







 本文是对《Underwater Acoustic Vision》中3D图像生成和处理的综述,探讨了声呐与其他成像方法如选通成像、激光成像的对比,分析了声呐在海洋环境中的缺陷,如船体噪声和环境因素导致的失真。文章详细阐述了海底3D场景重建的流程,并介绍了三种不同传感器配置方案:声透镜聚焦、束波成型和全息摄影技术。
本文是对《Underwater Acoustic Vision》中3D图像生成和处理的综述,探讨了声呐与其他成像方法如选通成像、激光成像的对比,分析了声呐在海洋环境中的缺陷,如船体噪声和环境因素导致的失真。文章详细阐述了海底3D场景重建的流程,并介绍了三种不同传感器配置方案:声透镜聚焦、束波成型和全息摄影技术。
Three-Dimensional Image Generation and Processing in Underwater Acoustic Vision(综述)
基本内容
- 作者:VITTORIO MURINO, ANDREA TRUCCO
- 期刊时间:2000, Proceedings of the IEEE
- 下载地址: http://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=5
声呐外其他成像方法
- 选通成像,激光成像(精度比较高)
- 相比声呐劣势:声呐范围大,可以获得3D特征(测量渡越时间,即声波发射返回的时间)
存在缺点
- 船体噪声、分辨率精度不足造成的失真
- 温度、盐度不均造成的失真(在大场景下明显)
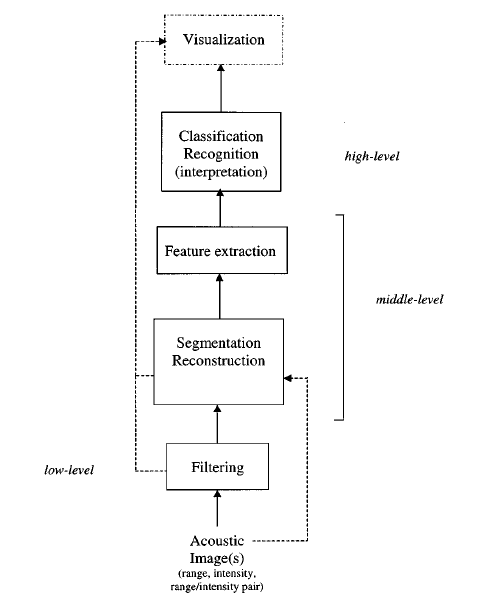
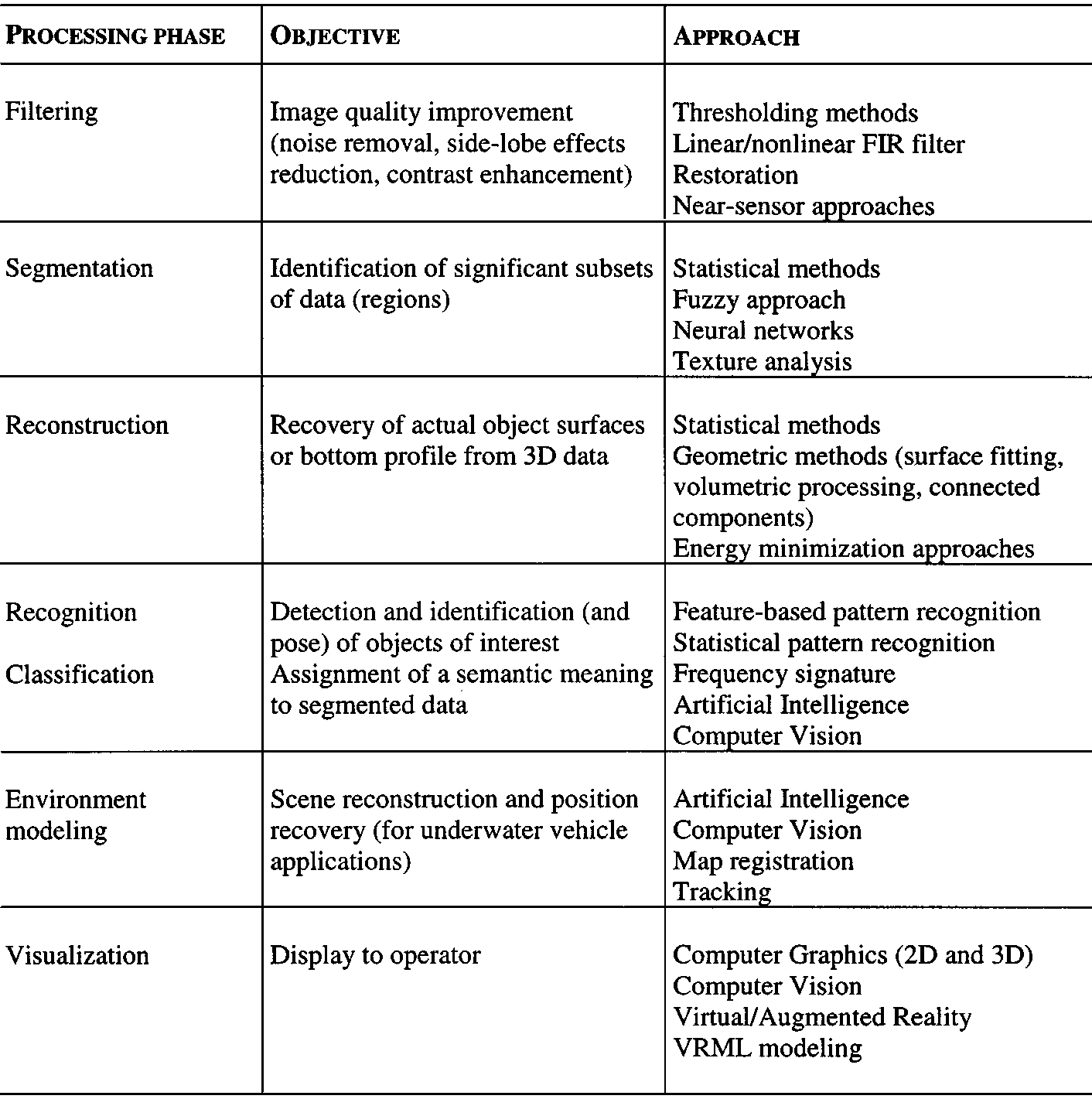
海底3D场景再现的流程
- 流程图
- 各过程解释
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









