






两相混合式步进电机数学模型
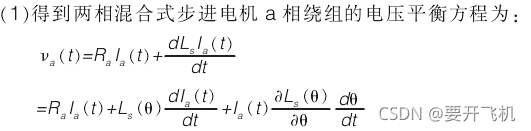
式中 Ls为自感,它与转子的机械角位置 θ 有关。 由于混合式步进电机中磁芯造成很大的气隙, 其可变磁阻对于输出总力矩的贡献可以忽略,式 (2)作为单相绕组等效电路 的表达式 ,如图 1 所示,等效电路由三部分组成,第一项为 a 相绕组电阻压降, 第二项为由转子位置改变而引起的 a 相绕组中磁链变化而感应的电势, 第三项为由电流变化引起磁链变化而感应的电势,即反电动势 ua。反电动势 ua可以用一个反应转子位置的正弦函数近似表达如下式:
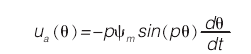
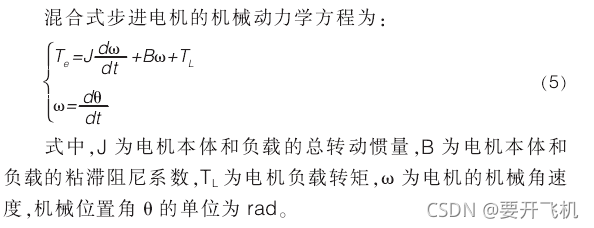
式中,p 为磁极齿数,ψm为电机最大磁通量。 混合式步进电机的电磁力矩分别由相电流,磁极之间的磁通量和对转子影响显著的定位力矩(Detent Torque)交互作用产生,其表达式如下:
![]()
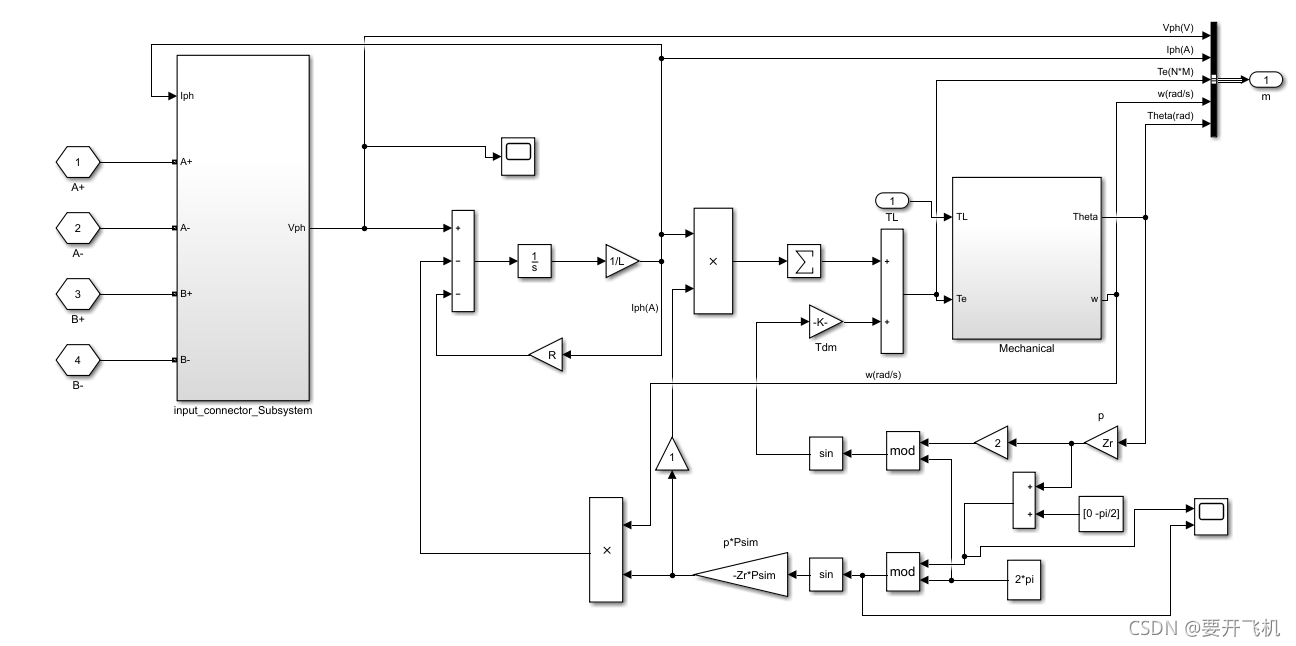
电机参数设置
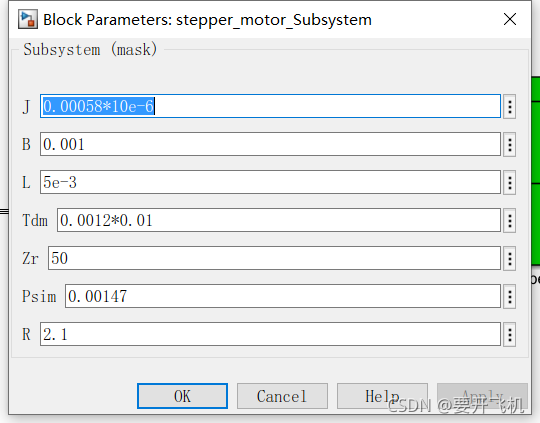
模型为两相4拍步进电机,磁极齿数Zr=50,所以步距角等于360/(4*50)=1.8°
齿距角等于360/50=7.2°
电机为4拍电机,所以4个脉冲走1齿,即4个脉冲信号电机转动7.2°
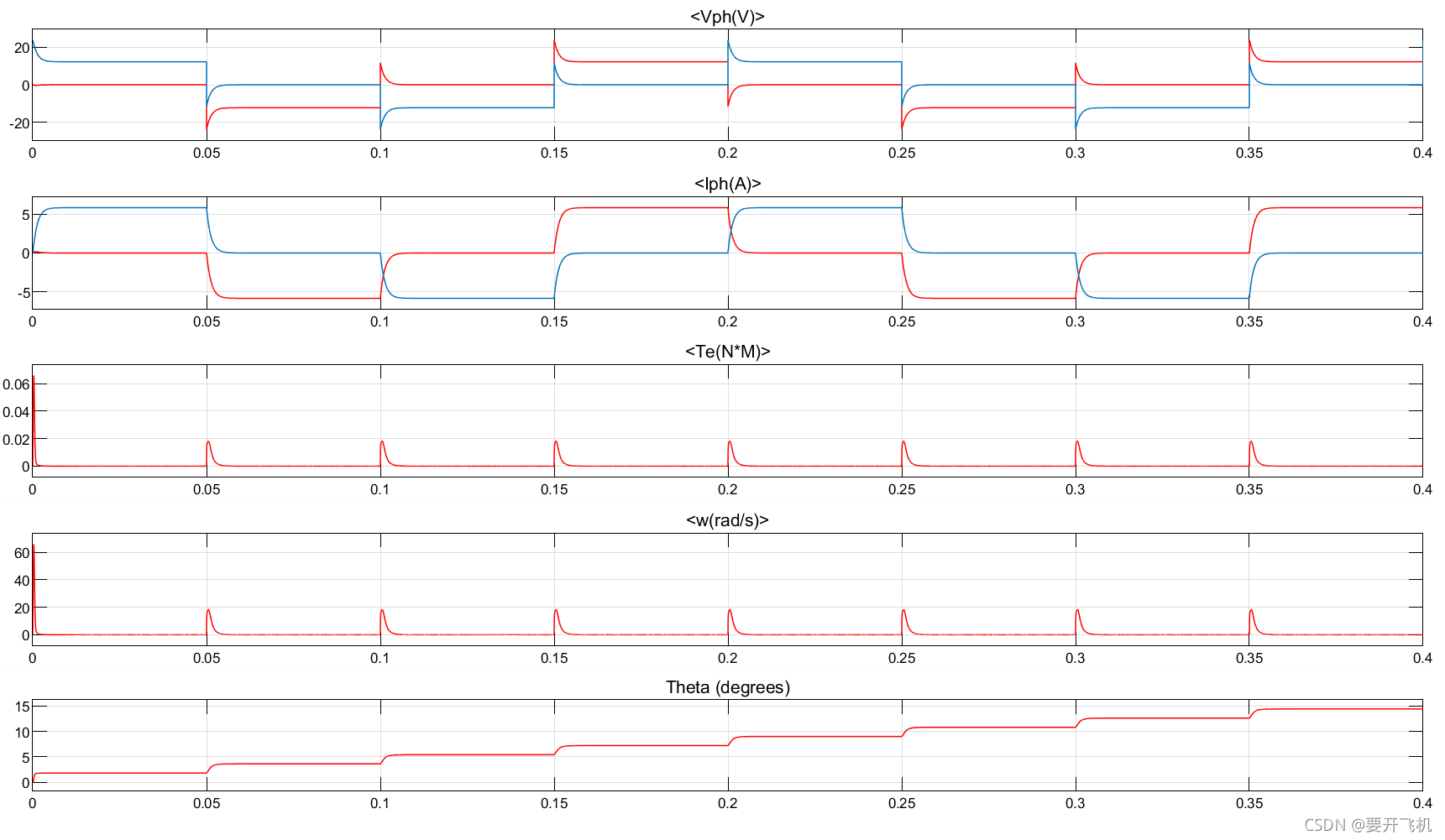
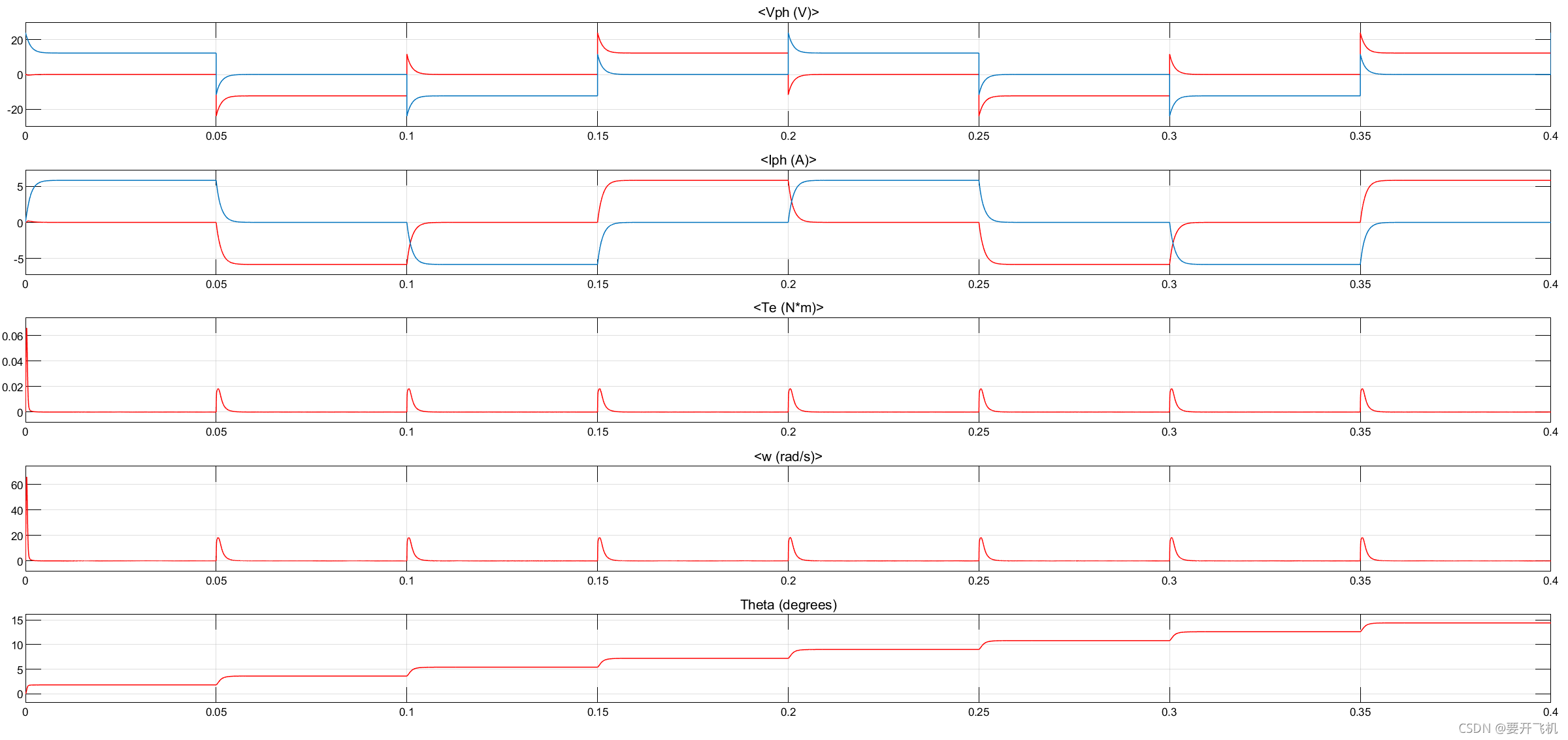
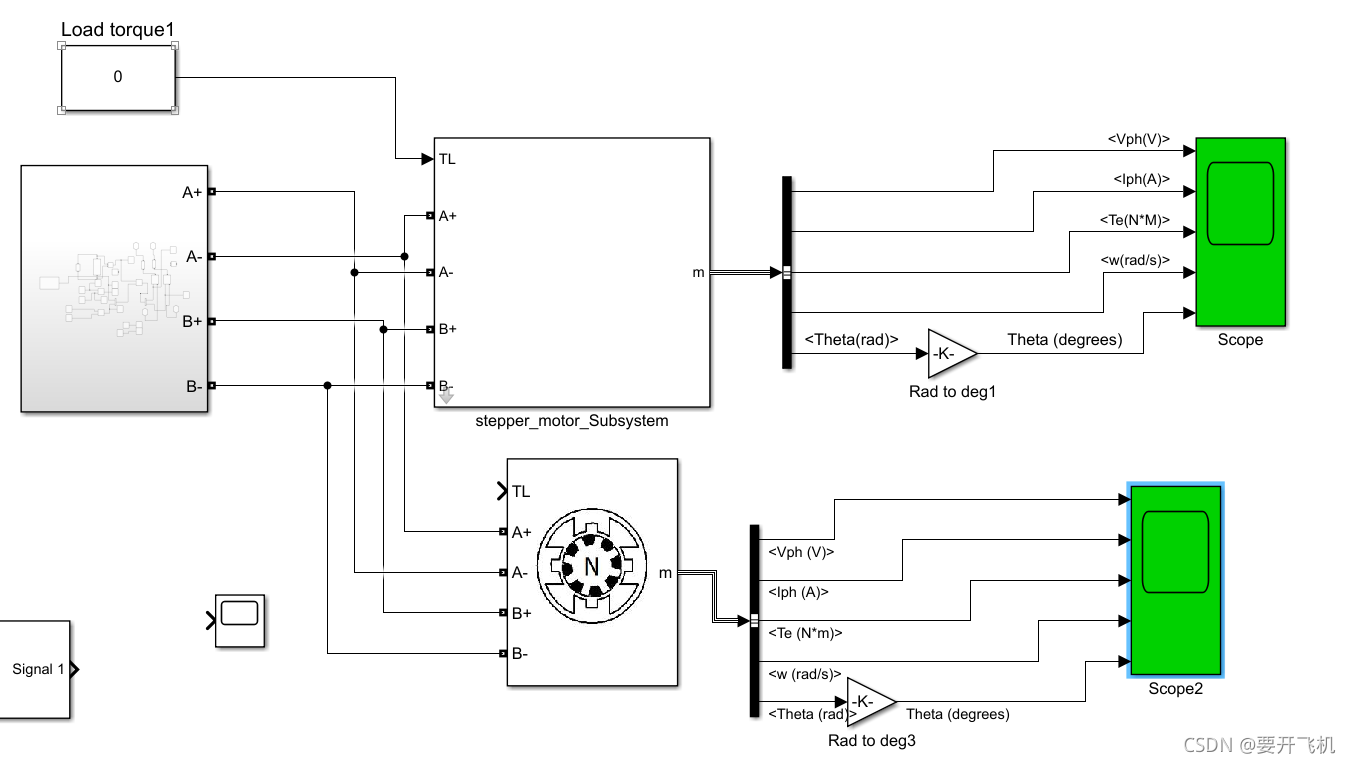
上面是自己建的两相4拍步进电机模型的输出结果,下面是matlab自带的步进电机模型输出结果,两者相同,模型是有效的。

















 105
105

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









