







 RANSAC算法是一种用于从包含局外点的观测数据中估计数学模型参数的方法。常用于计算机视觉任务,如图像拼接、立体摄像机基础矩阵估计和滤除误匹配。在处理特征匹配时,RANSAC通过随机抽样和投票机制筛选出最佳模型,降低误匹配的影响。算法迭代次数与置信度有关,但无法保证找到全局最优解,需要预先设定阈值。
RANSAC算法是一种用于从包含局外点的观测数据中估计数学模型参数的方法。常用于计算机视觉任务,如图像拼接、立体摄像机基础矩阵估计和滤除误匹配。在处理特征匹配时,RANSAC通过随机抽样和投票机制筛选出最佳模型,降低误匹配的影响。算法迭代次数与置信度有关,但无法保证找到全局最优解,需要预先设定阈值。
最早应该是十四讲上见过,在第九章的project中src中的visual_odometry.cpp中,最核心的求解3d-2d的变换中:
//整个核心就是用这个cv::solvePnPRansac()去求解两帧之间的位姿变化
cv::solvePnPRansac( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );当时只是简单的认为是PNP求解,没有注意这个Ransac(不求甚解。。。)。后面直到大伟哥面试趟坑被问到:
特征匹配要是遇到误匹配时,如何筛选处理?
答案就是用ransac算法进行过滤。
下面介绍一下ransac算法,下面为摘抄自:http://blog.csdn.net/fandq1223/article/details/53175964
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
一、示例
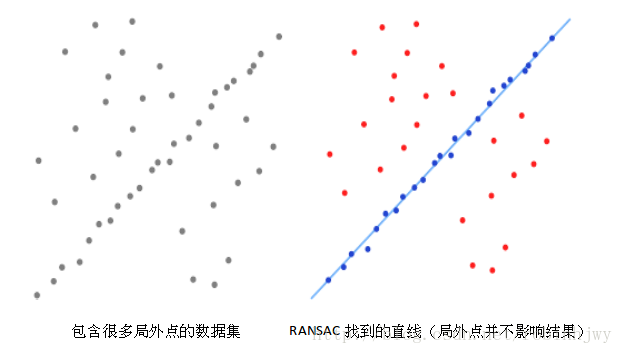
一个简单的例子是从一组观测数据中找出合适的2维直线。假设观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。
二、概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.首先我们先随机假设一小组局内点为初始值。然后用此局内点拟合一个模型,此模型适应于假设的局内点,所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点,将局内点扩充。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为此模型仅仅是在初始的假设的局内点估计的,后续有扩充后,需要更新。
5.最后,通过估计局内点与模型的错误率来评估模型。
整个这个过程为迭代一次,此过程被重复执行固定的次数,每次产生的模型有两个结局:
1、要么因为局内点太少,还不如上一次的模型,而被舍弃,
2、要么因为比现有的模型更好而被选用。
三、算法
伪码形式的算法如下所示:
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
iterations = 0
best_model = null
best_consensus_set = null
best_error = 无穷大
while ( iterations < k )
maybe_inliers = 从数据集中随机选择n个点
maybe_model = 适合于maybe_inliers的模型参数
consensus_set = maybe_inliers
for ( 每个数据集中不属于maybe_inliers的点 )
if ( 如果点适合于maybe_model,且错误小于t )
将点添加到consensus_set
if ( consensus_set中的元素数目大于d )
已经找到了好的模型,现在测试该模型到底有多好
better_model = 适合于consensus_set中所有点的模型参数
this_error = better_model究竟如何适合这些点的度量
if ( this_error < best_error )
我们发现了比以前好的模型,保存该模型直到更好的模型出现
best_model = better_model
best_consensus_set = consensus_set
best_error = this_error
增加迭代次数
返回 best_model, best_consensus_set, best_errorRANSAC算法的可能变化包括以下几种:
(1)如果发现了一种足够好的模型(该模型有足够小的错误率),则跳出主循环。这样可能会节约计算额外参数的时间。
(2)直接从maybe_model计算this_error,而不从consensus_set重新估计模型。这样可能会节约比较两种模型错误的时间,但可能会对噪声更敏感。
其实核心就是随机性和假设性。随机性用于减少计算了,那个循环次数就是利用正确数据出现的概率。所谓的假设性,就是说随机抽出来的数据我都认为是正确的,并以此去计算其他点,获得其他满足变换关系的点,然后利用投票机制,选出获票最多的那一个变换。
四、参数
我们不得不根据特定的问题和数据集通过实验来确定参数t和d。然而参数k(迭代次数)可以从理论结果推断。当我们从估计模型参数时,用p表示一些迭代过程中从数据集内随机选取出的点均为局内点的概率;此时,结果模型很可能有用,因此p也表征了算法产生有用结果的概率。用w表示每次从数据集中选取一个局内点的概率,如下式所示:
w = 局内点的数目 / 数据集的数目
通常情况下,我们事先并不知道w的值,但是可以给出一些鲁棒的值。假设估计模型需要选定n个点, wn w n 是所有n个点均为局内点的概率; 1−wn 1 − w n 是n个点中至少有一个点为局外点的概率,此时表明我们从数据集中估计出了一个不好的模型。 (1−wn)k ( 1 − w n ) k 表示算法永远都不会选择到n个点均为局内点的概率,它和1-p相同。因此,
我们对上式的两边取对数,得出:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1864
1864

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









