






源自:模式识别与人工智能
作者:张晓明 高士杰 姚昌瑀 褚誉 彭硕
“人工智能技术与咨询” 发布
摘要
强化学习可以让机器人通过与环境的交互,学习最优的行动策略,是目前机器人领域关注的重要前沿方向之一.文中简述机器人任务规划问题的形式化建模,分析强化学习的主要方法,分别介绍无模型强化学习、基于模型的强化学习和分层强化学习的研究进展,着重探讨基于强化学习的机器人任务规划的研究进展,并讨论各种强化学习及其应用情况.最后总结强化学习在机器人应用中面临的问题与挑战,展望未来的研究方向.
关键词
机器人, 任务规划, 强化学习, 无模型强化学习, 基于模型的强化学习, 分层强化学习
1 机器人任务规划问题形式化建模
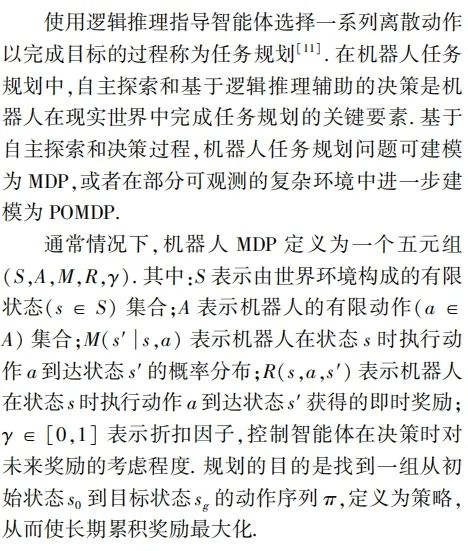
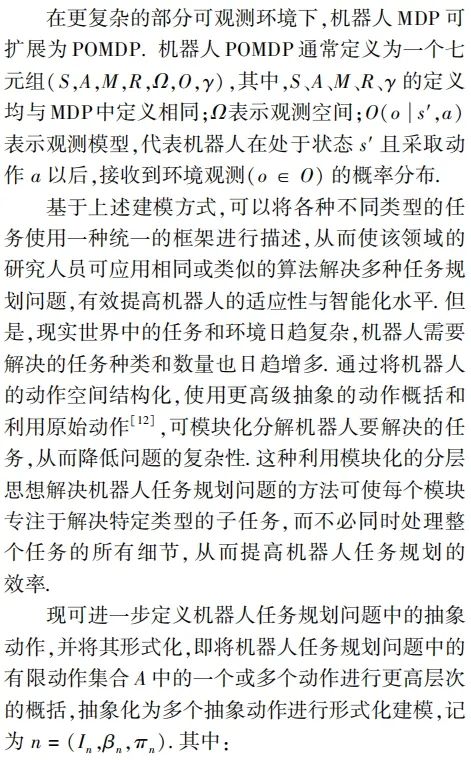
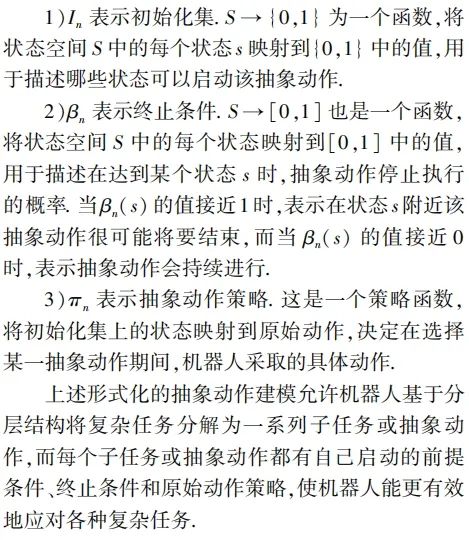
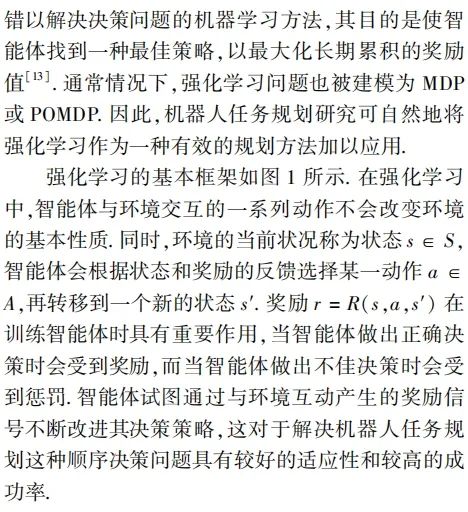
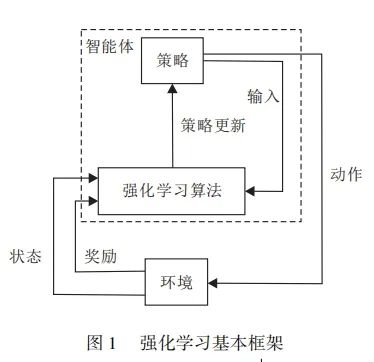
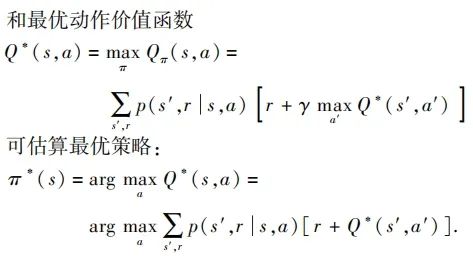
2 强化学习基本概念
![]()


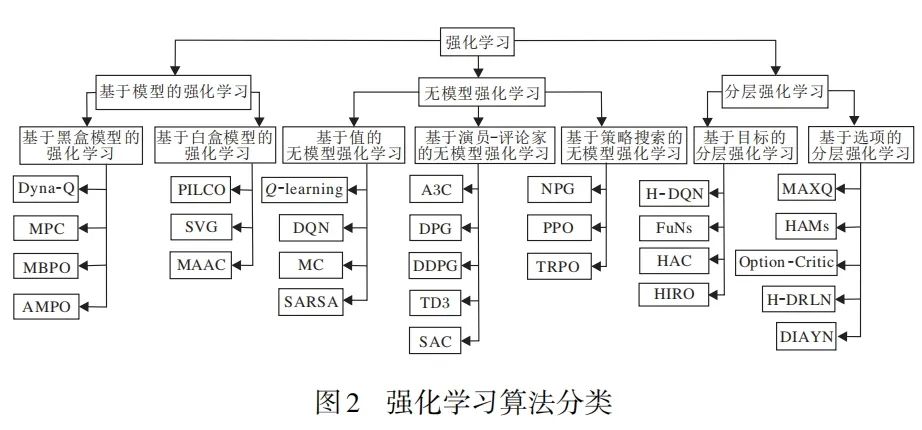
3 强化学习分类



4 基于强化学习的机器人任务规划

5 结 束 语

声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询” 发布














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









