











图4.11 ![]() 值的变化情况
值的变化情况
下面利用matlab定量绘制某一方向的![]() 值,由曲线可知
值,由曲线可知![]() 在距离相对较远时无限趋近某一常数,如下图所示,而今年灯壳的半径加上车身已超过30cm,是满足音源相对较远这一条件。因此可以用
在距离相对较远时无限趋近某一常数,如下图所示,而今年灯壳的半径加上车身已超过30cm,是满足音源相对较远这一条件。因此可以用![]() 唯一确定音源角度。
唯一确定音源角度。
分别记两组对角线上麦克风的距离差为距离差1和距离差2,通过matlab仿真可以进行论证,两组对角线麦克风的距离差的差(以下简称为距离差的差)在距离相对较远时无限趋近某一常数,该常数随着角度变化而发生改变,如下图。由于今年新版信标灯的灯壳半径加上车身已超过30cm,是满足这一条件的,在实际测试中距离差的差也确实是一个常数。为了防止近距离误判,也使用fm与麦克风互相关测出的距离进行限制。

图5.1 距离差的差随声源距离的变化

图5.2 不同角度下,距离差的差随声源距离的变化
下面将求解这一常数与声源角度的对应关系。仍然使用matlab仿真进行分析,结果如图5.2所示。图5.3则是智能车车模的实际测试验,用麦克风数据互相关算出的距离差、距离差的差与角度的关系。接收采用山外上位机,红线和蓝线分别为两组距离差,棕线为距离差的差,可以发现与matlab仿真结果基本保持了一致。

图5.3 距离差的差与声源角度的关系
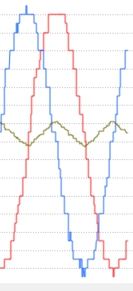
图5.4 麦克风互相关在tc264上的实际测试结果
由matlab仿真图不难分析出,虽然单独根据距离差的差不能推导出确定的声源角度,但如果结合两个距离差本身的正负进行辅助,只需要进行简单的分段线性变换,就可以很好的将距离差的差与声源角度一一对应起来。具体对应结果如图5.4,可以发现求解非常接近线性关系。由于比赛所用chrip信号的频率和tc264芯片算力和存储能力的限制,综合控制所需实时性的考量,我们最终选择了20khz的adc采样速率,理论上用该算法解算声源角度的分辨率为2.3度,误差在0.6度以内,完全满足智能车信标组比赛的要求。

图5.5 由距离差的差求解出声源角度
。
结论
本文分析了传统定位方法的优缺点,包括chan算法,三边测量方法等,这些方法虽然准确,但对时延精度要求较高,我们所使用的微控制器采样和处理能力无法达到要求。我们进而提出了适合本竞赛项目的简单定位算法,并使用matlab完成仿真,通过仿真证明了其合理性。之后进行实物进行测试,证实了该方法的定位精度能够满足要求,且实时性较好,能够在本竞赛项目中达到令人满意的定位效果。
参考文献:
[1]张铁成. 基于麦克风阵列的声音识别与定位算法研究[D].南京师范大学,2016.
[2]龚小章.特定声识别与定位系统[J].电子科技,2011,24(08):36-38+45.
[3]邹乐强.最小二乘法原理及其简单应用[J].科技信息,2010(23):282-283.
[4]韩毅,吴初娜,李龙飞.基于到达时差的声音定位系统的研究与实现[J].计算机工程与设计,2010,31(11):2462-2465.
[5]吴晓,靳世久,李一博,张鹏.基于麦克风阵列声音信号定位方法的研究[J].传感技术学报,2010,23(05):682-686.















 7077
7077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









