






MATLAB倒立摆仿真 simulink simscape
控制器 有文档
ID:6929668776709314
爱小马的海盐大傻
近年来,倒立摆仿真成为了控制系统领域中备受关注的热门话题。倒立摆仿真能够帮助工程师们更好地理解控制系统的原理,并且可以在减少实验成本的同时提高实验效率。而MATLAB倒立摆仿真则是其中最常用且最受欢迎的仿真工具之一。
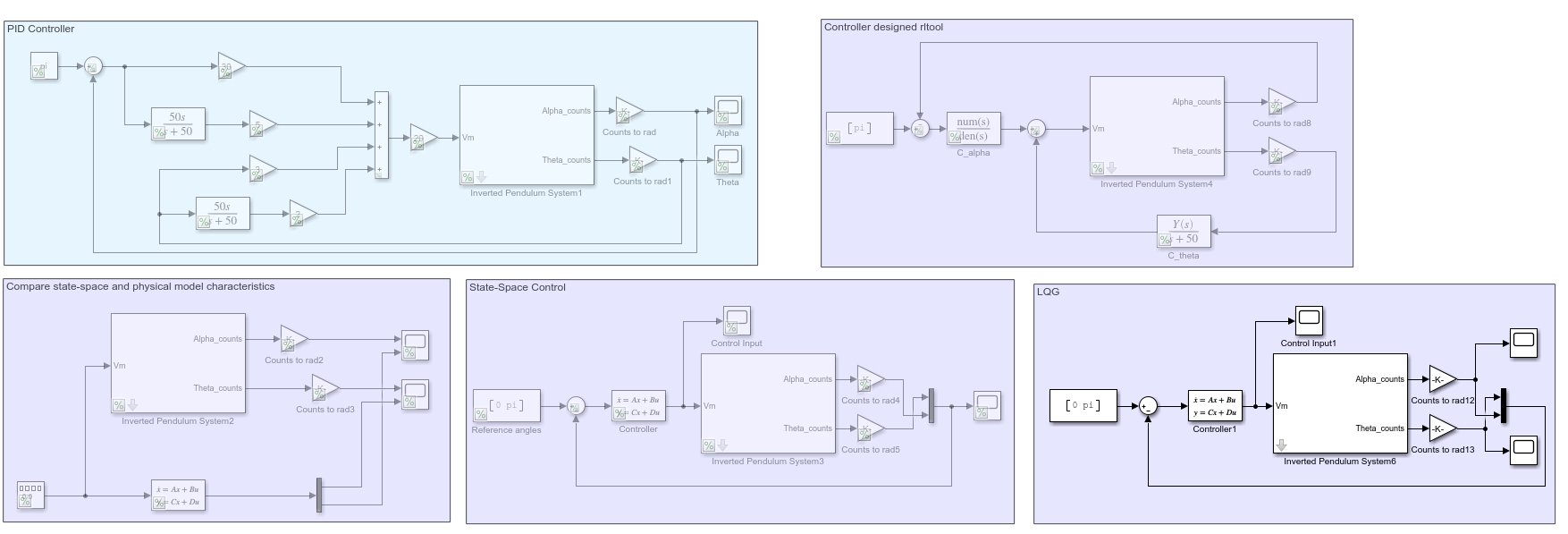
倒立摆仿真的目标是通过控制器设计实现将倒立摆保持在直立的状态。在MATLAB中,我们可以通过使用Simulink和Simscape这两个强大的工具来实现倒立摆的仿真。
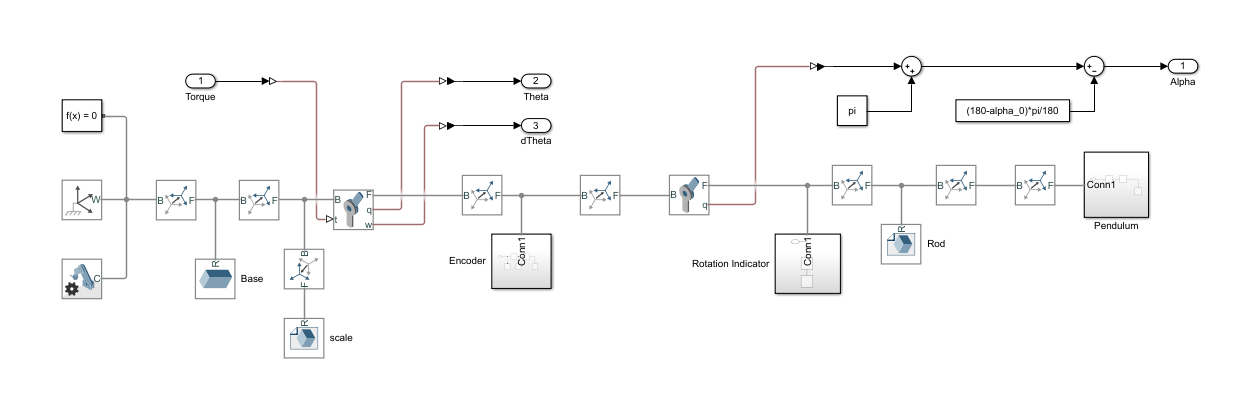
首先,我们需要了解Simulink和Simscape的基本概念和原理。Simulink是MATLAB的一个扩展模块,它提供了一个图形化的界面,可以用来建立系统级别的模型。而Simscape是一个用于物理建模和仿真的工具箱,它可以帮助我们建立具有多个物理域的系统模型。
倒立摆可以被建模为一个复杂的多物理域系统。在倒立摆的仿真中,我们需要考虑到重力、摩擦力、惯性等多个物理因素对系统的影响。为了更好地模拟这些因素,我们可以使用Simscape中的旋转臂、倒立柱、传感器等组件来搭建系统模型。
在建立好系统模型后,我们需要设计控制器来控制倒立摆的运动。控制器的设计是倒立摆仿真中非常重要的一部分。控制器可以基于PID控制、模糊控制、神经网络控制等不同的方法来实现。在MATLAB中,我们可以使用Simulink提供的控制器库来设计和调试控制器。
除了控制器的设计,文档的编写也是倒立摆仿真中必不可少的一环。文档可以帮助我们记录实验的过程和结果,从而更好地理解和总结倒立摆仿真的过程。在文档中,我们可以描述系统模型的建立过程、控制器的设计原理以及仿真结果的分析等内容。
综上所述,MATLAB倒立摆仿真是一种非常有用且强大的工具,它可以帮助工程师们更好地理解和掌握控制系统的原理。通过Simulink和Simscape的组合使用,我们可以建立复杂的倒立摆系统模型,并设计相应的控制器来实现倒立摆的控制。同时,编写文档也是倒立摆仿真中不可或缺的一部分,它可以帮助我们记录实验过程和结果,从而更好地总结和分析仿真的效果。
希望通过本文的介绍,读者们能够对MATLAB倒立摆仿真有一个更深入的了解,并且能够在实际应用中运用到这一技术中。倒立摆仿真作为控制系统领域中的重要工具,将会在未来的研究和工程实践中发挥越来越重要的作用。
相关的代码,程序地址如下:http://nodep.cn/668776709314.html
















 6255
6255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









