









目录
一、队列
1.什么是队列?
队列又称消息队列,是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息。
为什么不使用全局变量?
如果使用全局变量,任务1修改了变量 a ,等待任务3处理,但任务3处理速度很慢,在处理数据的过程中,任务2有可能又修改了变量 a ,导致任务3有可能得到的不是正确的数据。
在这种情况下,就可以使用队列。任务1和任务2产生的数据放在流水线上,任务3可以慢慢一个个依次处理。
关于队列的几个名词:
队列项目:队列中的每一个数据;
队列长度:队列能够存储队列项目的最大数量;
创建队列时,需要指定队列长度及队列项目大小。
2.队列特点
1. 数据入队出队方式
通常采用 先进先出(FIFO)的数据存储缓冲机制,即先入队的数据会先从队列中被读取。
也可以配置为后进先出(LIFO)方式,但用得比较少。
2. 数据传递方式
采用实际值传递,即将数据拷贝到队列中进行传递,也可以传递指针,在传递较大的数据的时候
采用指针传递。
3. 多任务访问
队列不属于某个任务,任何任务和中断都可以向队列发送/读取消息
4. 出队、入队阻塞
当任务向一个队列发送消息时,可以指定一个阻塞时间,假设此时当队列已满无法入队。
阻塞时间如果设置为:
0:直接返回不会等待;
0~port_MAX_DELAY:等待设定的阻塞时间,若在该时间内还无法入队,超时后直接返回不
再等待;
port_MAX_DELAY:死等,一直等到可以入队为止。出队阻塞与入队阻塞类似;
3.队列相关 API 函数
1. 创建队列
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength,UBaseType_t uxItemSize );参数:
uxQueueLength:队列可同时容纳的最大项目数 。
uxItemSize:存储队列中的每个数据项所需的大小(以字节为单位)。
返回值:
如果队列创建成功,则返回所创建队列的句柄 。 如果创建队列所需的内存无法分配 ,
则返回 NULL。
2. 写队列
写队列总共有以下几个函数:
| 函数 | 描述 |
| xQueueSend() | 往队列的尾部写入消息 |
| xQueueSendToBack() | 同 xQueueSend() |
| xQueueSendToFront() | 往队列的头部写入消息 |
| xQueueOverwrite() | 覆写队列消息(只用于队列长度为 1 的情况) |
| xQueueSendFromISR() | 在中断中往队列的尾部写入消息 |
| xQueueSendToBackFromISR() | 同 xQueueSendFromISR() |
| xQueueSendToFrontFromISR() | 在中断中往队列的头部写入消息 |
| xQueueOverwriteFromISR() | 在中断中覆写队列消息(只用于队列长度为 1 的情况) |
BaseType_t xQueueSend(QueueHandle_t xQueue,const void * pvItemToQueue,
TickType_t xTicksToWait);参数:
xQueue:队列的句柄,数据项将发送到此队列。
pvItemToQueue:待写入数据
xTicksToWait:阻塞超时时间
返回值:
如果成功写入数据,返回 pdTRUE,否则返回 errQUEUE_FULL。
3. 读队列
读队列总共有以下几个函数:
| 函数 | 描述 |
| xQueueReceive() | 从队列头部读取消息,并删除消息 |
| xQueuePeek() | 从队列头部读取消息,但是不删除消息 |
| xQueueReceiveFromISR() | 在中断中从队列头部读取消息,并删除消息 |
| xQueuePeekFromISR() | 在中断中从队列头部读取消息 |
BaseType_t xQueueReceive(QueueHandle_t xQueue,void *pvBuffer,
TickType_t xTicksToWait);参数:
xQueue:待读取的队列
pvItemToQueue:数据读取缓冲区
xTicksToWait:阻塞超时时间
返回值:
成功返回 pdTRUE,否则返回 pdFALSE。
4.实操
实验需求
创建一个队列,按下 KEY1 向队列发送数据,按下 KEY2 向队列读取数据。
cubeMX配置
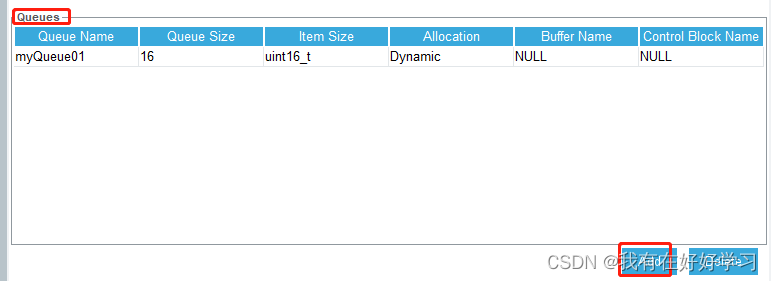
生成的代码:创建队列
/* Create the queue(s) */
/* definition and creation of myQueue01 */
osMessageQDef(myQueue01, 16, uint16_t);
myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);代码实现
设置容量16,则可以写入最多16次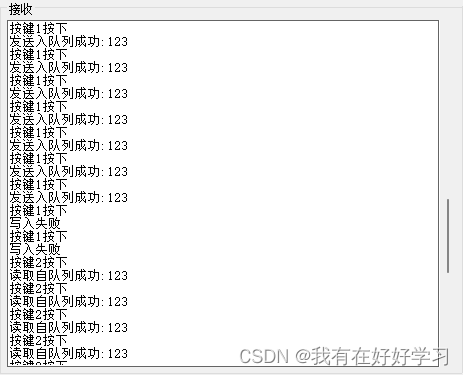
/* USER CODE BEGIN Header_Start_sendTask */
/**
* @brief Function implementing the sendTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_sendTask */
void Start_sendTask(void const * argument)
{
/* USER CODE BEGIN Start_sendTask */
static uint16_t buf = 123;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
printf("按键1按下\r\n");
status = xQueueSend(myQueue01Handle,&buf,0);
if(status == pdTRUE)
printf("发送入队列成功:%d\r\n",buf);
else
printf("写入失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_sendTask */
}
/* USER CODE BEGIN Header_Start_receiveTask */
/**
* @brief Function implementing the receiveTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_receiveTask */
void Start_receiveTask(void const * argument)
{
/* USER CODE BEGIN Start_receiveTask */
static uint16_t buf;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
printf("按键2按下\r\n");
status = xQueueReceive(myQueue01Handle,&buf,0);
if(status == pdTRUE)
printf("读取自队列成功:%d\r\n",buf);
else
printf("读取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_receiveTask */
}二、二值信号量
1.什么是信号量?
信号量(Semaphore),是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代
码段不被并发调用。
信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用,然后我们的量还可以用来表示资源的数量,当我们的量只有0和1的时候,它就可以被称作二值信号量,只有两个状态,当我们的那个量没有限制的时候,它就可以被称作为计数型信号量。
信号量也是队列的一种。
2.什么是二值信号量?
二值信号量其实就是一个长度为1,大小为零的队列,只有0和1两种状态,通常情况下,我们用它来进行互斥访问或任务同步。
互斥访问:比如门钥匙,只有获取到钥匙才可以开门
任务同步:比如我录完视频你才可以看视频
3.二值信号量相关 API 函数
| 函数 | 描述 |
| xSemaphoreCreateBinary() | 使用动态方式创建二值信号量 |
| xSemaphoreCreateBinaryStatic() | 使用静态方式创建二值信号量 |
| xSemaphoreGive() | 释放信号量 |
| xSemaphoreGiveFromISR() | 在中断中释放信号量 |
| xSemaphoreTake() | 获取信号量 |
| xSemaphoreTakeFromISR() | 在中断中获取信号量 |
(1). 创建二值信号量
SemaphoreHandle_t xSemaphoreCreateBinary( void )参数:
无
返回值:
成功,返回对应二值信号量的句柄;
失败,返回 NULL 。
(2). 释放二值信号量
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )参数:
xSemaphore:要释放的信号量句柄
返回值:
成功,返回 pdPASS ;
失败,返回 errQUEUE_FULL 。
(3). 获取二值信号量
BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,TickType_t xTicksToWait );参数:
xSemaphore:要获取的信号量句柄
xTicksToWait:超时时间,0 表示不超时,portMAX_DELAY表示卡死等待;
返回值:
成功,返回 pdPASS ;
失败,返回 errQUEUE_FULL 。
4.实操
实验需求
创建一个二值信号量,按下 KEY1 则释放信号量,按下 KEY2 获取信号量。
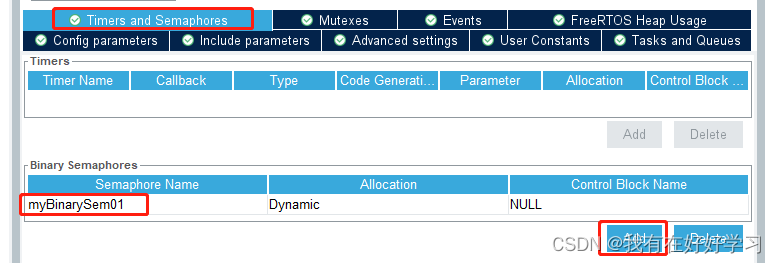
cubeMX配置
代码实现
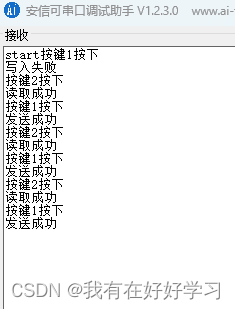
现象:本身以及有一个信号量被创建在里面了,所以第一次创建会失败
/* Create the semaphores(s) */
/* definition and creation of myBinarySem01 */
osSemaphoreDef(myBinarySem01);
myBinarySem01Handle = osSemaphoreCreate(osSemaphore(myBinarySem01), 1);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* USER CODE BEGIN Header_Start_sendTask */
/**
* @brief Function implementing the sendTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_sendTask */
void Start_sendTask(void const * argument)
{
/* USER CODE BEGIN Start_sendTask */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
printf("按键1按下\r\n");
if(xSemaphoreGive(myBinarySem01Handle) == pdTRUE)
printf("发送成功\r\n");
else
printf("写入失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_sendTask */
}
/* USER CODE BEGIN Header_Start_receiveTask */
/**
* @brief Function implementing the receiveTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_receiveTask */
void Start_receiveTask(void const * argument)
{
/* USER CODE BEGIN Start_receiveTask */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
printf("按键2按下\r\n");
if(xSemaphoreTake(myBinarySem01Handle, 0)== pdTRUE)
printf("读取成功\r\n");
else
printf("读取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_receiveTask */
}一直卡住:
xSemaphoreTake(myBinarySemHandle, portMAX_DELAY);七、计数型信号量
1.什么是计数型信号量?
计数型信号量相当于队列长度大于1 的队列,因此计数型信号量能够容纳多个资源,这在计数型
信号量被创建的时候确定的。
2.计数型信号量相关 API 函数
| 函数 | 描述 |
| xSemaphoreCreateCounting() | 使用动态方法创建计数型信号量。 |
| xSemaphoreCreateCountingStatic() | 使用静态方法创建计数型信号量 |
| uxSemaphoreGetCount() | 获取信号量的计数值 |
计数型信号量的释放和获取与二值信号量完全相同 !
SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount,
UBaseType_t uxInitialCount);参数:
uxMaxCount:可以达到的最大计数值
uxInitialCount:创建信号量时分配给信号量的计数值
返回值:
成功,返回对应计数型信号量的句柄;
失败,返回 NULL 。
3.实操
实验需求
创建一个计数型信号量,按下 KEY1 则释放信号量,按下 KEY2 获取信号量。
cubeMX配置
将 Config parameters 标签里的 USE_COUNTING_SEMAPHORES 设置为 Enabled 。
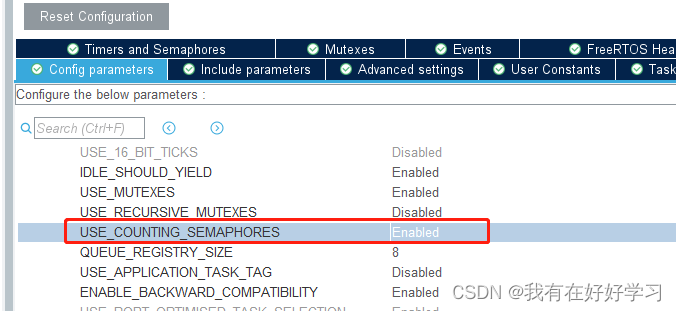
可自行设置数量
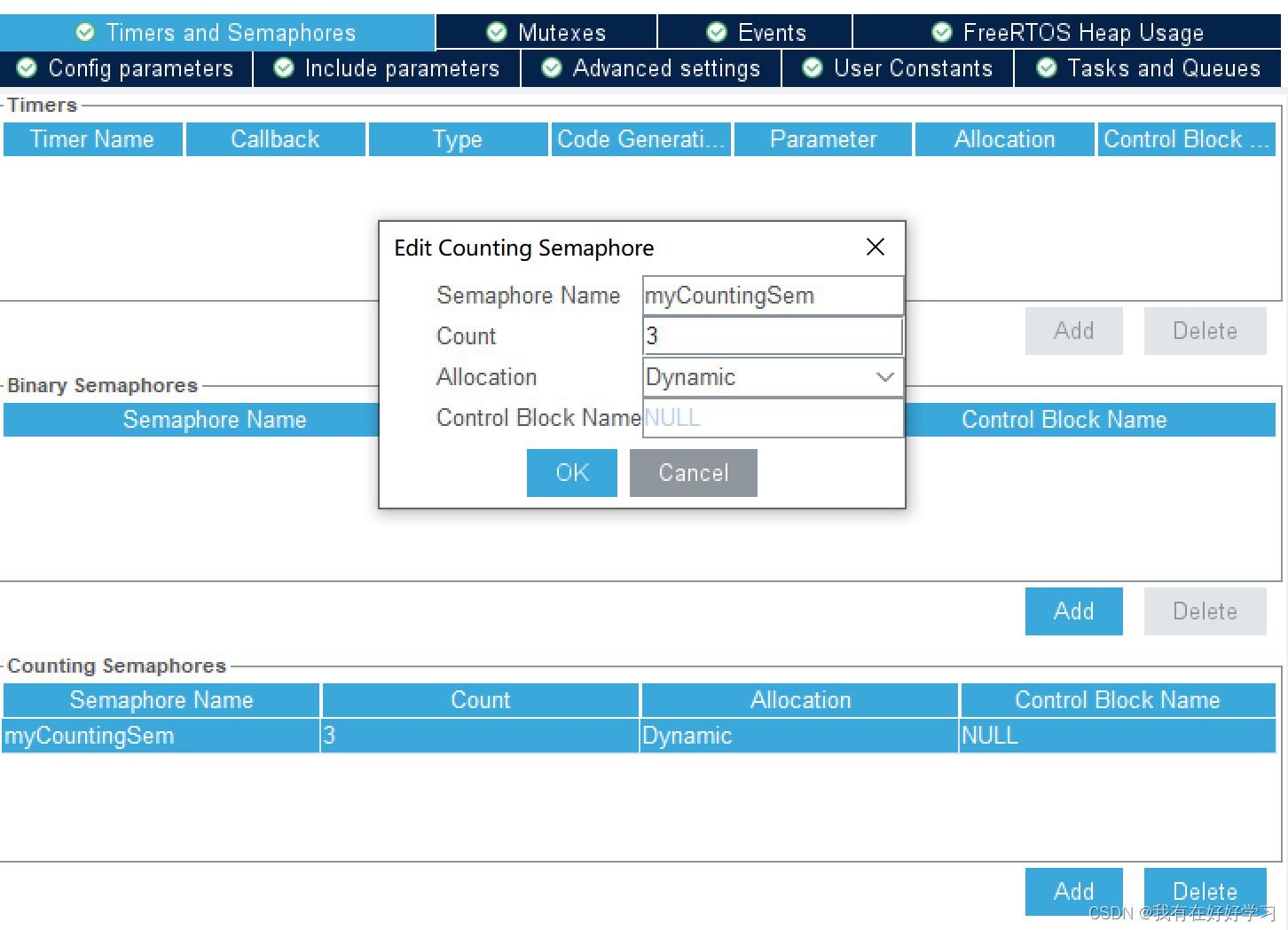
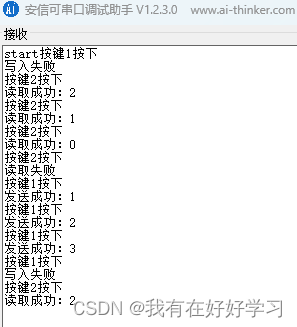
代码实现
初始已经存在三个值了。
同样0换成portMAX_DELAY也可以卡住
/* Create the semaphores(s) */
/* definition and creation of myCountingSem01 */
osSemaphoreDef(myCountingSem01);
myCountingSem01Handle = osSemaphoreCreate(osSemaphore(myCountingSem01), 3);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* USER CODE BEGIN Header_Start_sendTask */
/**
* @brief Function implementing the sendTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_sendTask */
void Start_sendTask(void const * argument)
{
/* USER CODE BEGIN Start_sendTask */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
printf("按键1按下\r\n");
if(xSemaphoreGive(myCountingSem01Handle) == pdTRUE)
printf("发送成功:%d\r\n",(int)uxSemaphoreGetCount(myCountingSem01Handle));
else
printf("写入失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_sendTask */
}
/* USER CODE BEGIN Header_Start_receiveTask */
/**
* @brief Function implementing the receiveTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_receiveTask */
void Start_receiveTask(void const * argument)
{
/* USER CODE BEGIN Start_receiveTask */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(10);//防抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
printf("按键2按下\r\n");
if(xSemaphoreTake(myCountingSem01Handle, 0)== pdTRUE)
printf("读取成功:%d\r\n",(int)uxSemaphoreGetCount(myCountingSem01Handle));
else
printf("读取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END Start_receiveTask */
}八、互斥量
1.什么是互斥量?
在多数情况下,互斥型信号量和二值型信号量非常相似,但是从功能上二值型信号量用于同步,而互斥型信号量用于资源保护。
互斥型信号量和二值型信号量还有一个最大的区别,互斥型信号量可以有效解决优先级反转现
象。
2.什么是优先级翻转?
以上图为例,系统中有3个不同优先级的任务H/M/L,最高优先级任务H和最低优先级任务L通过信号量机制,共享资源。目前任务L占有资源,锁定了信号量,Task H运行后将被阻塞,直到TaskL释放信号量后,Task H才能够退出阻塞状态继续运行。但是Task H在等待Task L释放信号量的过程中,中等优先级任务M抢占了任务L,从而延迟了信号量的释放时间,导致Task H阻塞了更长时间,这种现象称为优先级倒置或反转。
优先级继承:当一个互斥信号量正在被一个低优先级的任务持有时, 如果此时有个高优先级的任务也尝试获取这个互斥信号量,那么这个高优先级的任务就会被阻塞。不过这个高优先级的任务会将低优先级任务的优先级提升到与自己相同的优先级。
优先级继承并不能完全的消除优先级翻转的问题,它只是尽可能的降低优先级翻转带来的影响。
3.互斥量相关 API 函数
互斥信号量不能用于中断服务函数中!
| 函数 | 描述 |
| xSemaphoreCreateMutex() | 使用动态方法创建互斥信号量。 |
| xSemaphoreCreateMutexStatic() | 使用静态方法创建互斥信号量。 |
SemaphoreHandle_t xSemaphoreCreateMutex( void )参数:
无
返回值:
成功,返回对应互斥量的句柄;
失败,返回 NULL 。
4.实操
实验需求
1. 演示优先级翻转
2. 使用互斥量优化优先级翻转问题
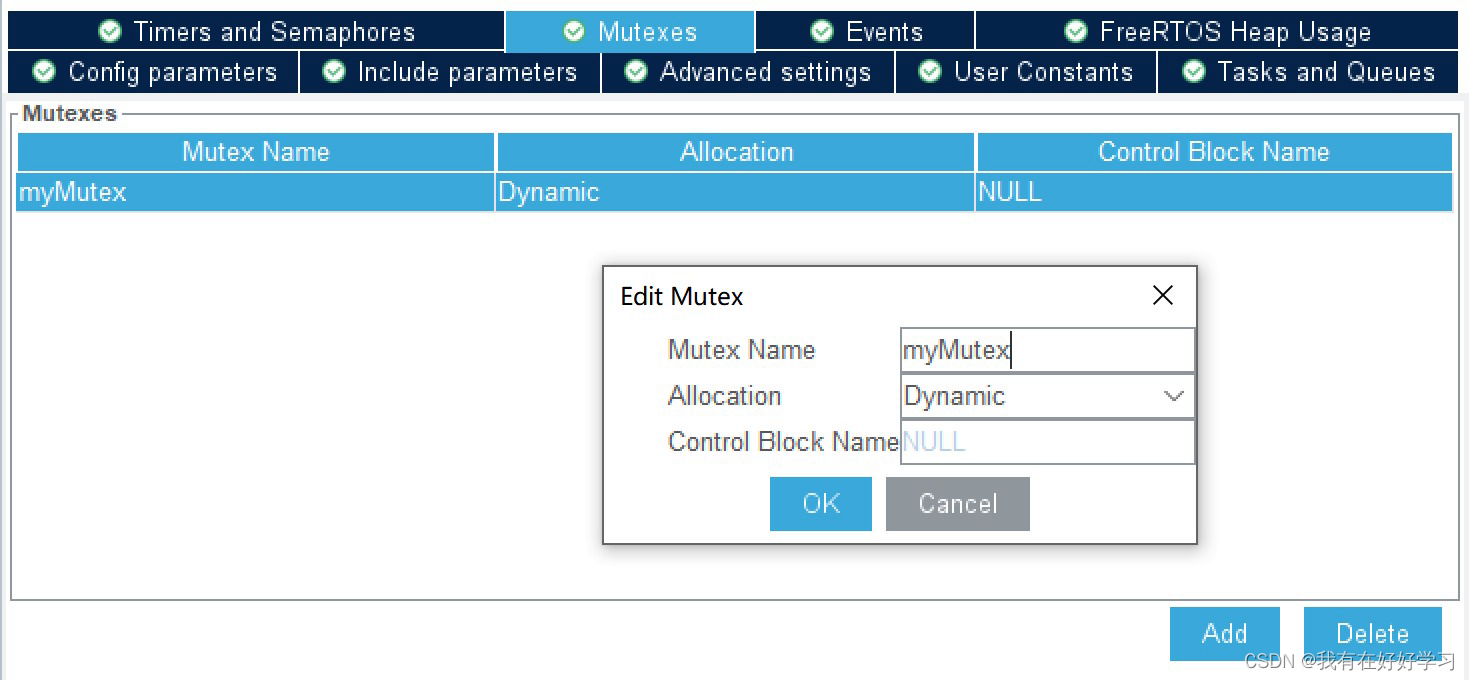
cubeMX配置
代码实现
不使用互斥量
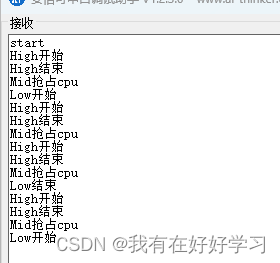
使用互斥量
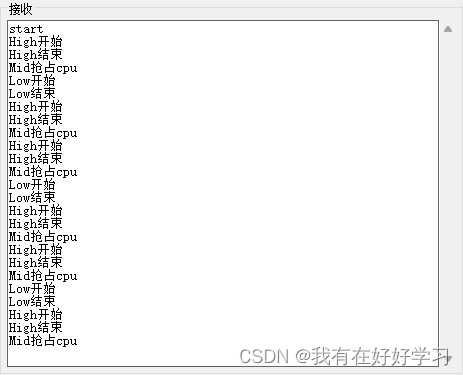
/* definition and creation of myMutex01 */
osMutexDef(myMutex01);
myMutex01Handle = osMutexCreate(osMutex(myMutex01));
/* USER CODE BEGIN RTOS_MUTEX */
/* USER CODE BEGIN Header_Start_sendTask */
/**
* @brief Function implementing the sendTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_sendTask */
void Start_sendTask(void const * argument)
{
/* USER CODE BEGIN Start_sendTask */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myMutex01Handle, portMAX_DELAY);
printf("High开始\r\n");
HAL_Delay(1000);
printf("High结束\r\n");
xSemaphoreGive(myMutex01Handle);
osDelay(1000);
}
/* USER CODE END Start_sendTask */
}
/* USER CODE BEGIN Header_Start_receiveTask */
/**
* @brief Function implementing the receiveTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_receiveTask */
void Start_receiveTask(void const * argument)
{
/* USER CODE BEGIN Start_receiveTask */
/* Infinite loop */
for(;;)
{
printf("Mid抢占cpu\r\n");
osDelay(1000);
}
/* USER CODE END Start_receiveTask */
}
/* USER CODE BEGIN Header_StartTask03 */
/**
* @brief Function implementing the Low thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask03 */
void StartTask03(void const * argument)
{
/* USER CODE BEGIN StartTask03 */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myMutex01Handle, portMAX_DELAY);
printf("Low开始\r\n");
HAL_Delay(3000);
printf("Low结束\r\n");
xSemaphoreGive(myMutex01Handle);
osDelay(1000);
}
/* USER CODE END StartTask03 */
}














 940
940











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









