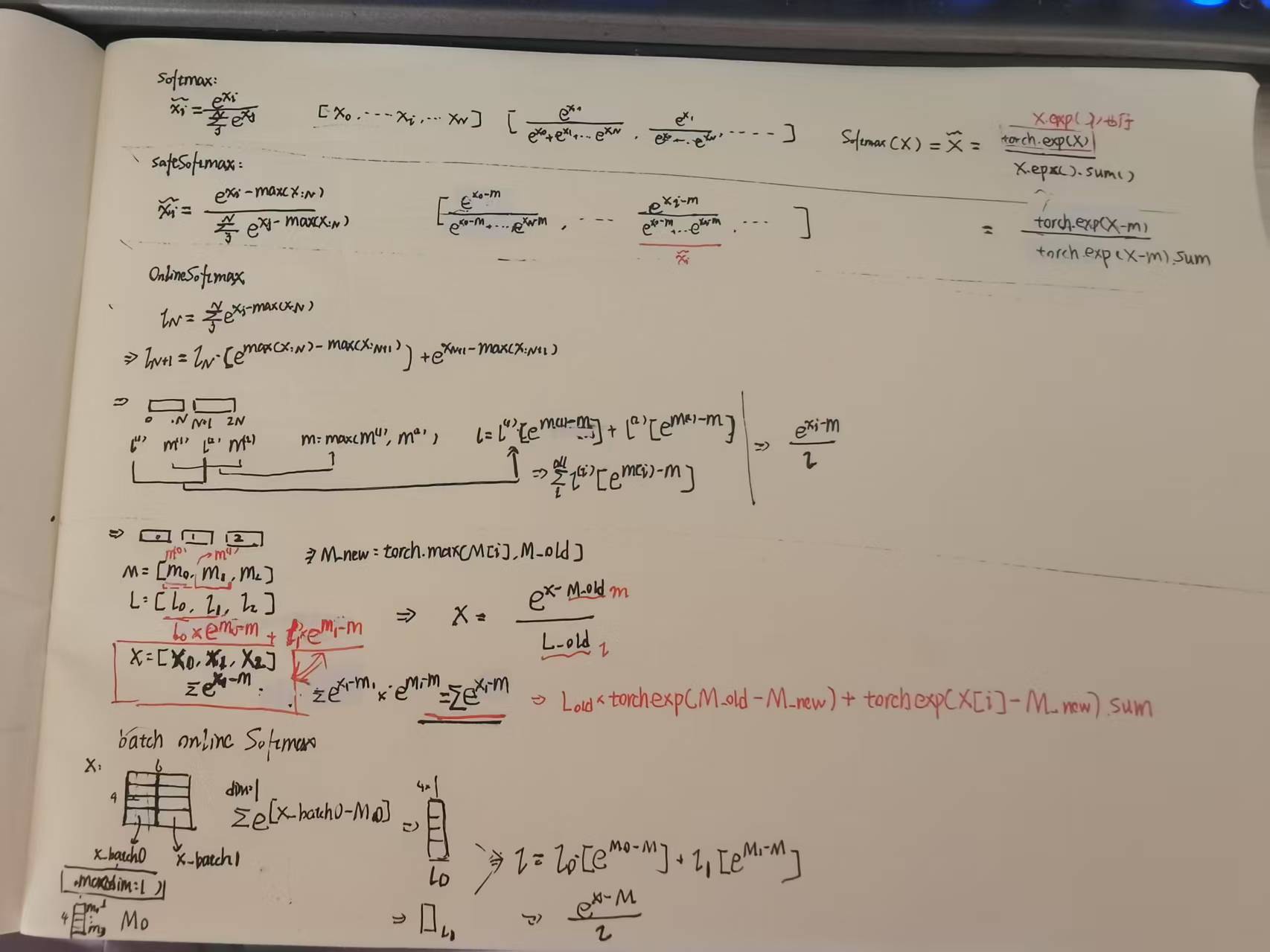
注意:
3个块的OnlineSoftmax的处理上,作者进行了一个顺便的推导和优化,我这里用原公式结果是一样的。
代码手撕
前文的学习代码实现如下:
import torch
print("==========1================")
X = torch.tensor([-0.3, 0.9, 0.5, 0.7, 0.1, 0.8])
X_sum_exp=X.exp().sum()
X_exp=X.exp()
X_exp1=torch.exp(X)
X_head=X_exp/X_sum_exp
X_head1=X_exp1/X_sum_exp
print(X_head1)
# print(X_exp)
# print(X_exp1)
print(X_head)
print("==========2================")
X_max=X.max()
X_sub=X-X_max
X_head_sub=torch.exp(X_sub)/torch.exp(X_sub).sum()
print(X_head_sub)
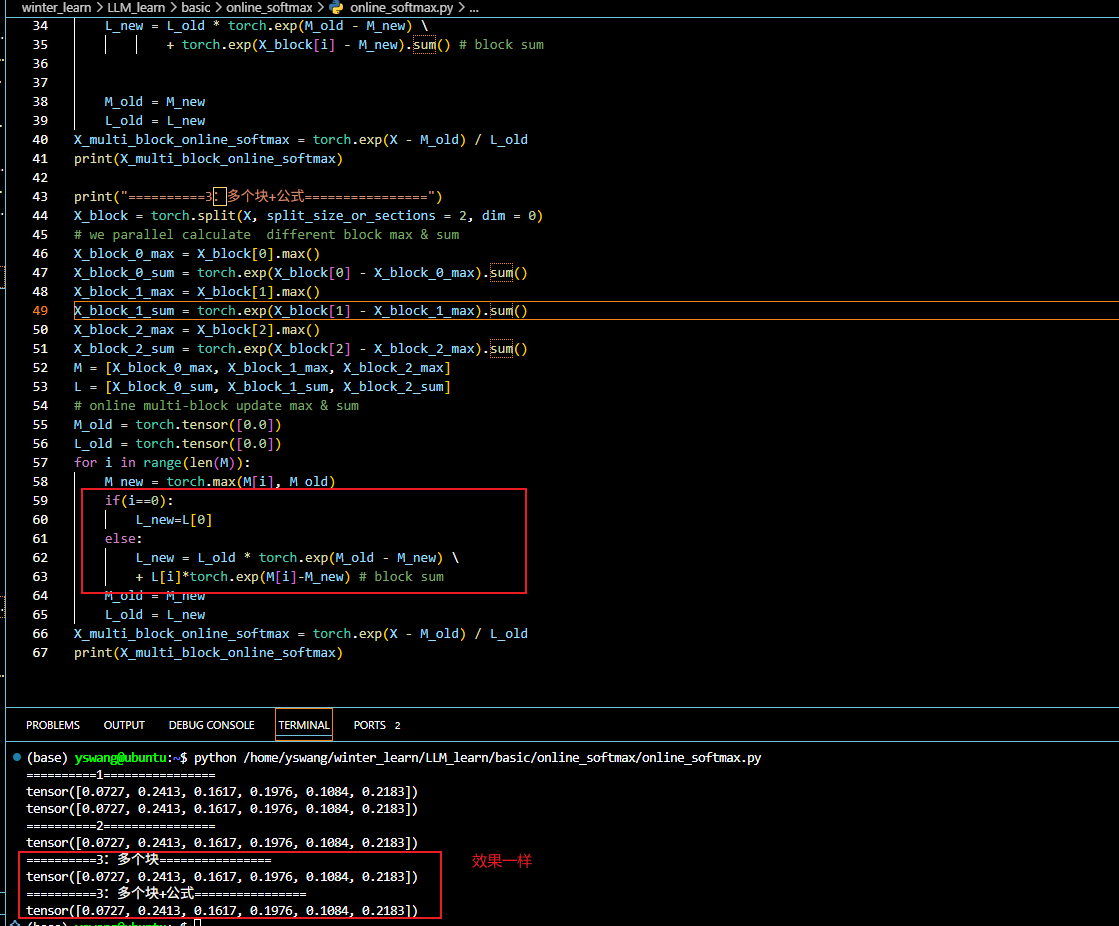
print("==========3:多个块================")
X_block = torch.split(X, split_size_or_sections = 2, dim = 0)
# we parallel calculate different block max & sum
X_block_0_max = X_block[0].max()
X_block_0_sum = torch.exp(X_block[0] - X_block_0_max).sum()
X_block_1_max = X_block[1].max()
X_block_1_sum = torch.exp(X_block[1] - X_block_1_max).sum()
X_block_2_max = X_block[2].max()
X_block_2_sum = torch.exp(X_block[2] - X_block_2_max).sum()
M = [X_block_0_max, X_block_1_max, X_block_2_max]
L = [X_block_0_sum, X_block_1_sum, X_block_2_sum]
# online multi-block update max & sum
M_old = torch.tensor([0.0])
L_old = torch.tensor([0.0])
for i in range(len(M)):
M_new = torch.max(M[i], M_old)
L_new = L_old * torch.exp(M_old - M_new) \
+ torch.exp(X_block[i] - M_new).sum() # block sum,因为这个是一个block的
M_old = M_new
L_old = L_new
X_multi_block_online_softmax = torch.exp(X - M_old) / L_old
print(X_multi_block_online_softmax)
print("==========3:多个块+公式================")
X_block = torch.split(X, split_size_or_sections = 2, dim = 0)
# we parallel calculate different block max & sum
X_block_0_max = X_block[0].max()
X_block_0_sum = torch.exp(X_block[0] - X_block_0_max).sum()
X_block_1_max = X_block[1].max()
X_block_1_sum = torch.exp(X_block[1] - X_block_1_max).sum()
X_block_2_max = X_block[2].max()
X_block_2_sum = torch.exp(X_block[2] - X_block_2_max).sum()
M = [X_block_0_max, X_block_1_max, X_block_2_max]
L = [X_block_0_sum, X_block_1_sum, X_block_2_sum]
# online multi-block update max & sum
M_old = torch.tensor([-1000.0])
L_old = torch.tensor([0.0])
for i in range(len(M)):
M_new = torch.max(M[i], M_old)
if(i==0):
L_new=L[0]
else:
L_new = L_old * torch.exp(M_old - M_new) \
+ L[i]*torch.exp(M[i]-M_new) # block sum
#比完后就成旧的了
M_old = M_new
L_old = L_new
X_multi_block_online_softmax = torch.exp(X - M_old) / L_old
print(X_multi_block_online_softmax)
print("==========4:2Pass-Online================")
M_old = torch.tensor([-1000.0])
L_old = torch.tensor([0.0])
O=torch.zeros(len(X))
for i in range(len(X)):
M_new=torch.max(X[i],M_old)
L_new=L_old*torch.exp(M_old-M_new)+torch.exp(X[i]-M_new)#不需要sum,因为就一个
M_old=M_new
L_old=L_new
for i in range(len(X)):
O[i]=torch.exp(X[i]-M_new)/L_new
# 用O=torch.exp(X-M_old)/L_old也行
print(O)
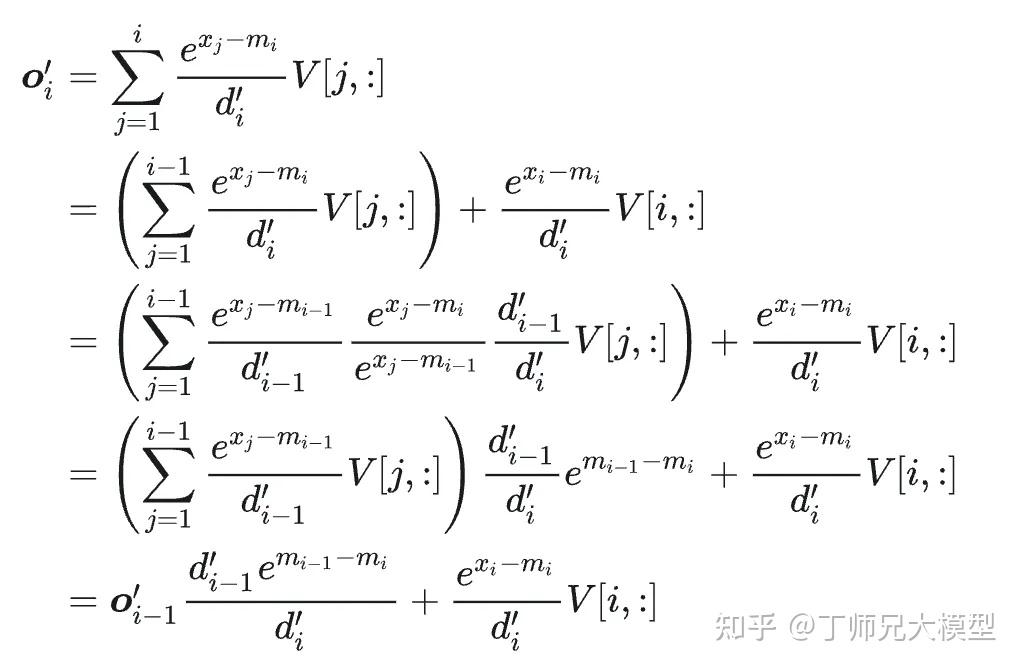
FlashAttention
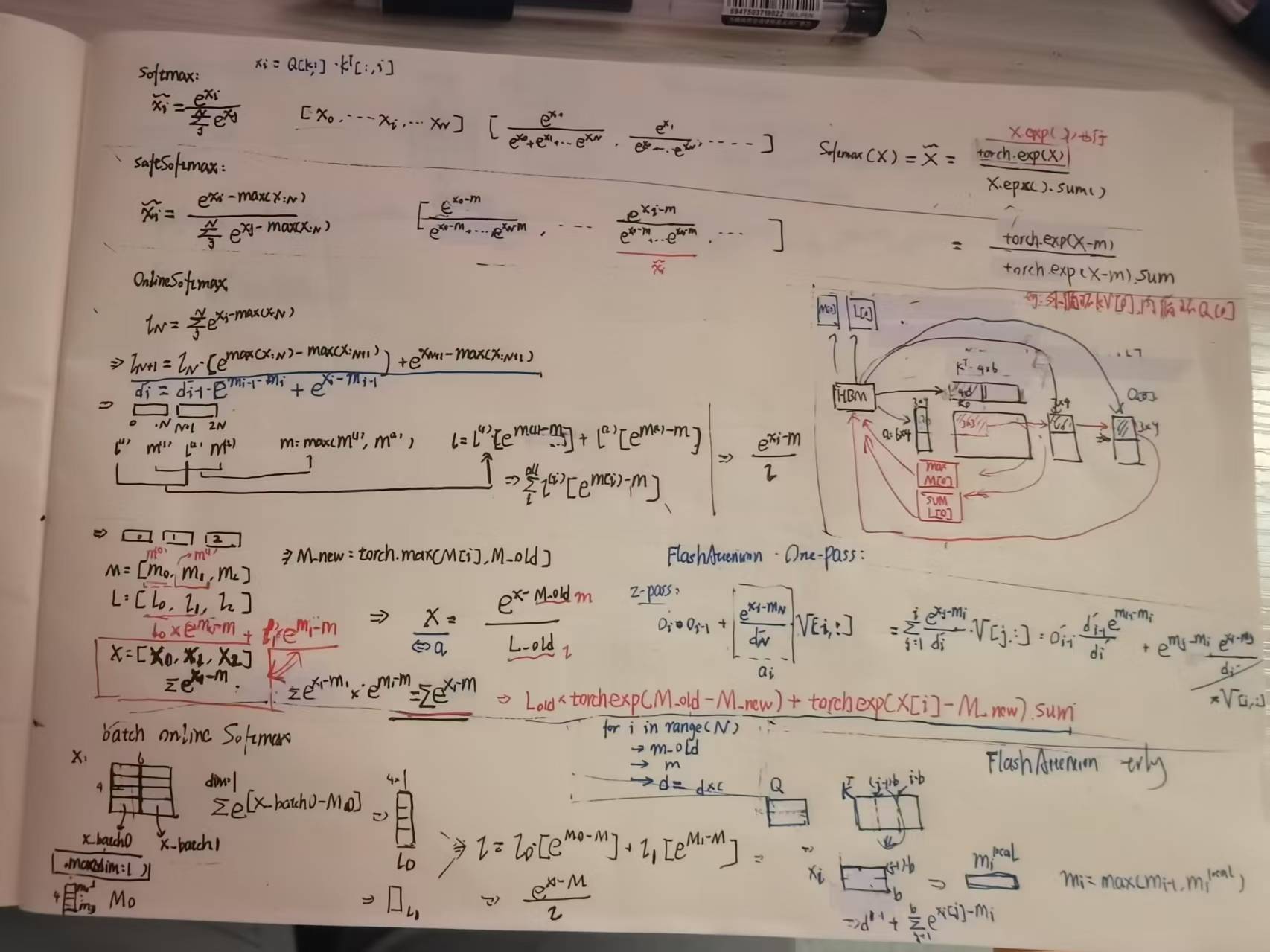
对照前面的OnlineMax和batch形式的SoftMax可以很容易推导出One-Pass形式的FlashAttention以及tiling形式的FlashAttention。基于上,便可以理解HBM和SRAM中KVCache是如何交换的了。
注意蓝笔部分,d即为之前的l,也即三个循环。基于这个可以推导出o也就是One-Pass的FlashAttention。
内存访问优化
如上,访存优化主要是针对Memory Bound。
CPU版本的FlashAttention实现可以算出 Q K T QK^T QKT也就相当于之前的X了,然后可以算出OnlineSoftMax然后和V计算。
不过之前推导了One-Pass形式,所以也可以用那个公式。
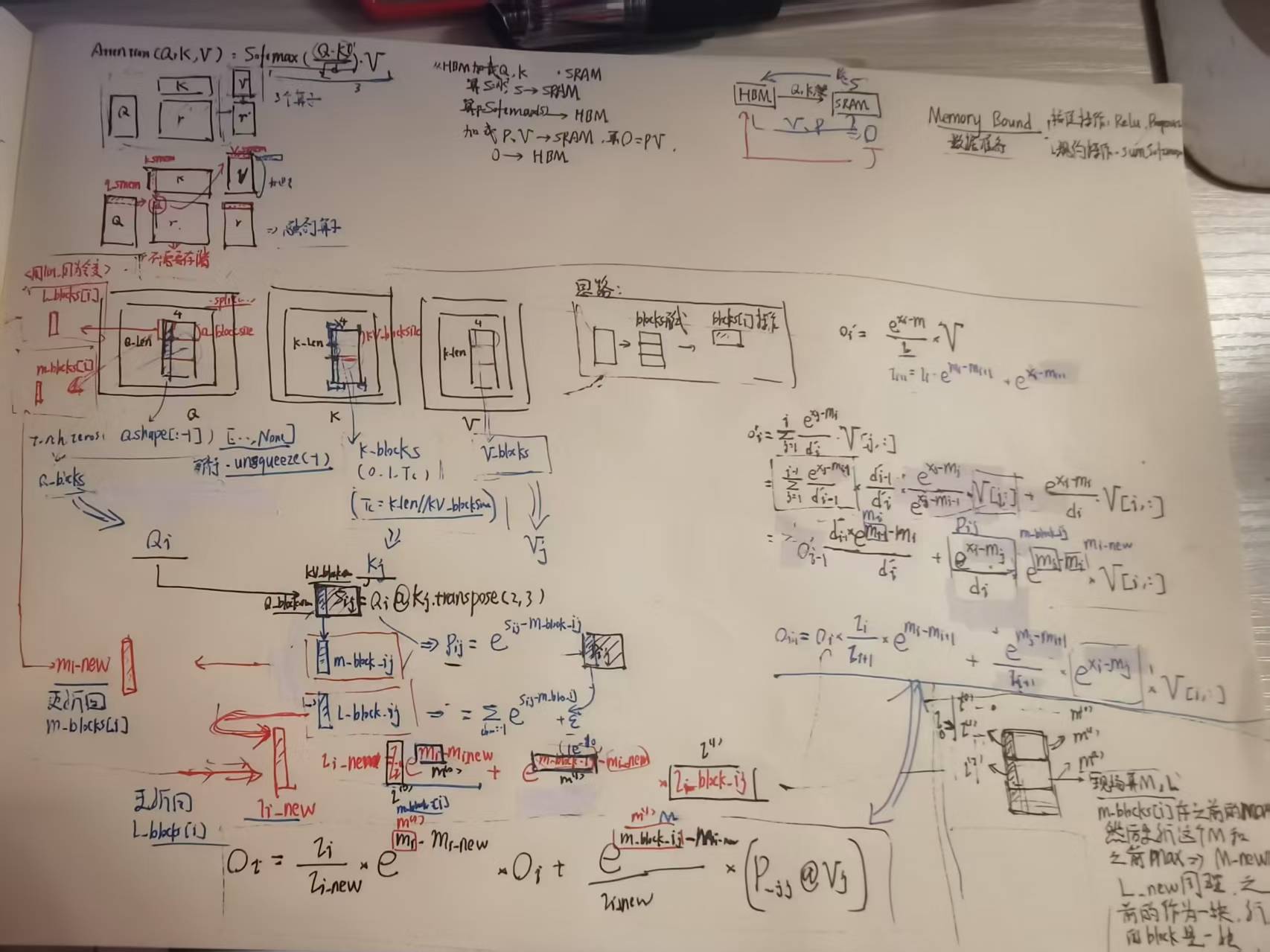
代码手撕
给出FlashAttention的CPU版本代码手撕
import torch
INF=-1e10
EPSILON=1e-8
Q_len=6
KV_len=8
Q_block_size=3
KV_block_size=2
Q=torch.randn(1,1,Q_len,4,requires_grad=True).to(device='cpu')
K=torch.randn(1,1,KV_len,4,requires_grad=True).to(device='cpu')
V=torch.randn(1,1,KV_len,4,requires_grad=True).to(device='cpu')
Tc=KV_len//KV_block_size
Tr=Q_len//Q_block_size
m=torch.ones(Q.shape[:-1])[...,None]*INF
l=torch.zeros(Q.shape[:-1])[...,None]
m_blocks=list(m.split(split_size=Q_block_size, dim=2))
l_blocks=list(l.split(split_size=Q_block_size, dim=2))
O=torch.zeros_like(Q,requires_grad=True)
Q_blocks=Q.split(split_size=Q_block_size, dim=2)
K_blocks=K.split(split_size=KV_block_size, dim=2)
V_blocks=V.split(split_size=KV_block_size, dim=2)
O_blocks=list(O.split(split_size=Q_block_size, dim=2))
for j in range(Tc):
K_j=K_blocks[j]
V_j=V_blocks[j]
for i in range(Tr):
Q_i=Q_blocks[i]
X=Q_i @ K_j.transpose(-2,-1)
M=X.max(dim=-1, keepdim=True).values
L=torch.exp(X-M).sum(dim=-1, keepdim=True)+EPSILON
P=torch.exp(X-M)
M_new= torch.maximum(m_blocks[i], M)
L_new=L*torch.exp(M-M_new)+torch.exp(m_blocks[i]-M_new)*l_blocks[i]
O_blocks[i]=(l_blocks[i]/L_new)*torch.exp(m_blocks[i]-M_new)*O_blocks[i] + torch.exp(M-M_new)/L_new*(P@V_j)
m_blocks[i]=M_new
l_blocks[i]=L_new
print(f'-----------Attn : Q{i}xK{j}---------')
# print(O_BLOCKS[i].shape)
print(O_blocks[0])
print(O_blocks[1])
print('\n')
print('-----------------Final O-----------------')
O=torch.cat(O_blocks, dim=2)
print(O)
print('-----------------Final O-----------------')
O = torch.softmax ( Q @ K.transpose(2,3), dim = -1) @ V
print(O)
面经
按 softmax 公式的计算有什么问题,在工程实现的时候怎么做的?
- 数值溢出->SafeSoftmax
你能够降低 softmax 的 GPU 访存复杂度吗?
- 第一,你知不知道 softmax 可以通过流式计算降低 GPU 访存复杂度。
- 第二,能否阐述一下流式计算的核心思想。
softmax 能做到流式计算,核心思想就是把 softmax 分母的计算做了一个优化,让它不依赖全局的最大值 m N m_N mN,而是依赖局部的最大值 m i m_i mi,这样就把前两个步骤合并成了一个。
所以最终我们可以借助 GPU 的 share memory 来存储中间结果,将上面的两步只用一个 kernel 实现,这样就只需要与 global memory 通信两次,一次写入数据,一次读取结果。
不过这里要注意,就是由于第二步的计算仍然需要依赖第一步计算的分母 d N d_N dN,所以还是需要两步,换句话说,不能做成 one pass。
既然 softmax 不能做到 one-pass,为什么 Flash Attention 可以,解释一下背后的核心思想?
- 核心思想是 Flash Attention 让 Attention 的所有计算都符合加法结合律,这样就可以充分利用 GPU 的并行优势,这是面试官希望我们答出的第一个点。
详细解释一下 Flash Attention 中的 tiling 策略?
- 知不知道什么是 tiling,为什么要使用它?以及使用之后有什么作用?其次在 Flash Attention 中的 tiling 策略是如何做的,能否说一下它的整个流程以及具体的效果?
FlashAttention 对 MQA 和 GQA 是怎么处理的?
- 一个关键词,就是 Indexing 思想。对于 MQA 和 GQA,FlashAttention 采用了 Indexing 的方式,而不是直接复制多份 KV Head 的内容到显存然后再进行计算。
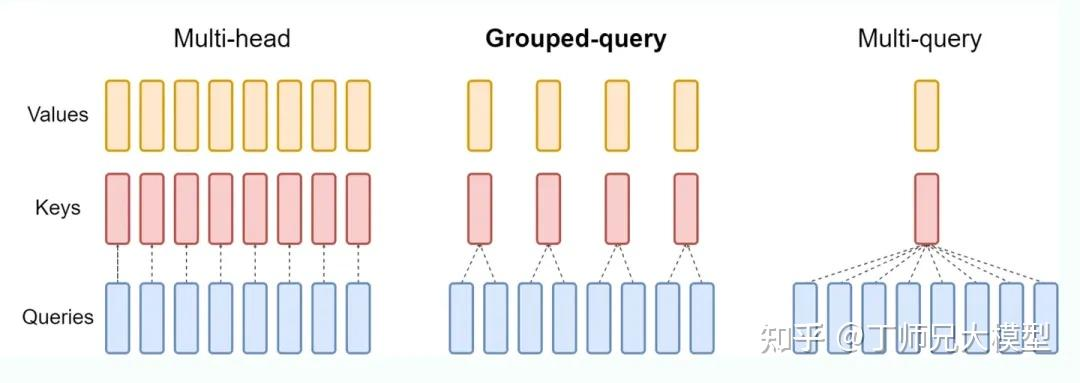
Indexing 的思想,就是通过传入 KV Head 索引到 GPU Kernel 中,然后根据内存地址,直接从内存中读取 KV。
vllm-FlashAttention源码
FlashAttentionBackend
class FlashAttentionBackend(AttentionBackend):
获取head_sizes等属性,继承自AttentionBackend作为后端。
注意:类似-> Type["FlashAttentionImpl"]的用法。
注意:
@staticmethod
def swap_blocks(
src_kv_cache: torch.Tensor,
dst_kv_cache: torch.Tensor,
src_to_dst: torch.Tensor,
) -> None:
src_key_cache = src_kv_cache[0]
dst_key_cache = dst_kv_cache[0]
ops.swap_blocks(src_key_cache, dst_key_cache, src_to_dst)
src_value_cache = src_kv_cache[1]
dst_value_cache = dst_kv_cache[1]
ops.swap_blocks(src_value_cache, dst_value_cache, src_to_dst)
用于交换KVCache中特定块。为什么这样做?(分别交换键缓存和值缓存?)
FlashAttentionMetadata
@dataclass
class FlashAttentionMetadata(AttentionMetadata):
其中:
seq_lens: Optional[List[int]] # 每个序列的总长度(列表形式)
seq_lens_tensor: Optional[torch.Tensor] # 序列长度的张量表示
max_prefill_seq_len: int # 预填充阶段的最大序列长度
max_decode_seq_len: int # 生成阶段的最大序列长度
context_lens_tensor: Optional[torch.Tensor] # 已计算的上下文长度(张量)

















 6214
6214

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









