









红色石头的个人网站:redstonewill.com
上节课我们主要介绍了Gradient Boosted Decision Tree。GBDT通过使用functional gradient的方法得到一棵一棵不同的树,然后再使用steepest descent的方式给予每棵树不同的权重,最后可以用来处理任何而定error measure。上节课介绍的GBDT是以regression为例进行介绍的,使用的是squared error measure。本节课讲介绍一种出现时间较早,但当下又非常火的一种机器算法模型,就是神经网络(Neural Network)。
Motivation
在之前的机器学习基石课程中,我们就接触过Perceptron模型了,例如PLA算法。Perceptron就是在矩 gt(x) g t ( x ) 外面加上一个sign函数,取值为{-1,+1}。现在,如果把许多perceptrons线性组合起来,得到的模型G就如下图所示:
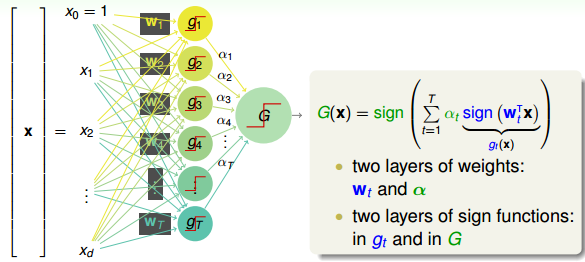
将左边的输入 (x0,x1,x2,⋯,xd) ( x 0 , x 1 , x 2 , ⋯ , x d ) 与T个不同的权重 (w1,w2,⋯,wT) ( w 1 , w 2 , ⋯ , w T ) 相乘(每个 wi w i 是d+1维的),得到T个不同的perceptrons为 (g1,g2,⋯,gT) ( g 1 , g 2 , ⋯ , g T ) 。最后,每个 gt g t 给予不同的权重 (α1,α2,⋯,αT) ( α 1 , α 2 , ⋯ , α T ) ,线性组合得到G。G也是一个perceptron模型。
从结构上来说,上面这个模型包含了两层的权重,分别是 wt w t 和 α α 。同时也包含了两层的sign函数,分别是 gt g t 和G。那么这样一个由许多感知机linear aggregation的模型能实现什么样的boundary呢?
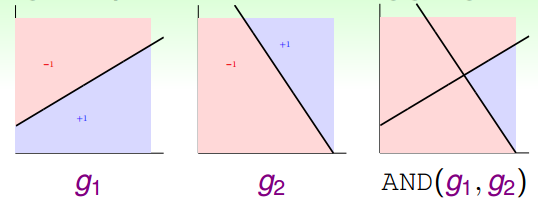
举个简单的例子,如下图所示, g1 g 1 和 g2 g 2 分别是平面上两个perceptrons。其中,红色表示-1,蓝色表示+1。这两个perceptrons线性组合可能得到下图右侧的模型,这表示的是 g1 g 1 和 g2 g 2 进行与(AND)的操作,蓝色区域表示+1。
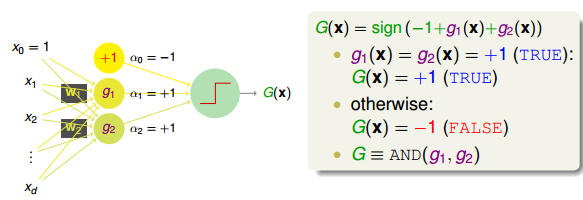
如何通过感知机模型来实现上述的 AND(g1,g2) A N D ( g 1 , g 2 ) 逻辑操作呢?一种方法是令第二层中的 α0=−1,α1=+1,α2=+1 α 0 = − 1 , α 1 = + 1 , α 2 = + 1 。这样,G(x)就可表示为:
g1 g 1 和 g2 g 2 的取值是{-1,+1},当 g1=−1,g2=−1 g 1 = − 1 , g 2 = − 1 时,G(x)=0;当 g1=−1,g2=+1 g 1 = − 1 , g 2 = + 1 时,G(x)=0;当 g1=+1,g2=−1 g 1 = + 1 , g 2 = − 1 时,G(x)=0;当 g1=+1,g2=+1 g 1 = + 1 , g 2 = + 1 时,G(x)=1。感知机模型如下所示:
这个例子说明了一些简单的线性边界,如上面的 g1 g 1 和 g2 g 2 ,在经过一层感知机模型,经线性组合后,可以得到一些非线性的复杂边界(AND运算)G(x)。
除此之外,或(OR)运算和非(NOT)运算都可以由感知机建立相应的模型,非常简单。
所以说,linear aggregation of perceptrons实际上是非常powerful的模型同时也是非常complicated模型。再看下面一个例子,如果二维平面上有个圆形区域,圆内表示+1,圆外表示-1。这样复杂的圆形边界是没有办法使用单一perceptron来解决的。如果使用8个perceptrons,用刚才的方法线性组合起来,能够得到一个很接近圆形的边界(八边形)。如果使用16个perceptrons,那么得到的边界更接近圆形(十六边形)。因此,使用的perceptrons越多,就能得到各种任意的convex set,即凸多边形边界。之前我们在机器学习基石中介绍过,convex set的VC Dimension趋向于无穷大( 2N 2 N )。这表示只要perceptrons够多,我们能得到任意可能的情况,可能的模型。但是,这样的坏处是模型复杂度可能会变得很大,从而造成过拟合(overfitting)。
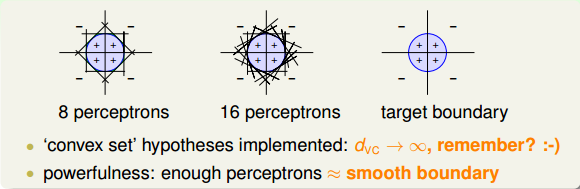
总的来说,足够数目的perceptrons线性组合能够得到比较平滑的边界和稳定的模型,这也是aggregation的特点之一。
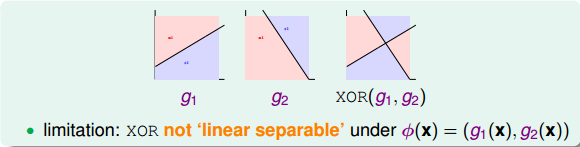
但是,也有单层perceptrons线性组合做不到的事情。例如刚才我们将的AND、OR、NOT三种逻辑运算都可以由单层perceptrons做到,而如果是异或(XOR)操作,就没有办法只用单层perceptrons实现。这是因为XOR得到的是非线性可分的区域,如下图所示,没有办法由 g1 g 1 和 g2 g 2 线性组合实现。所以说linear aggregation of perceptrons模型的复杂度还是有限制的。
那么,为了实现XOR操作,可以使用多层perceptrons,也就是说一次transform不行,我们就用多层的transform,这其实就是Basic Neural Network的基本原型。下面我们就尝试使用两层perceptrons来实现XOR的操作。
首先,根据布尔运算,异或XOR操作可以拆分成:
这种拆分实际上就包含了两层transform。第一层仅有AND操作,第二层是OR操作。这种两层的感知机模型如下所示:
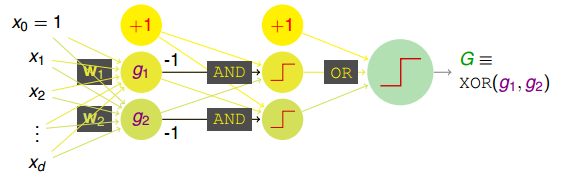
这样,从AND操作到XOR操作,从简单的aggregation of perceptrons到multi-layer perceptrons,感知机层数在增加,模型的复杂度也在增加,使最后得到的G能更容易解决一些非线性的复杂问题。这就是基本神经网络的基本模型。
顺便提一下,这里所说的感知机模型实际上就是在模仿人类的神经元模型(这就是Neural Network名称的由来)。感知机模型每个节点的输入就对应神经元的树突dendrite,感知机每个节点的输出就对应神经元的轴突axon。
Neural Network Hypothesis
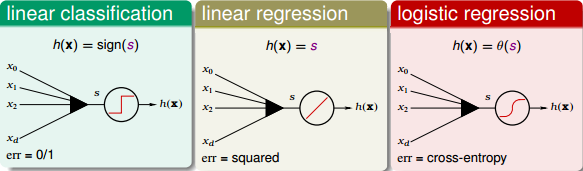
上一部分我们介绍的这种感知机模型其实就是Neural Network。输入部分经过一层一层的运算,相当于一层一层的transform,最后通过最后一层的权重,得到一个分数score。即在OUTPUT层,输出的就是一个线性模型。得到s后,下一步再进行处理。
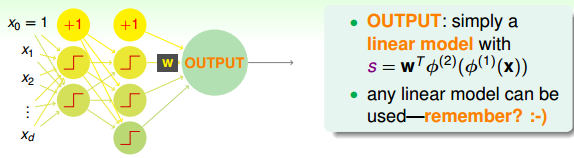
我们之前已经介绍过三种线性模型:linear classification,linear regression,logistic regression。那么,对于OUTPUT层的分数s,根据具体问题,可以选择最合适的线性模型。如果是binary classification问题,可以选择linear classification模型;如果是linear regression问题,可以选择linear regression模型;如果是soft classification问题,则可以选择logistic regression模型。本节课接下来将以linear regression为例,选择squared error来进行衡量。
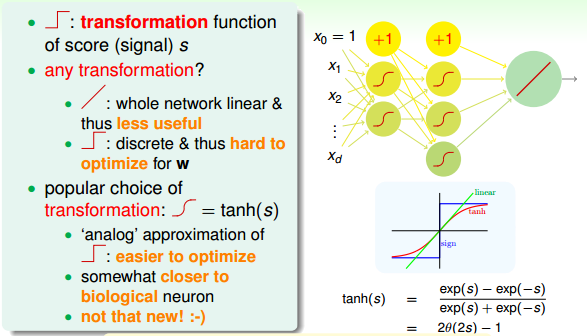
上面讲的是OUTPUT层,对于中间层,每个节点对应一个perceptron,都有一个transform运算。上文我们已经介绍过的transformation function是阶梯函数sign()。那除了sign()函数外,有没有其他的transformation function呢?
如果每个节点的transformation function都是线性运算(跟OUTPUT端一样),那么由每个节点的线性模型组合成的神经网络模型也必然是线性的。这跟直接使用一个线性模型在效果上并没有什么差异,模型能力不强,反而花费了更多不必要的力气。所以一般来说,中间节点不会选择线性模型。
如果每个节点的transformation function都是阶梯函数(即sign()函数)。这是一个非线性模型,但是由于阶梯函数是离散的,并不是处处可导,所以在优化计算时比较难处理。所以,一般也不选择阶梯函数作为transformation function。
既然线性函数和阶梯函数都不太适合作为transformation function,那么最常用的一种transformation function就是tanh(s),其表达式如下:
tanh(s)函数是一个平滑函数,类似“s”型。当|s|比较大的时候,tanh(s)与阶梯函数相近;当|s|比较小的时候,tanh(s)与线性函数比较接近。从数学上来说,由于处处连续可导,便于最优化计算。而且形状上类似阶梯函数,具有非线性的性质,可以得到比较复杂强大的模型。
顺便提一下,tanh(x)函数与sigmoid函数存在下列关系:
其中,
那么,接下来我们就使用tanh函数作为神经网络中间层的transformation function,所有的数学推导也基于此。实际应用中,可以选择其它的transformation function,不同的transformation function,则有不同的推导过程。
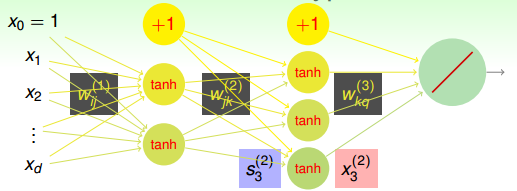
下面我们将仔细来看看Neural Network Hypothesis的结构。如下图所示,该神经网络左边是输入层,中间两层是隐藏层,右边是输出层。整体上来说,我们设定输入层为第0层,然后往右分别是第一层、第二层,输出层即为第3层。
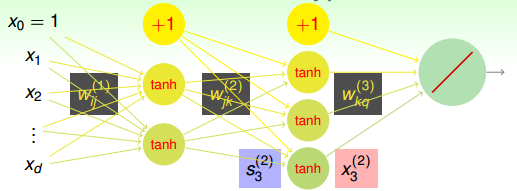
Neural Network Hypothesis中, d(0),d(1),⋯,d(L) d ( 0 ) , d ( 1 ) , ⋯ , d ( L ) 分别表示神经网络的第几层,其中L为总层数。例如上图所示的是3层神经网络,L=3。我们先来看看每一层的权重 w(l)ij w i j ( l ) ,上标l满足 1≤l≤L 1 ≤ l ≤ L ,表示是位于哪一层。下标i满足 0≤i≤d(l−1) 0 ≤ i ≤ d ( l − 1 ) ,表示前一层输出的个数加上bias项(常数项)。下标j满足 1≤j≤d(l) 1 ≤ j ≤ d ( l ) ,表示该层节点的个数(不包括bias项)。
对于每层的分数score,它的表达式为:
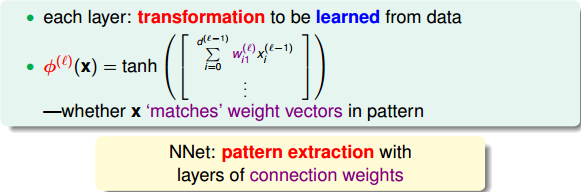
对于每层的transformation function,它的表达式为:
因为是regression模型,所以在输出层(l=L)直接得到 x(l)j=s(l)j x j ( l ) = s j ( l ) 。

介绍完Neural Network Hypothesis的结构之后,我们来研究下这种算法结构到底有什么实际的物理意义。还是看上面的神经网络结构图,每一层输入到输出的运算过程,实际上都是一种transformation,而转换的关键在于每个权重值 w(l)ij w i j ( l ) 。每层网络利用输入x和权重w的乘积,在经过tanh函数,得到该层的输出,从左到右,一层一层地进行。其中,很明显,x和w的乘积 ∑d(l−1)i=0w(l)ijx(l−1)i ∑ i = 0 d ( l − 1 ) w i j ( l ) x i ( l − 1 ) 越大,那么tanh(wx)就会越接近1,表明这种transformation效果越好。再想一下,w和x是两个向量,乘积越大,表明两个向量内积越大,越接近平行,则表明w和x有模式上的相似性。从而,更进一步说明了如果每一层的输入向量x和权重向量w具有模式上的相似性,比较接近平行,那么transformation的效果就比较好,就能得到表现良好的神经网络模型。也就是说,神经网络训练的核心就是pattern extraction,即从数据中找到数据本身蕴含的模式和规律。通过一层一层找到这些模式,找到与输入向量x最契合的权重向量w,最后再由G输出结果。
Neural Network Learning
我们已经介绍了Neural Network Hypothesis的结构和算法流程。确定网络结构其实就是确定各层的权重值 w(l)ij w i j ( l ) 。那如何根据已有的样本数据,找到最佳的权重 w(l)ij w i j ( l ) 使error最小化呢?下面我们将详细推导。
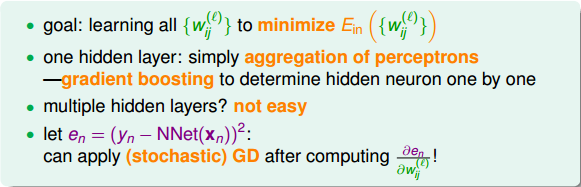
首先,我们的目标是找到最佳的 w(l)ij w i j ( l ) 让 Ein({w(l)ij}) E i n ( { w i j ( l ) } ) 最小化。如果只有一层隐藏层,就相当于是aggregation of perceptrons。可以使用我们上节课介绍的gradient boosting算法来一个一个确定隐藏层每个神经元的权重,输入层到隐藏层的权重可以通过C&RT算法计算的到。这不是神经网络常用的算法。如果隐藏层个数有两个或者更多,那么aggregation of perceptrons的方法就行不通了。就要考虑使用其它方法。
根据error function的思想,从输出层来看,我们可以得到每个样本神经网络预测值与实际值之间的squared error: en=(yn−NNet(xn))2 e n = ( y n − N N e t ( x n ) ) 2 ,这是单个样本点的error。那么,我们只要能建立 en e n 与每个权重 w(l)ij w i j ( l ) 的函数关系,就可以利用GD或SGD算法对 w(l)ij w i j ( l ) 求偏微分,不断迭代优化 w(l)ij w i j ( l ) 值,最终得到使 en e n 最小时对应的 w(l)ij w i j ( l ) 。
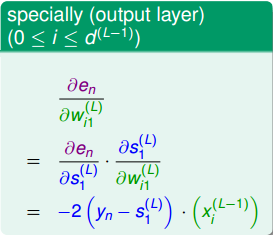
为了建立 en e n 与各层权重 w(l)ij w i j ( l ) 的函数关系,求出 en e n 对 w(l)ij w i j ( l ) 的偏导数 ∂enw(l)ij ∂ e n w i j ( l ) ,我们先来看输出层如何计算 ∂enw(L)i1 ∂ e n w i 1 ( L ) 。 en e n 与 w(L)i1 w i 1 ( L ) 的函数关系为:

计算 en e n 对 w(L)i1 w i 1 ( L ) 的偏导数,得到:
以上是输出层求偏导的结果。如果是其它层,即 l≠L l ≠ L ,偏导计算可以写成如下形式:
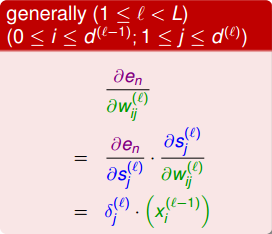
上述推导中,令 en e n 与第l层第j个神经元的分数 s(l)j s j ( l ) 的偏导数记为 δ(l)j δ j ( l ) 。即:
当 l=L l = L 时, δ(L)1=−2(yn−s(L)1) δ 1 ( L ) = − 2 ( y n − s 1 ( L ) ) ;当 l≠L l ≠ L 时, δ(l)j δ j ( l ) 是未知的,下面我们将进行运算推导,看看不同层之间的 δ(l)j δ j ( l ) 是否有递推关系。
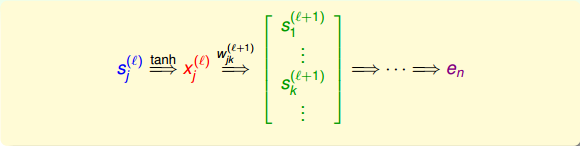
如上图所示,第l层第j个神经元的分数 s(l)j s j ( l ) 经过tanh函数,得到该层输出 x(l)j x j ( l ) ,再与下一层权重 w(l+1)jk w j k ( l + 1 ) 相乘,得到第l+1层的分数 s(l+1)j s j ( l + 1 ) ,直到最后的输出层 en e n 。
那么,利用上面 s(l)j s j ( l ) 到 s(l+1)j s j ( l + 1 ) 这样的递推关系,我们可以对偏导数 δ(l)j δ j ( l ) 做一些中间变量替换处理,得到如下表达式:
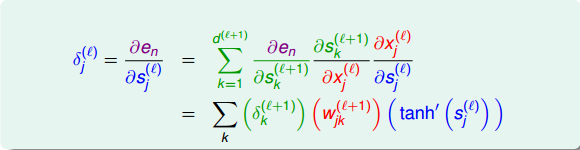
值得一提的是,上式中有个求和项,其中k表示下一层即l+1层神经元的个数。表明l层的 s(l)j s j ( l ) 与l+1层的所有 s(l+1)k s k ( l + 1 ) 都有关系。因为 s(l)j s j ( l ) 参与到每个 s(l+1)k s k ( l + 1 ) 的运算中了。
这样,我们得到了 δ(l)j δ j ( l ) 与 δ(l)k δ k ( l ) 的递推关系。也就是说如果知道了 δ(l)k δ k ( l ) 的值,就能推导出 δ(l)j δ j ( l ) 的值。而最后一层,即输出层的 δ(L)1=−2(yn−s(L)1) δ 1 ( L ) = − 2 ( y n − s 1 ( L ) ) ,那么就能一层一层往前推导,得到每一层的 δ(l)j δ j ( l ) ,从而可以计算出 en e n 对各个 w(l)ij w i j ( l ) 的偏导数 ∂enw(l)ij ∂ e n w i j ( l ) 。计算完偏微分之后,就可以使用GD或SGD算法进行权重的迭代优化,最终得到最优解。
神经网络中,这种从后往前的推导方法称为Backpropagation Algorithm,即我们常常听到的BP神经网络算法。它的算法流程如下所示:
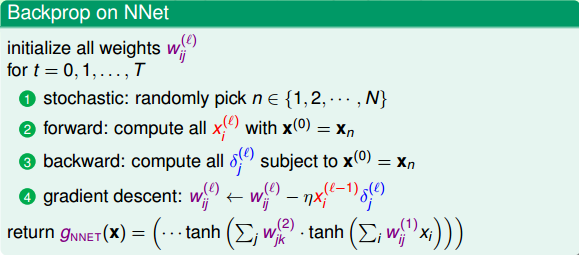
上面采用的是SGD的方法,即每次迭代更新时只取一个点,这种做法一般不够稳定。所以通常会采用mini-batch的方法,即每次选取一些数据,例如 N10 N 10 ,来进行训练,最后求平均值更新权重w。这种做法的实际效果会比较好一些。
Optimization and Regularization
经过以上的分析和推导,我们知道神经网络优化的目标就是让 Ein(w) E i n ( w ) 最小化。本节课我们采用error measure是squared error,当然也可以采用其它的错误衡量方式,只要在推导上做稍稍修改就可以了,此处不再赘述。

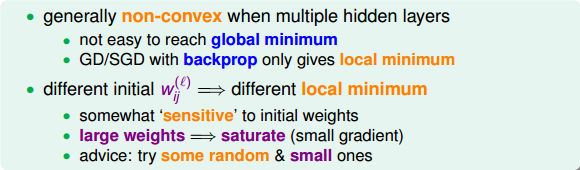
下面我们将主要分析神经网络的优化问题。由于神经网络由输入层、多个隐藏层、输出层构成,结构是比较复杂的非线性模型,因此 Ein(w) E i n ( w ) 可能有许多局部最小值,是non-convex的,找到全局最小值(globalminimum)就会困难许多。而我们使用GD或SGD算法得到的很可能就是局部最小值(local minimum)。
基于这个问题,不同的初始值权重 w(l)ij w i j ( l ) 通常会得到不同的local minimum。也就是说最终的输出G与初始权重 w(l)ij w i j ( l ) 有很大的关系。在选取 w(l)ij w i j ( l ) 上有个技巧,就是通常选择比较小的值,而且最好是随机random选择。这是因为,如果权重 w(l)ij w i j ( l ) 很大,那么根据tanh函数,得到的值会分布在两侧比较平缓的位置(类似于饱和saturation),这时候梯度很小,每次迭代权重可能只有微弱的变化,很难在全局上快速得到最优解。而随机选择的原因是通常对权重 w(l)ij w i j ( l ) 如何选择没有先验经验,只能通过random,从普遍概率上选择初始值,随机性避免了人为因素的干预,可以说更有可能经过迭代优化得到全局最优解。
下面从理论上看一下神经网络模型的VC Dimension。对于tanh这样的transfer function,其对应的整个模型的复杂度 dvc=O(VD) d v c = O ( V D ) 。其中V是神经网络中神经元的个数(不包括bias点),D表示所有权值的数量。所以,如果V足够大的时候,VC Dimension也会非常大,这样神经网络可以训练出非常复杂的模型。但同时也可能会造成过拟合overfitting。所以,神经网络中神经元的数量V不能太大。
为了防止神经网络过拟合,一个常用的方法就是使用regularization。之前我们就介绍过可以在error function中加入一个regularizer,例如熟悉的L2 regularizer Ω(w) Ω ( w ) :
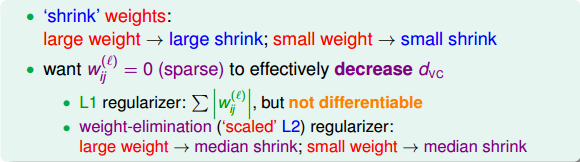
但是,使用L2 regularizer 有一个缺点,就是它使每个权重进行等比例缩小(shrink)。也就是说大的权重缩小程度较大,小的权重缩小程度较小。这会带来一个问题,就是等比例缩小很难得到值为零的权重。而我们恰恰希望某些权重 w(l)ij=0 w i j ( l ) = 0 ,即权重的解是松散(sparse)的。因为这样能有效减少VC Dimension,从而减小模型复杂度,防止过拟合发生。
那么为了得到sparse解,有什么方法呢?我们之前就介绍过可以使用L1 regularizer: ∑|wij(l)| ∑ | w i j ( l ) | ,但是这种做法存在一个缺点,就是包含绝对值不容易微分。除此之外,另外一种比较常用的方法就是使用weight-elimination regularizer。weight-elimination regularizer类似于L2 regularizer,只不过是在L2 regularizer上做了尺度的缩小,这样能使large weight和small weight都能得到同等程度的缩小,从而让更多权重最终为零。weight-elimination regularizer的表达式如下:
除了weight-elimination regularizer之外,还有另外一个很有效的regularization的方法,就是Early Stopping。简而言之,就是神经网络训练的次数t不能太多。因为,t太大的时候,相当于给模型寻找最优值更多的可能性,模型更复杂,VC Dimension增大,可能会overfitting。而t不太大时,能有效减少VC Dimension,降低模型复杂度,从而起到regularization的效果。 Ein E i n 和 Etest E t e s t 随训练次数t的关系如下图右下角所示:
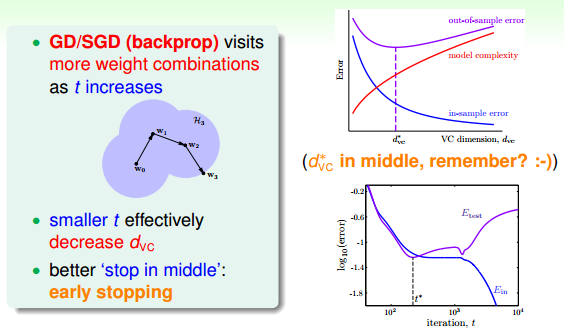
那么,如何选择最佳的训练次数t呢?可以使用validation进行验证选择。
总结
本节课主要介绍了Neural Network模型。首先,我们通过使用一层甚至多层的perceptrons来获得更复杂的非线性模型。神经网络的每个神经元都相当于一个Neural Network Hypothesis,训练的本质就是在每一层网络上进行pattern extraction,找到最合适的权重 w(l)ij w i j ( l ) ,最终得到最佳的G。本课程以regression模型为例,最终的G是线性模型,而中间各层均采用tanh函数作为transform function。计算权重 w(l)ij w i j ( l ) 的方法就是采用GD或者SGD,通过Backpropagation算法,不断更新优化权重值,最终使得 Ein(w) E i n ( w ) 最小化,即完成了整个神经网络的训练过程。最后,我们提到了神经网络的可以使用一些regularization来防止模型过拟合。这些方法包括随机选择较小的权重初始值,使用weight-elimination regularizer或者early stopping等。
注明:
文章中所有的图片均来自台湾大学林轩田《机器学习技法》课程
更多AI资源请关注公众号:红色石头的机器学习之路(ID:redstonewill)

















 4235
4235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











