






基于二自由度横摆动力学的自动驾驶控制策略
随着自动驾驶技术的不断发展,如何精确地控制车辆按照预期的轨迹行驶成为了一个重要的研究方向。本文将讨论如何使用二自由度横摆动力学模型与模型预测控制(MPC)策略,来实现对双移线和单移线路径的跟踪控制。
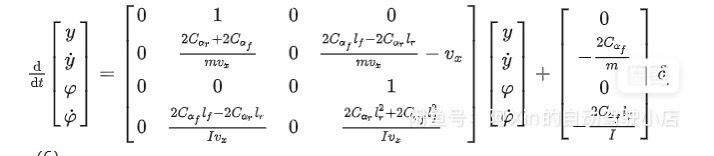
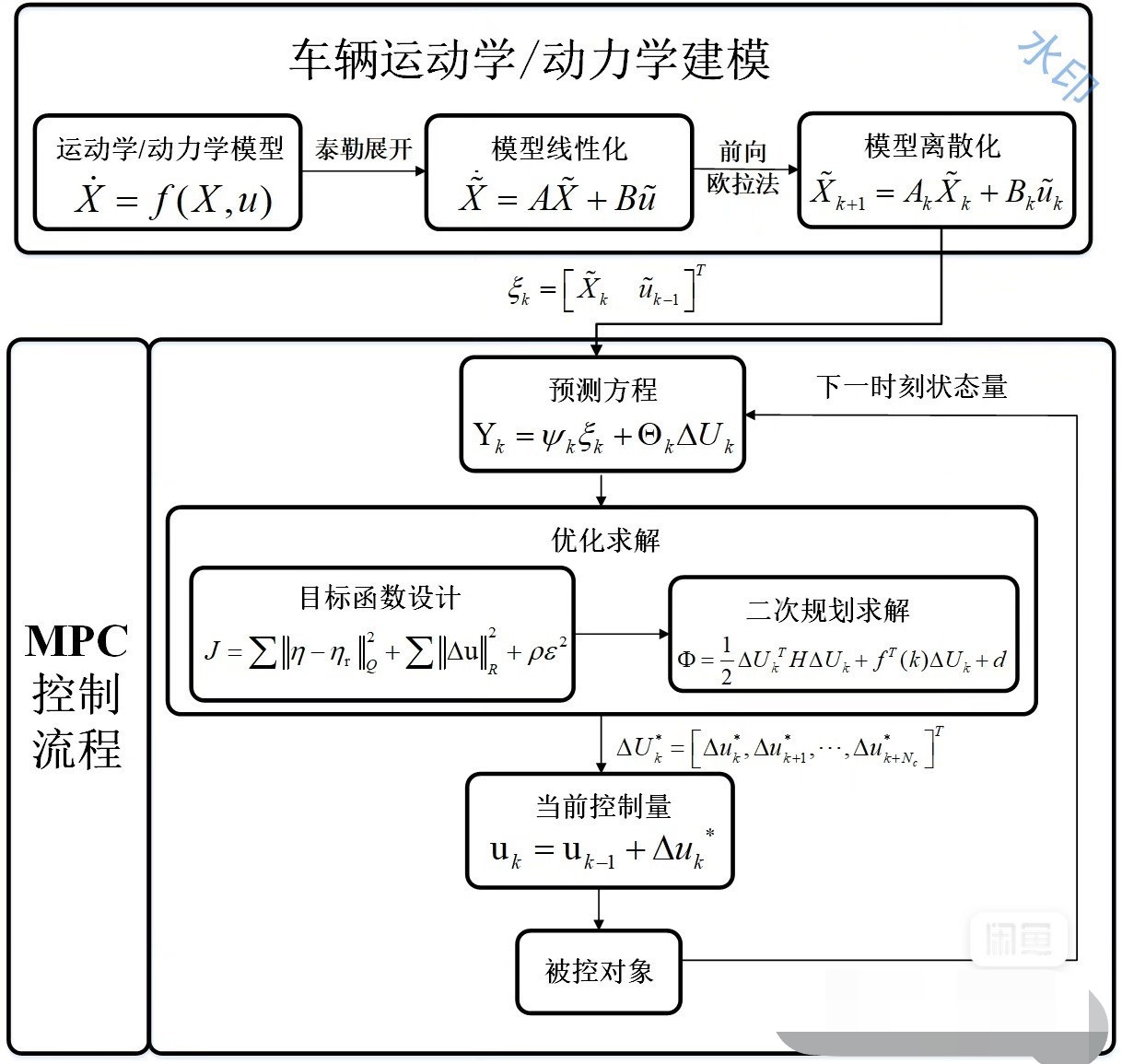
一、二自由度横摆动力学模型
二自由度车辆模型是一种简化的动力学模型,它考虑了车辆的侧向运动和横摆运动。这种模型可以帮助我们理解车辆在转向过程中的动态行为,并据此设计控制策略。
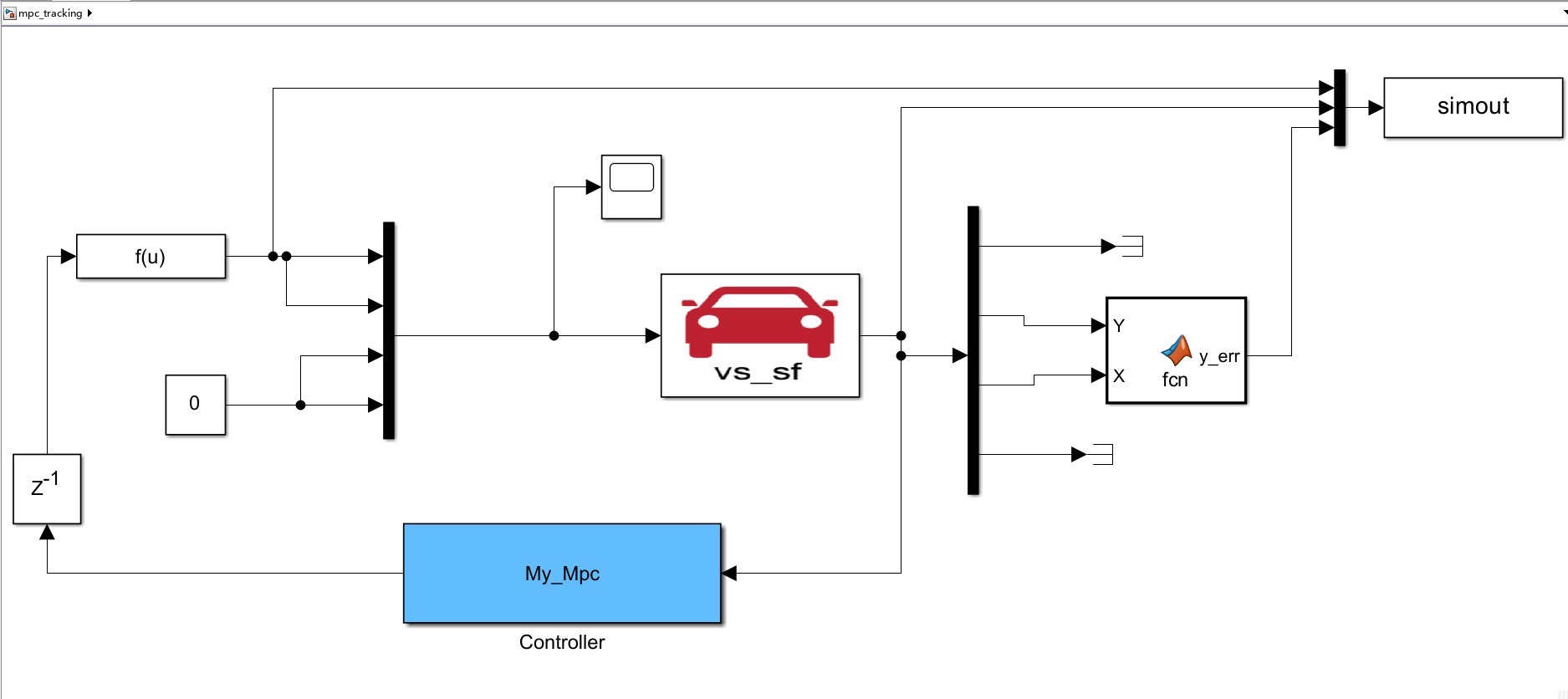
二、MPC跟踪控制
MPC是一种优化控制策略,它能够在给定的约束条件下,寻找未来一段时间内的最优控制策略。在自动驾驶中,MPC被广泛应用于路径跟踪和速度控制。
三、双移线和单移线路径跟踪
双移线和单移线路径是自动驾驶中常见的路径类型。通过二自由度横摆动力学模型和MPC策略的联合作用,车辆可以准确地跟踪这些路径。
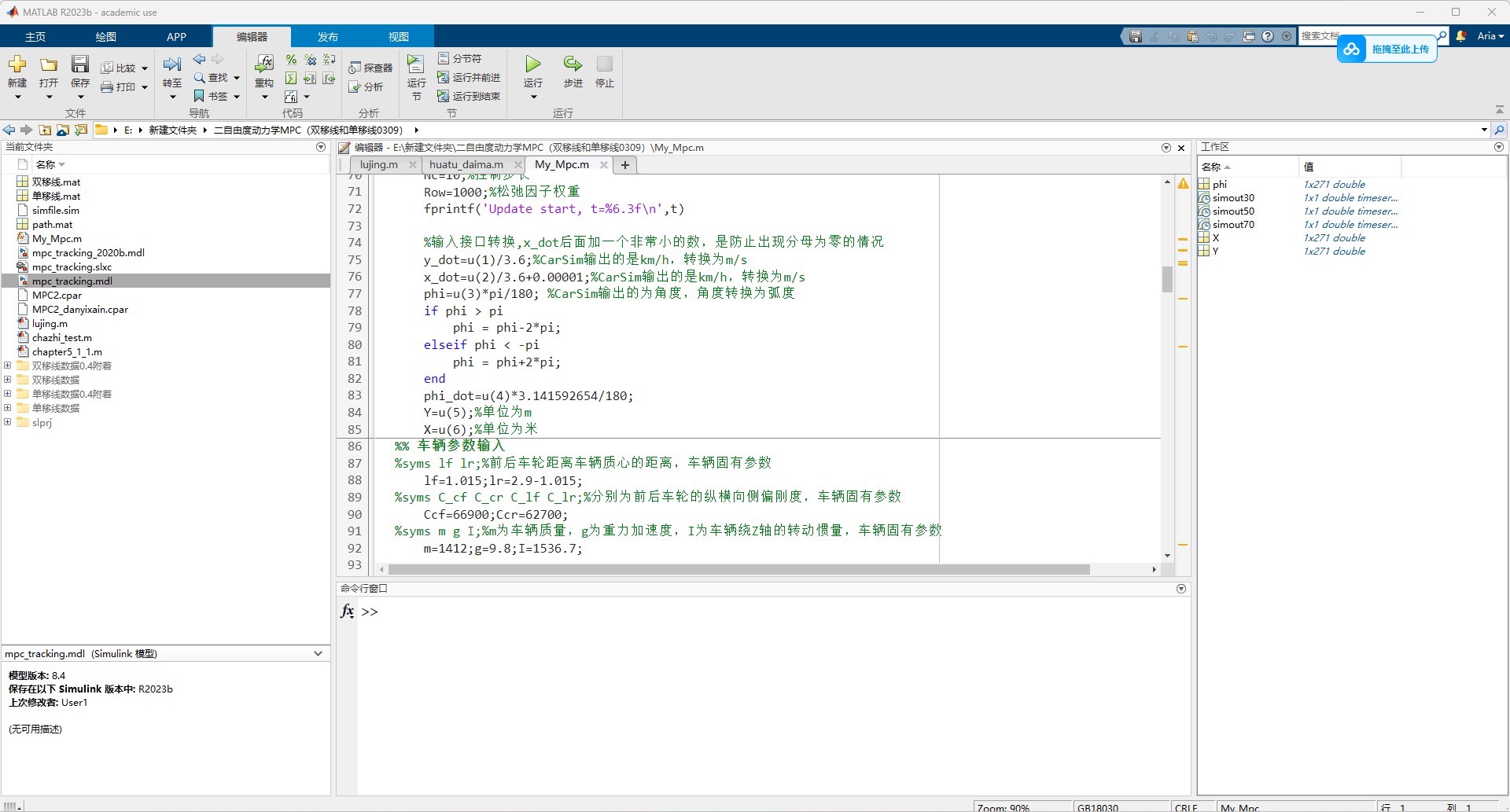
四、自定义期望轨迹的MPC跟踪控制
为了实现更灵活的路径跟踪,我们可以自定义期望轨迹,并将其输入到MPC控制器中。通过调整MPC的参数,如Q矩阵和R矩阵,我们可以优化侧向位置跟踪效果和前轮转角曲线效果。
五、参数调整与约束
为了达到最佳的控制效果,我们需要根据不同的轨迹和车辆性能调整MPC的参数。增大Q矩阵可以改善侧向位置的跟踪效果,而增大R矩阵则可以改善前轮转角曲线的响应。同时,我们还需要考虑输出值的边界约束,以确保车辆在行驶过程中不会超出安全范围。
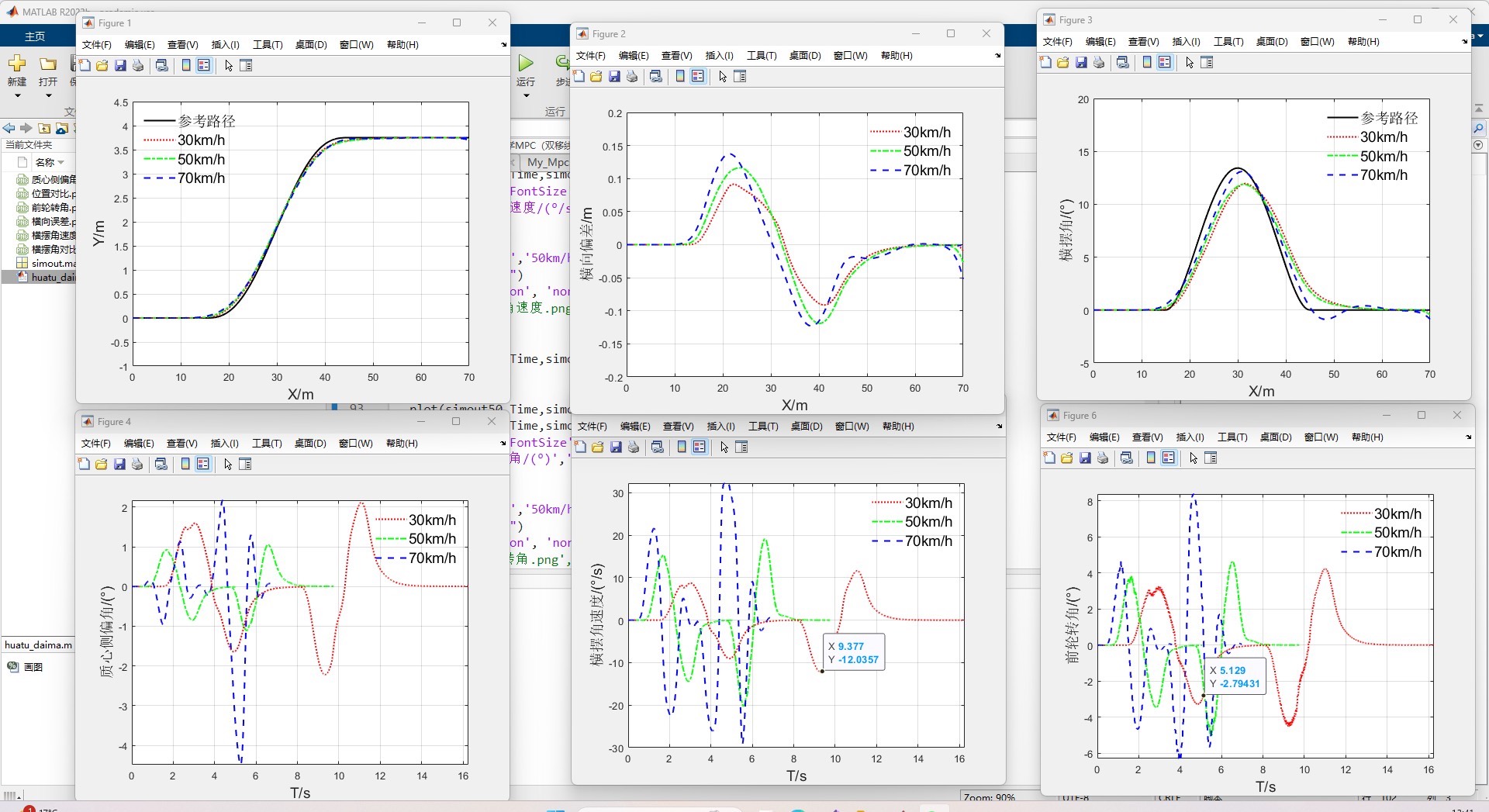
六、模型仿真与联合仿真
我们可以通过模型仿真来验证控制策略的有效性。在b站上,可以搜索到相关的仿真视频,如“阿Xin自动驾驶”等,这些视频提供了基于车辆二自由度动力学模型的mpc跟踪任意路径的仿真效果。此外,我们还可以使用carsim和simulink进行联合仿真,以进一步验证控制策略的实际效果。
七、总结
基于二自由度横摆动力学的MPC跟踪控制是一种有效的自动驾驶控制策略。通过调整Q矩阵和R矩阵等参数,我们可以优化侧向位置跟踪效果和前轮转角曲线效果。同时,通过模型仿真和联合仿真,我们可以验证控制策略的有效性,并进一步优化参数以获得最佳的控制效果。随着自动驾驶技术的不断发展,这种控制策略将在未来的自动驾驶中发挥重要作用。
自动驾驶控制-二自由度横摆动力学MPC跟踪双移线和单移线路径。
可自定义期望轨迹的二自由动力学 MPC 跟踪控制
可以外部导入轨迹 知道x y s 即纵向位置 横向位置 位移量即可
请注意= 要跟踪不同的轨迹,同一参数可能效果不一样 因此需要自己调参数保证控制效果最佳:
Q矩阵增大可以保证侧向位置跟踪效果变好,
R 矩阵增大可以保证前轮转角曲线效果变好。
同时调整输出值边界的约束
模型仿真效果可以b站搜up 阿Xin自动驾驶,欢迎关注
carsim和simulink联合仿真,基于车辆二自由度动力学模型的mpc跟踪任意路径



















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









