







今天在机电工程中心老师的指导下,小组顺利完成了智能避障小车的实验。
一:组装小车
根据实验册 按照顺序 安装小车

安装成功:

二:主控板,扩展板,编程软件
1 Basra 主控板
Basra的处理器是ATmega328,同时具有14路数字输入/输出口,6路模拟输入,一个16MHZ晶体振荡器,一个usb口,一个电源插座,一个复位按钮。
2 Bigfish 扩展板
Bigfish扩展板扩展了伺服电机接口,8*8led点阵,直流电机驱动以及1个通用扩展接口。
3 Arduino 编程软件
4 近红外传感器
近红外传感器可以发射井接收反时的红外信号,有效检测范围在20cm以内。工作电压:4.7~5.5V,工作电流: 1.2mA,频率38Khz
检测到障碍物时传感器发出低电平信号,主控板将这个信号标为1,高电平时为0。
三 编程
采用图像化编程
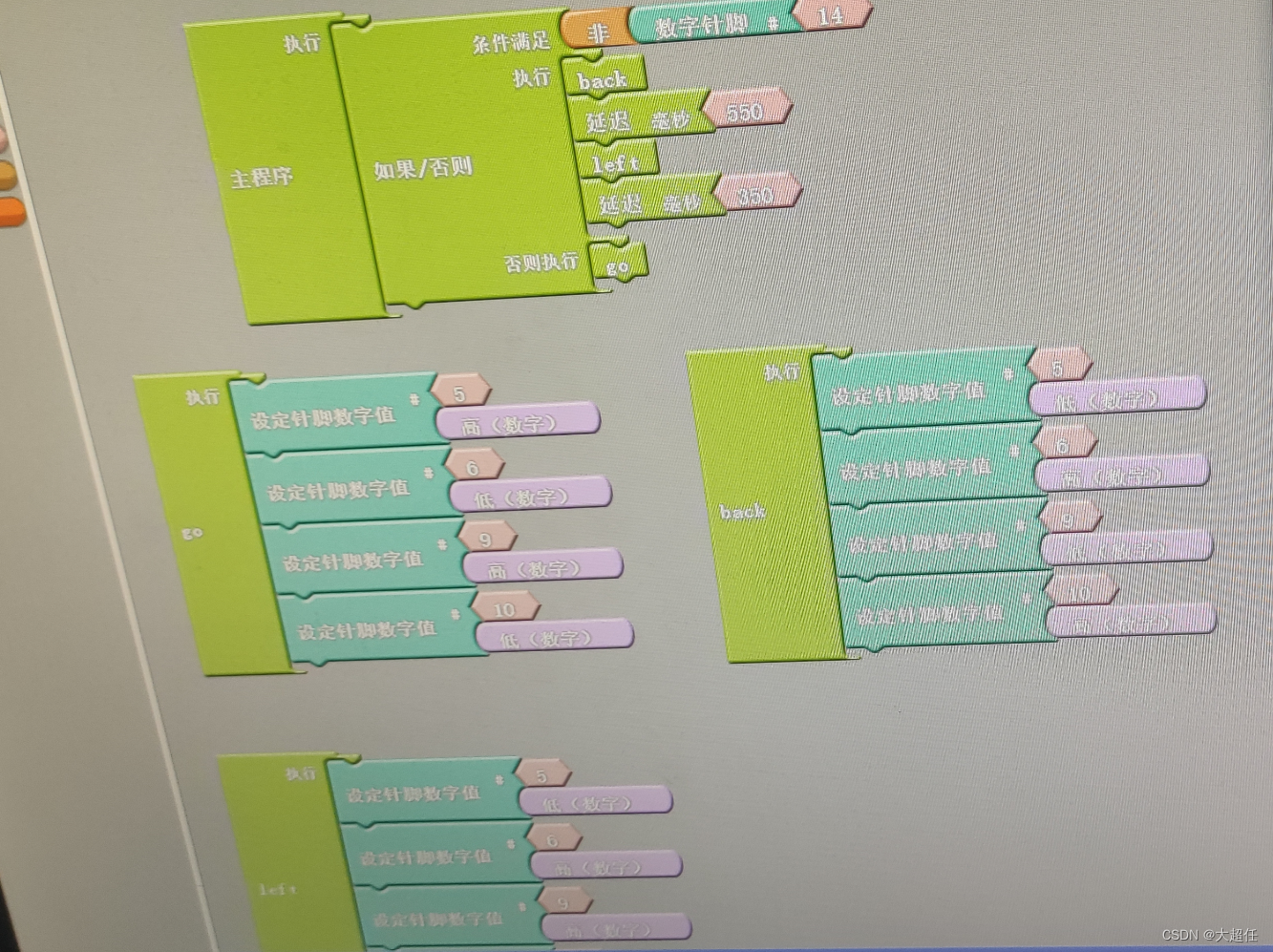
如果参数是1(有障碍物)则后退 然后左转一定角度 。如果参数是0(无障碍物) 前进。
代码如下:
void back() ;
void left();
void right();
void go();
void setup()
{
pinMode(14,INPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode( 5,OUTPUT);
pinMode(6,OUTPUT);
}
void loop()
{
if(!(digitalRead(14))
{
back();
}
else
{
go();
}
void left()
{
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
}
void back()
{
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
digitalWrite(5,Low);
digitalWrite(6,HIGH);
}
void right()
{
digitalWrite(9,HIGH);
digitalWrite(10,LOW);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
}
void go()
{
digitalWrite(9,HIGH);
igitalWrite(10,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
}最终成果

















 132
132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









