






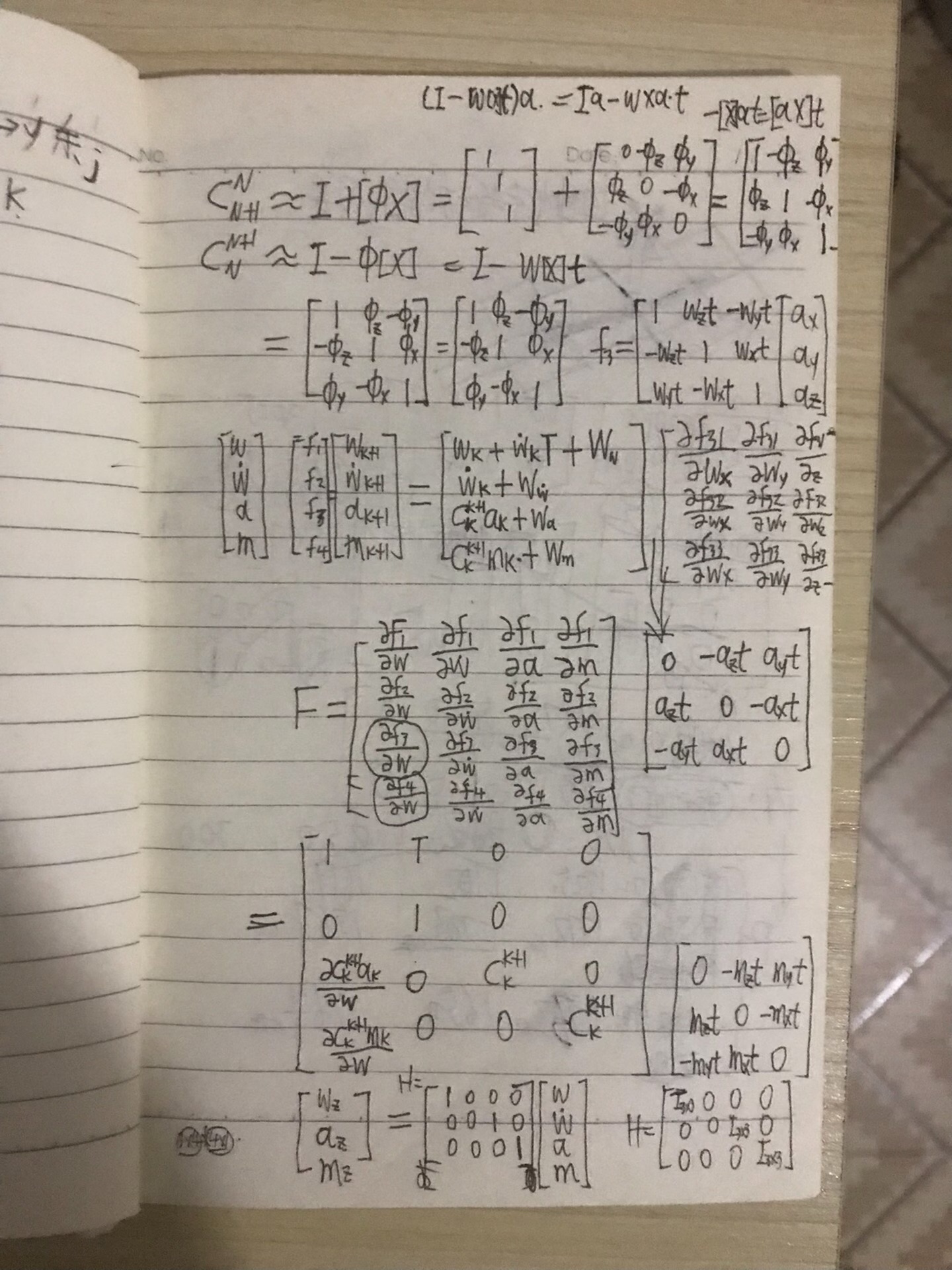
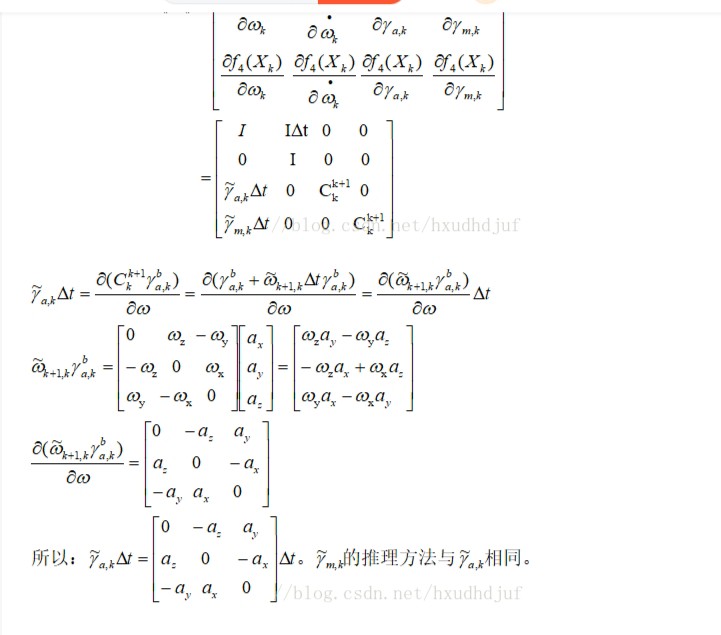
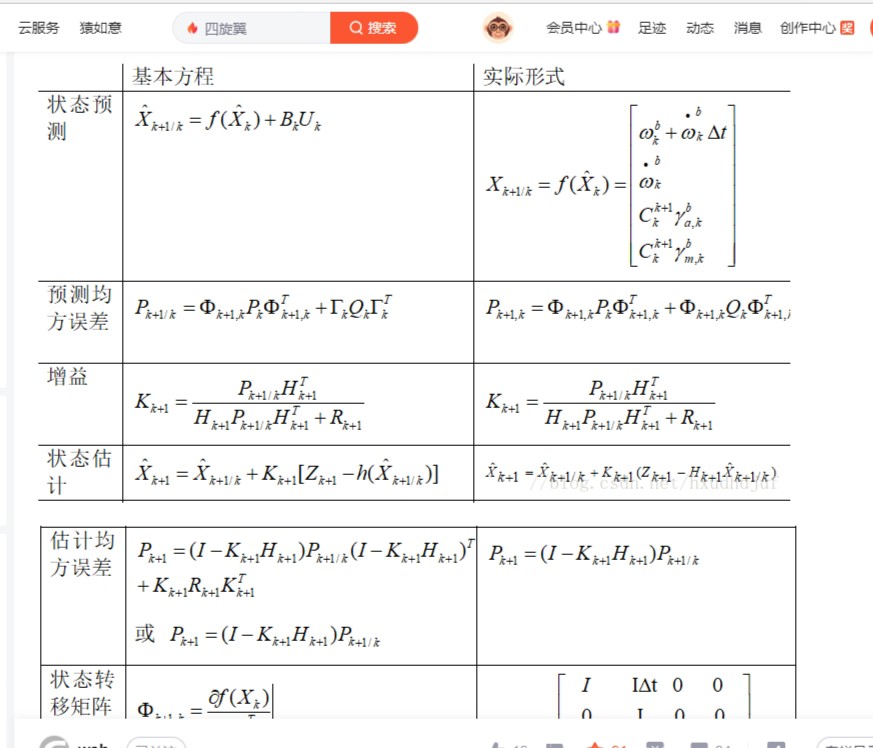
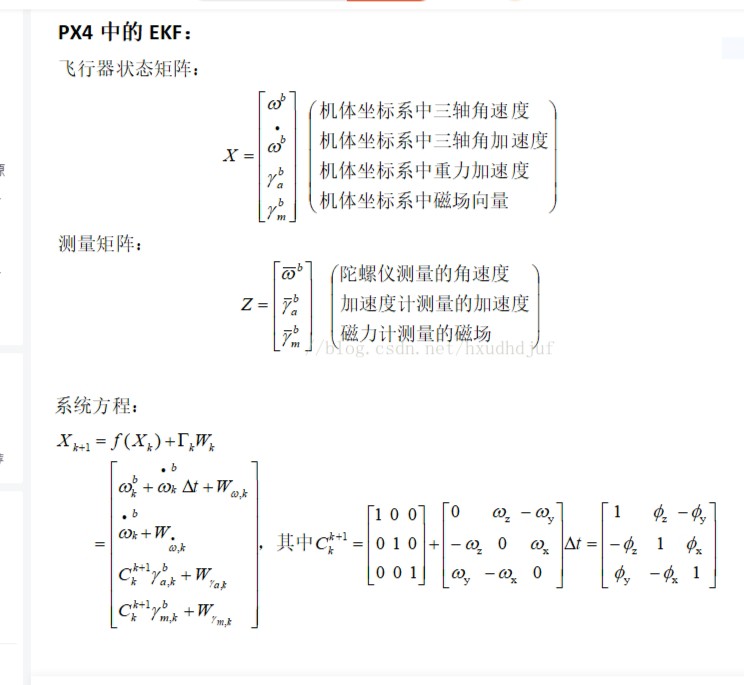
扩展卡尔曼滤波EKF程序,姿态解算,陀螺仪角速度小角模式算法,非四元数更新算法。
算法原理:利用陀螺仪小角姿态矩阵,把加速度,地磁数据估计值从上个状态旋转到下个状态,这作为时间迭代估计,再利用加计地磁实时测量值,来修正。
从而达到陀螺和加计地磁融合的目的。
最终,通过融合滤波后的加计和地磁直接算姿态角,省去了四元数。
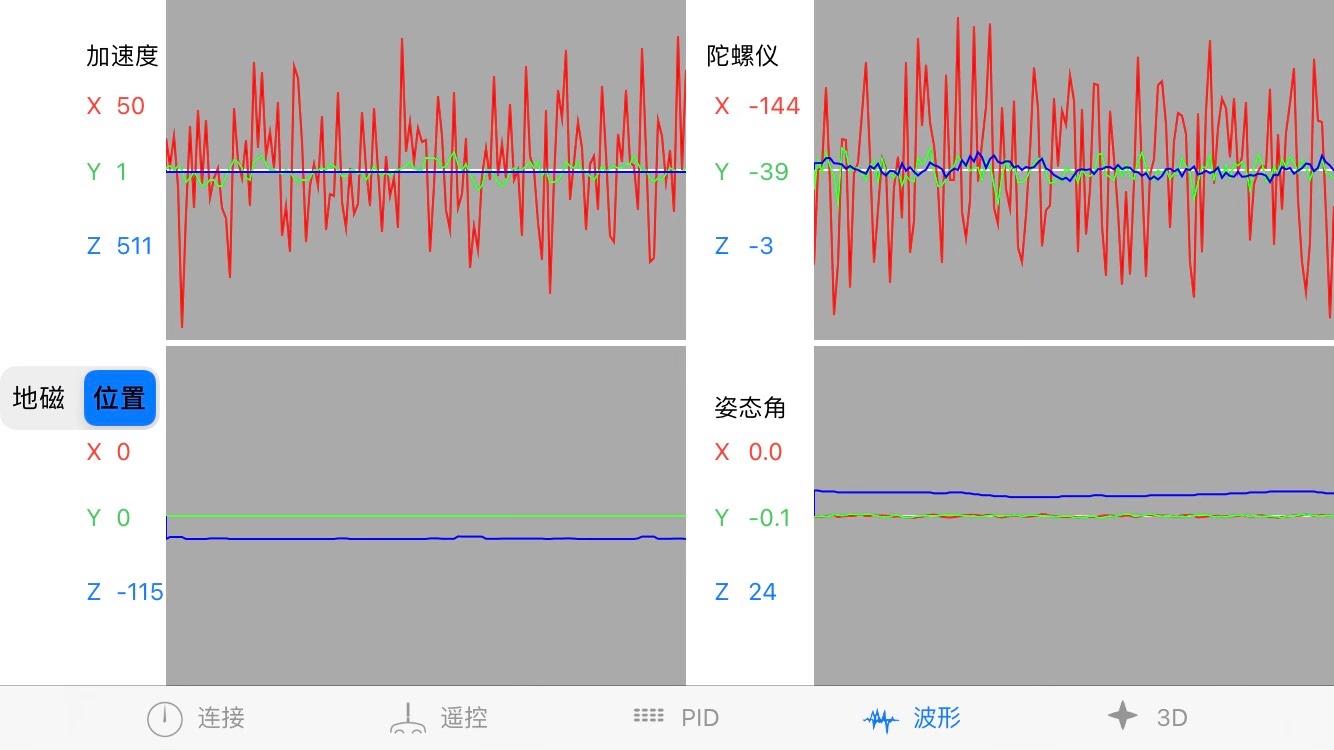
在主图所示,红色为滤波前,绿色为滤波后。
实验表明这种小角更新原理的精度远远超过四元数更新版本!!程序在stm32f407单片机运行,实时传到手机app显示!
ID:34120744119799381
宇宙横行

扩展卡尔曼滤波EKF程序,姿态解算,陀螺仪角速度小角模式算法,非四元数更新算法
在现代科技领域中,姿态解算是一项重要的技术,它被广泛应用于飞行器、导航系统和虚拟现实等领域中。而陀螺仪角速度小角模式算法是一种常用的姿态解算算法之一,它通过陀螺仪的角速度数据实时估计物体的姿态角度。
这种算法的原理是基于陀螺仪小角姿态矩阵,通过将加速度和地磁数据的估计值从上一个状态旋转到下一个状态来实现时间迭代估计。同时,利用加速度和地磁实时测量值对估计结果进行修正,从而实现陀螺仪和加速度、地磁数据的融合。最终,通过融合滤波后的加速度和地磁数据,可以直接计算出物体的姿态角,而无需使用四元数。
与传统的四元数更新版本相比,实验表明这种小角更新原理的精度更高。在实际应用中,本算法在stm32f407单片机上运行,并实时将数据传输到手机app进行显示。下图展示了滤波前后的数据对比,其中红色表示滤波前的数据,绿色表示滤波后的数据。
[插入滤波前后数据对比图]
这种姿态解算算法的应用不仅提高了姿态估计的精度,还简化了计算过程。在虚拟物品交易流程中,姿态解算算法的精确度对于购买方和卖方都非常重要。购买方与卖方进行联系并付款后,卖方会向购买方发送盘链接。购买方在确认收到物品后,卖方会再次发出提取码。
通过应用这种姿态解算算法,可以实时准确地显示出物品的姿态角度,从而增加了交易的可靠性和安全性。购买方可以通过手机app观察到物品的真实姿态,确保所购买的物品与描述相符,减少了交易风险。
综上所述,扩展卡尔曼滤波EKF程序,姿态解算,陀螺仪角速度小角模式算法是一种高精度、高可靠性的姿态解算算法,可以在虚拟物品交易中提供准确的物品姿态信息。该算法通过陀螺仪和加速度、地磁数据的融合,实现了姿态角的实时计算,为虚拟物品交易流程带来了更加安全、可靠的体验。
需要注意的是,本文仅介绍了算法的原理和应用,没有提供参考文献和示例代码。读者可以参考相关文献和资料,结合具体的硬件平台和应用场景,进行进一步的算法实现和优化。
【相关代码,程序地址】:http://fansik.cn/744119799381.html
















 921
921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









