







目录
一 ADC介绍
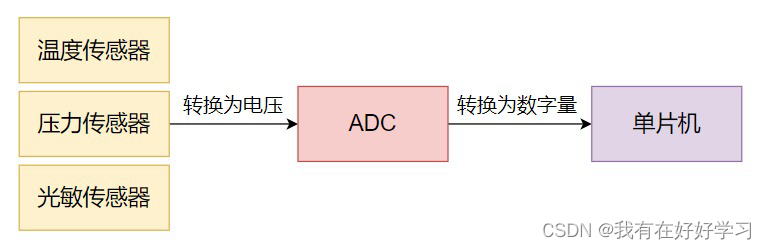
ADC是什么?
全称:Analog-to-Digital Converter,指模拟/数字转换器
ADC的性能指标
量程:能测量的电压范围
分辨率:ADC能辨别的最小模拟量,通常以输出二进制数的位数表示,比如:8、10、12、
16位等;位数越多,分辨率越高,一般来说分辨率越高,转化时间越长
转化时间:从转换开始到获得稳定的数字量输出所需要的时间称为转换时间
ADC特性
12位精度下转换速度可高达1MHZ
供电电压:V SSA :0V,V DDA :2.4V~3.6V
ADC输入范围:VREF- ≤ VIN ≤ VREF+
采样时间可配置,采样时间越长, 转换结果相对越准确, 但是转换速度就越慢
ADC 的结果可以左对齐或右对齐方式存储在 16 位数据寄存器中
ADC通道
总共2个ADC(ADC1,ADC2),每个ADC有18个转换通道: 16个外部通道、 2个内部通道(温度
传感器、内部参考电压)。

外部的16个通道在转换时又分为规则通道和注入通道,其中规则通道最多有16路,注入通道最多有4路。
规则组:正常排队的人;
注入组:有特权的人(军人、孕妇)
ADC转换顺序
每个ADC只有一个数据寄存器,16个通道一起共用这个寄存器,所以需要指定规则转换通道的转换顺序。
规则通道中的转换顺序由三个寄存器控制:SQR1、SQR2、SQR3,它们都是32位寄存器。SQR寄存器控制着转换通道的数目和转换顺序,只要在对应的寄存器位SQx中写入相应的通道,这个通道就是第x个转换。

和规则通道转换顺序的控制一样,注入通道的转换也是通过注入寄存器来控制,只不过只有一个
JSQR寄存器来控制,控制关系如下:

注入序列的转换顺序是从JSQx[ 4 : 0 ](x=4-JL[1:0])开始。只有当JL=4的时候,注入通道的转换顺序才会按照JSQ1、JSQ2、JSQ3、JSQ4的顺序执行。
ADC触发方式
1. 通过向控制寄存器ADC-CR2的ADON位写1来开启转换,写0停止转换。
2. 也可以通过外部事件(如定时器)进行转换。
ADC转化时间
ADC是挂载在APB2总线(PCLK2)上的,经过分频器得到ADC时钟(ADCCLK),最高 14MHz。
转换时间=采样时间+12.5个周期
12.5个周期是固定的,一般我们设置 PCLK2=72M,经过 ADC 预分频器能分频到最大的时钟只能是 12M,采样周期设置为 1.5 个周期,算出最短的转换时间为 1.17us。
ADC转化模式
扫描模式
关闭扫描模式:只转换ADC_SQRx或ADC_JSQR选中的第一个通道
打开扫描模式:扫描所有被ADC_SQRx或ADC_JSQR选中的所有通道
单次转换/连续转换
单次转换:只转换一次
连续转换:转换一次之后,立马进行下一次转换
二 ADC实验
实验一:使用ADC读取烟雾传感器的值
CubeMX配置

代码实现
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_ADC_Start(&hadc1); //启动ADC单次转换
HAL_ADC_PollForConversion(&hadc1, 50); //等待ADC转换完成
smoke_value = HAL_ADC_GetValue(&hadc1); //读取ADC转换数据
printf((const char *)"smoke_value = %f\r\n", 3.3/4096 * smoke_value);
//printf((const char *)"smoke_value = %f \r\n", smoke_value);
HAL_Delay(500);
}
/* USER CODE END 3 */实验二:旋钮电位器控制舵机角度
首先按180度采集出数值打印到串口
然后开启PWM输出给舵机
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//根据输入的角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
/* USER CODE BEGIN 1 */
uint8_t pwm_value;
uint8_t i = 0;
/* USER CODE END 1 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_ADC_Start(&hadc1); //启动ADC单次转换
HAL_ADC_PollForConversion(&hadc1, 50); //等待ADC转换完成
pwm_value = (uint8_t)(HAL_ADC_GetValue(&hadc1) / (4096.00/181.00)); //读取ADC转换数据
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, Angle(pwm_value));
HAL_Delay(10);
i++;
if(i >= 50)
{
printf((const char *)"pwm_value = %d\r\n",pwm_value);
i = 0;
}
}
/* USER CODE END 3 */















 2427
2427











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









