






串级控制
背景:江湖上,串级大法传闻已久,经年习之,因内力浅薄而未得其髓。近日,闲来无事,重拾此法练之,似有所得。。。

一、为何要串级控制?
简单PID控制再熟悉不过:
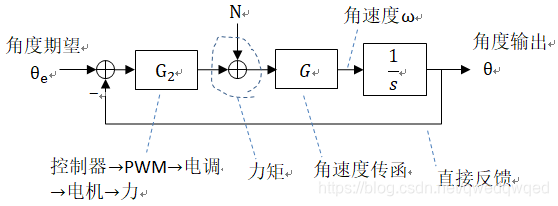
G2是所谓控制器,N是干扰,力矩作用于机身产生转动角速度,角速度积分得角度。G2用PID,当然平衡补偿力矩那些已经消除。
传函:
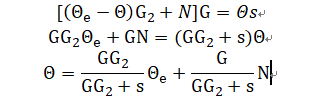
显然,输出由输入之一部和干扰之一部组成,二者增益比

K越大则Θ_e越明显,噪声N越不明显。是否串级控制表现更佳,又是何道理?
二、串级控制

同样研究传递函数
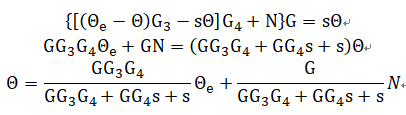
增益比

到这里《自动控制原理》上说通常满足

就完了,让人浮想联翩。
三、对比
拿四旋翼举例。按照通俗的控制变量法,让单级和串级的输入、噪声、系统响应都一样,都采用PD控制(单级参数为P和D,串级参数为P_1, D_1, P_2, D_2),来对比单级和串级的增益比。
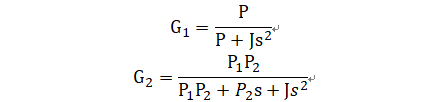
明确四旋翼从力矩到角速度的传递函数:

其中J是转动惯量;
单级(控制)对θ_e的传递函数:

串级对θ_e的传递函数:

然而无论如何也找不到P、D参数使得

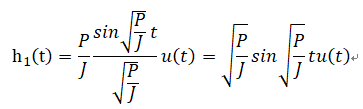
一度让人想用平方逼近让二者近似相等。。。但是考虑只P控制的情况马上就豁然开朗了:
显然根本不存在使他们相等的控制参数,更不用说PD的情况了。继续求出单位冲击响应:
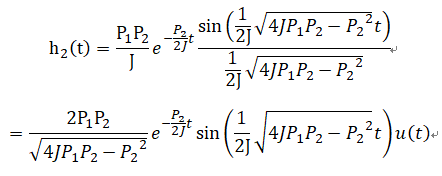
画出二曲线:
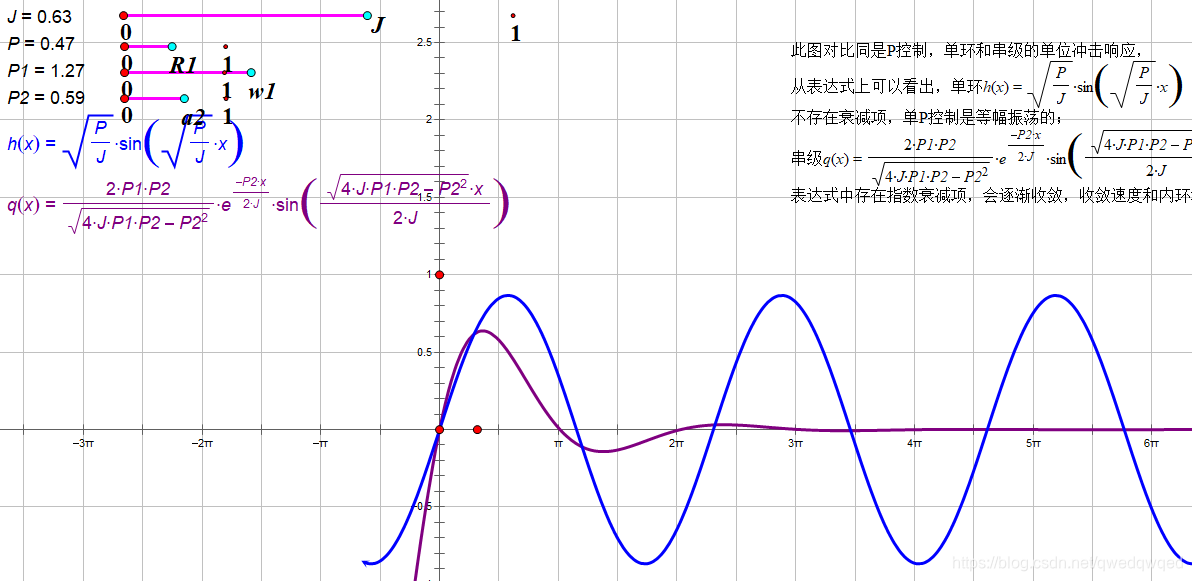
发现:单级控制之单位冲击响应无衰减项,为等幅振荡;而串级有指数衰减项,衰减速度与P_2有关,坚决印证这两个不可能相等,更不存在近似之可能。同样是P控制,看来串级生来就稳定。
再看控制框图,单级如果用PD,可以写出控制器输出的控制量

串级用P控制时控制器的输出量:

哇!这两个co可以说是一个模子里出来的了!单级控制量co仅比串级多了一项θ_e’D,即输入的导数项。这也是我经常不加思索写到程序中的控制方法。
之前听晨飞兄说:外环乘P直接给内环,也就是乘P得到角速度期望,内环用PD控制响应该期望即为内外环。根据之前推导的四旋翼位置控制的理解:姿态确定,位置一定是可以确定的;在此类似:角速度确定,姿态角度一定是确定的,只不过位置控制中姿态的意义很明显,可以一眼看穿,而角速度不易用肉眼看出。
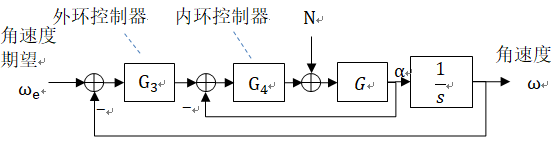
再思之,单环PD控制抛开θ_e’D就是串级P控制,为啥呢,外环微分就是内环变量,角度微分就是角速度;更进一步,内环角速度的PD还可以分解成以角速度为外环,角加速度为内环的串级P控制,如下图所示,也就是说全是P控制即可。
这样一说,比较单级和串级的噪声抑制比或控制效果就不能以同P或PD控制为准了。虽然单环PD等效于串级P,四旋翼有角速度传感器(陀螺仪)可用串级,但是角加速度就无传感器可测了,所以角速度控制用的PD控制,说明D控制项可以帮助我们深入到内部状态量不可测的时候;另一个问题是无处不在的干扰(噪声),D项是微分(实际控制中一般用差分)增益,噪声可能因微分作用而明显,导致控制效果差,这里可以把卡尔曼的噪声理论纳入进行透彻分析。
总结
一言蔽之:不存在孰优孰劣的问题,而是适合与否。

















 2340
2340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









