






引言:
这次我利用树莓派4B做一个对红色小球追踪实验的简单版,后面可能还会有终版。下面我会一一讲解一下我的具体思路以及实现流程,所涉及到的硬件或者软件的知识在这里面我可能不会谈得很多,如果大家有不理解或者我说的有错误的地方也可以互相交流。
硬件环境:
树莓派4B。
16路PCA9685PWM波驱动板。
一个USB摄像头。
两个sg90舵机,一个充当X轴,一个充当Y轴。
软件环境:
编译软件MobaXterm
下载OpenCV环境到树莓派
安装PCA9685驱动包到树莓派(注意这里下载的时候一定要用pip3下载,将环境下载的与python环境同目录,不然会因为找不到相关文件而报错。具体细节也可以看一下其它博主的文章)
实现过程:
一、图像处理
1.通过摄像头,利用OpenCV实时获取视频流并能够对视频流进行处理,得到我们想要的画面与数据。
2.由于我是要追踪红色的小球,所以可以利用HSV颜色空间利用确定红色阈值对视频进行二值化处理,将红色部分作为白色也就是像素为255非红色部分作为黑色也就是像素为0。
HSV个颜色阈值给各位放下面了: 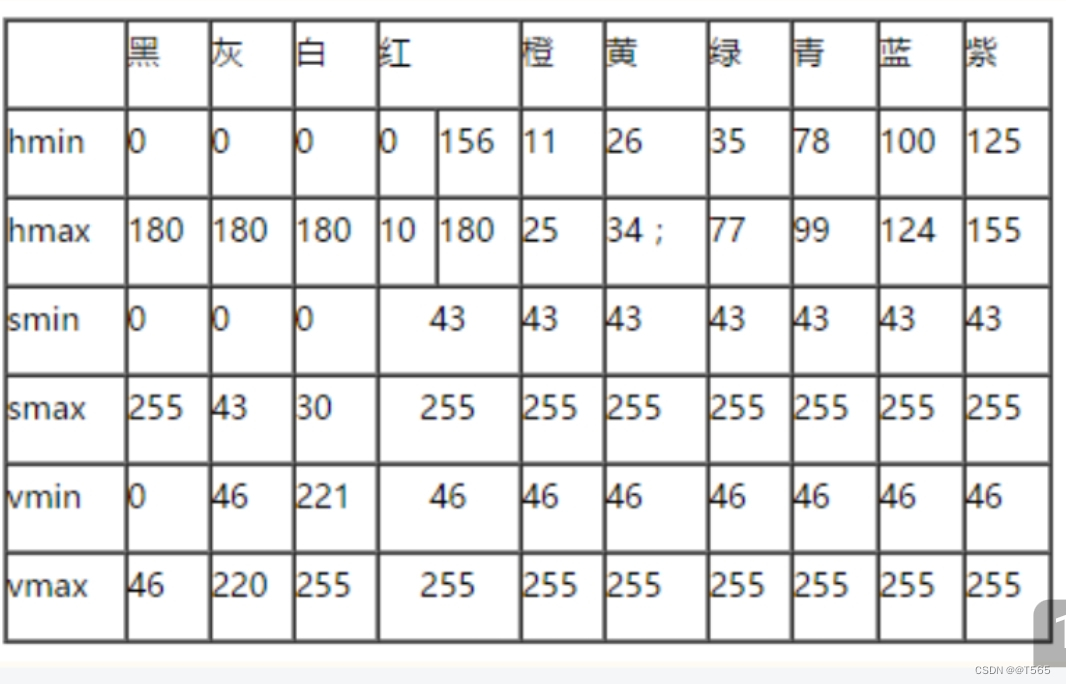
3.二值化完毕后可以遍历整个视频流(整个视频流可以看做是一个640*480的二维矩阵)通过堆像素的索引值得到全部的小球像素点,再利用他们在视频流中的位置折算成坐标。最后利用质心算法求出小球的质心,确定小球的中心坐标记为x,y。
代码如下:
import cv2
import numpy as np
from time import sleep
cap = cv2.VideoCapture(0)
while cap.isOpened():
ret,frame = cap.read()
img_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 确定红色阈值
low_rea = np.array([156, 43, 46])
upper_red = np.array([180, 255, 255])
img_mask = cv2.inRange(img_hsv, low_rea, upper_red) # 建立掩膜
height,width = img_mask.shape[:2] # 得到视频流矩阵宽度与高度
sum_x = 0
sum_y = 0
count = 0
# 求质心,非常简单且暴力的一个算法
for y in range(width):
for x in range(height):
if img_mask[x,y] > 0:
sum_x += x
sum_y += y
count += 1
cX,cY = 0,0
# 找出质心坐标
if count > 0:
cX = int(sum_x/count)
cY = int(sum_y/count)
# 在原图中画一个圆圈出质心
cv2.circle(frame,(cX,cY),100,(20,100,150),2)
# cv2.imshow("img_mask",img_mask)
cv2.imshow("fram",frame)
# time.sleep(1)
if cv2.waitKey(5) & 0x00FF == ord('q'):
cv2.imwrite('tt', frame)
break
cap.release()
cv2.destroyAllWindows()二、控制舵机跟随小球的移动而转动
1.由于以及求出了小球的质心坐标,并且分别将横纵坐标记为了x,y。所以我们可以将两个坐标轴对应的值,分别折算成角度,分别给两个舵机,一个控制x轴的方向,一个控制y轴的方向。那么如何将视频流的值折算成角度呢????个人认为,因为OpenCV的视频流为640*480的矩阵,并且sg90舵机的角度是从0~180,所以我们可以利用比例来求角度。比如:X轴对应的是看即为640,所以它对应的角度为(x/640)*180。同理可得y轴对应的角度为y/480*180。这样便也就实现了坐标到角度的转换。
2.将角度得到后,由于sg90是用的PWM波来控制转动角度,所以还需要利用公式将角度计算成PWM波。
代码如下:
# -*- coding: utf-8 -*-
# Import the PCA9685 module.
from __future__ import division
import time
import Adafruit_PCA9685
def set_servo_angle(channel, angle): # 使用时将角度传入,调用该函数
date = int(4096 * ((angle * 11) + 500) / 20000) # 将角度计算成pwm
pwm.set_pwm(channel, 0, date)
#print(f"pca{f}")
return date
# PCA9685的通道
channel1 = 0
channel2 = 1
pwm = Adafruit_PCA9685.PCA9685()
pwm.set_pwm_freq(50)三、优化
1.由于一个Opencv视频流矩阵是640*480的为矩阵。这也就意味着,在对视频实时处理的时候,直接通过粗暴的去便利所有像素值去求质心它的时间复杂度为O(N*M)本身数据量并不是很大,但是由于是一直在处理,加上还要将数据通过USB实时传输,本身还是比较慢的。如果直接用上面的代码的话,运行你就会发现视频流很卡,舵机的相应也不是很及时。对此我们要对其进行优化,我有想到了两张优化方案。
第一种:在对视频流的数据进行处理的时候,可以考虑多进程,同时开两个进程对视频的数据流进行处理,得到质心坐标。当然,这样的方法对于这样的小项目而言本身肯定是可以的,但是进程本身也是对CPU资源的占用,所以一般情况下个人认为还是要从其他方面下手。
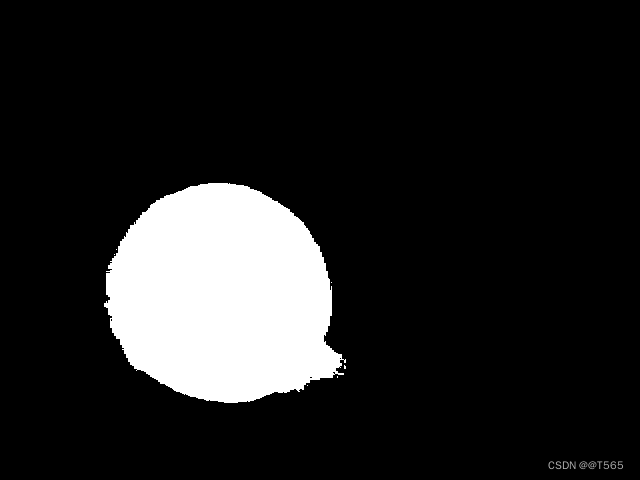
第二种:优化算法。由于小球有颜色,有形状。本身我们也只需要二值化过后有颜色的像素,对此我们可以对他进行轮廓检测+边缘处理直接得到小球在视频流中的像素,直接遍历他们这样时间复杂度会大大减小,如果小球不大,或者小球距离摄像头很远,那么时间复杂度将会小于O(N)。就算是最坏的情况也会比之前的O(N*M)小很多。
如图所示(边上不规则的地方是我的手指,轮廓提取和颜色识别相对于还是比较准确的):
效果展示:
OpenCV视频效果: 
横向转动如下:
竖直转动如下:
两者并不是分开转动的,是一起转动的可以达到跟踪的目的。
最后缺陷分析:
1.摄像头没有固定在舵机上面,固定在舵机上面摄像头会随着舵机的转动而转动,这样环境一改变,摄像头的抖动就会便严重。对此个人认为可以加入PID算法,提高精确度,减少抖动。
2.由于是HSV颜色空间+边缘化轮廓处理,所以环境的颜色以及物体的形状对它还是有一定的干扰,对此也可以进行优化,可以考虑训练一个模型。
整合后代码:
主文件:
import cv2
import numpy as np
import time
import Position_pid as Pid
import PCA as pca
cap = cv2.VideoCapture(0)
# PCA9685的通道
channel1 = 0
channel2 = 1
pca.set_servo_angle(channel1, 0)
pca.set_servo_angle(channel2, 0)
cx = [0,0]
cy = [0,0]
while cap.isOpened():
ret, frame = cap.read()
# 转化为颜色空间根据颜色空间的颜色阈值进行二值化
img_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 确定红色阈值
low_rea = np.array([150, 43, 46])
upper_red = np.array([180, 255, 255])
# 创建掩膜
img_mask = cv2.inRange(img_hsv, low_rea, upper_red)
contours,hierarchy = cv2.findContours(img_mask,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE) # 边缘检测,RETR_EXTERNAL:提取物体边缘轮廓。CHAIN_APPROX_NONE:存储所有轮廓点
"""
contours_data = [[[int(x) for x in point[0]] for point in contour] for contour in contours]
sum_x = 0
sum_y = 0
count = 0
index = -1
for i in range(len(contours)):
n = len(contours[i])
if index < n < len(contours):
index = n
for j in range(len(contours[i])):
for x,y in contours[i][j]:
sum_x += x
sum_y += y
count += 1
cX, cY = 0, 0
if count > 0:
cX = int(sum_x / count)
cY = int(sum_y / count)
"""
area = []
for contour in contours:
a = cv2.contourArea(contour, True)
area.append(abs(a))
cX, cY = 0, 0
index = -1
if len(area) > 0: # 如果提取到轮廓,并计算出面积
if max(area) > 10: # 设置一个阈值,避免干扰信息
index = area.index(max(area)) # 获取最大面积的索引
M = cv2.moments(contours[index]) # 最大轮廓 求矩
cX = int(M['m10'] / M['m00']) # 求轮廓的 x 坐标
cY = int(M['m01'] / M['m00']) # 求轮廓的 y 坐标
cv2.circle(frame, (cX, cY), 40, (20, 100, 150), 2)
x = (cX/640)*180
y = (cY/480)*180
cx[1],cx[0] = x,cx[1]
cy[1],cy[0] = y,cy[1]
cv2.circle(frame, (cX, cY), 40, (20, 100, 150), 2)
#pid = Pid.PIDController(0.5,0.1,0.2,setpoint=640)
#derct = pid.update((cX//640)*(1/18)+2.5)
pca.set_servo_angle(channel2, y)
pca.set_servo_angle(channel1, x)
"""
if abs(cx[0]-cx[1]) >= 5:
f = pca.set_servo_angle(channel1, x)
print(f"1:{f}")
if abs(cy[0]-cy[1]) >= 5:
f = pca.set_servo_angle(channel2, y)
print(f"2:{f}")
"""
dst = cv2.drawContours(frame, contours, contourIdx=index, color=(0, 255, 255), thickness=-3, lineType=cv2.LINE_AA)
if cv2.waitKey(5) & 0x00FF == ord('q'):
break
#cv2.imshow("frame",frame)
cv2.imshow("mask",img_mask)
#time.sleep(0.5)
cap.release()
cv2.destroyAllWindows()PWM驱动板文件:
# -*- coding: utf-8 -*-
# Import the PCA9685 module.
from __future__ import division
import time
import Adafruit_PCA9685
def set_servo_angle(channel, angle): # ÊäÈë½Ç¶Èת»»³É12^¾«¶ÈµÄÊýÖµ
date = int(4096 * ((angle * 11) + 500) / 20000)
pwm.set_pwm(channel, 0, date)
#print(f"pca{f}")
return date
# PCA9685的通道
channel1 = 0
channel2 = 1
pwm = Adafruit_PCA9685.PCA9685()
pwm.set_pwm_freq(50)















 4139
4139











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











