






4WID-4WIS整车动力学14自由度模型_simulink
软件使用:Matlab/Simulink
适用场景:采用模块化建模方法,搭建14自由度四轮驱动-四轮转向整车动力学模型,作为整车平台适用于多种工况场景。
产品simulink源码包含如下模块:
工况: 阶跃工况
整车模块:14自由度整车模型
包含模块:转向系统,整车系统,悬架系统,魔术轮胎pac2002,车轮系统,PI驾驶员模块等
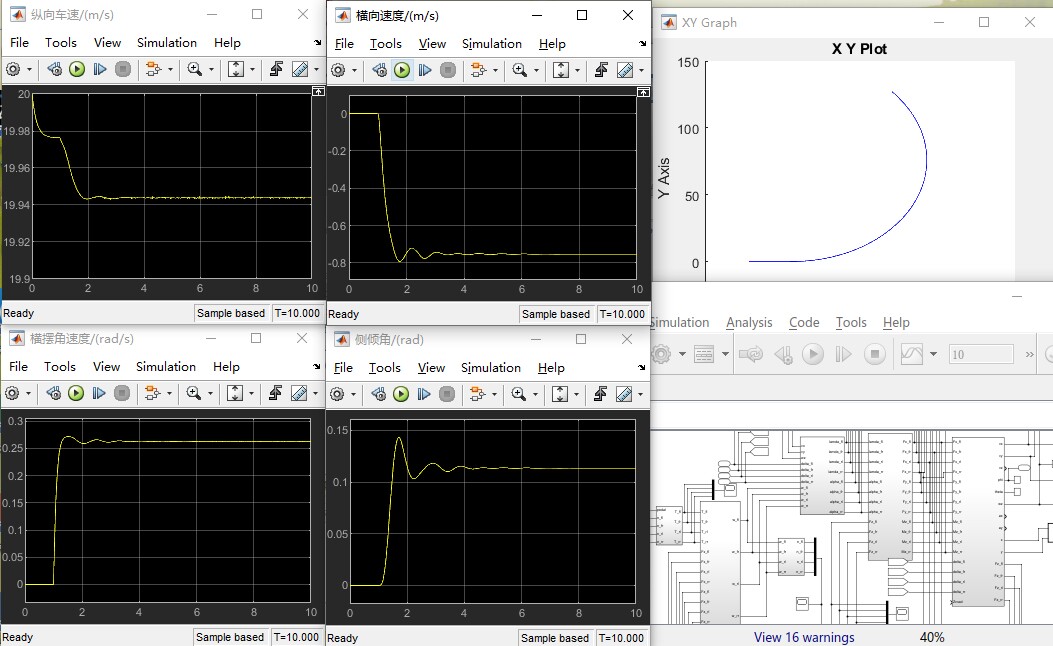
十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,四轮旋转和垂向自由度。
模型输入:四轮驱动力矩和四轮转向角度
包含:simulink源码文件,详细建模说明文档,对应参考资料
ID:82500646332064794
青青猪儿
4WID-4WIS整车动力学14自由度模型_simulink
一、引言
车辆动力学模型是研究车辆行驶性能和驾驶控制系统的重要工具。在车辆工程领域,为了更好地理解车辆在不同工况下的动态特性,研究人员开发了各种车辆动力学模型。本文介绍了一种基于Simulink的14自由度四轮驱动-四轮转向整车动力学模型,旨在提供一个灵活、模块化的模型来适用于多种工况场景。
二、模型概述
本模型采用了14自由度的整车动力学模型,包括整车纵向、横向、横摆、车身俯仰、侧倾、垂向跳动、四轮旋转和垂向自由度。通过对车辆的各个自由度进行建模,可以准确描述车辆在不同工况下的运动状态。
三、模型结构
-
工况模块
在模型中,我们提供了阶跃工况作为输入条件,以模拟车辆在不同负载变化下的响应。 -
整车模块
整车模块是模型的核心部分,包含了整车系统的各个组成部分,如转向系统、悬架系统、魔术轮胎pac2002、车轮系统、PI驾驶员模块等。这些模块共同组成了整车的运动学和动力学特性。 -
14自由度模块
14自由度模块是整车模型的核心,通过对整车在纵向、横向、横摆、车身俯仰、侧倾、垂向跳动、四轮旋转和垂向自由度的建模,可以更加准确地描述车辆的运动特性。
四、模型输入
模型的输入包括四轮驱动力矩和四轮转向角度。通过控制这两个输入量,可以模拟车辆在不同驾驶条件下的行驶特性。
五、模型应用
该模型适用于多种工况场景,可以帮助研究人员更好地理解车辆的动态特性和掌握车辆驾驶控制系统的设计方法。例如,在车辆制造商可以使用该模型来评估新车型的行驶性能、进行仿真测试和驾驶员行为分析。在驾驶辅助系统研发领域,该模型可以用于开发和优化车辆稳定性控制、路径跟踪控制和自动驾驶技术。
六、结论
本文介绍了基于Simulink的4WID-4WIS整车动力学14自由度模型。通过对车辆的各个自由度进行建模,并提供了相应的源码和建模说明文档,希望能为车辆工程领域的研究人员提供一个灵活、模块化的模型,以便更好地理解和探索车辆的动态特性。该模型可以适用于多种工况场景,并有助于车辆制造商和驾驶辅助系统研发人员的工作。
相关的代码,程序地址如下:http://imgcs.cn/646332064794.html
















 359
359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









