






 本文介绍了基于Simulink的车辆ABS与ESC稳定性控制系统开发,包括PID控制器的优化、ANFIS道路估计器的应用、用户界面设计和3D动画展示,旨在提升车辆在不同路况下的制动性能和稳定性。
本文介绍了基于Simulink的车辆ABS与ESC稳定性控制系统开发,包括PID控制器的优化、ANFIS道路估计器的应用、用户界面设计和3D动画展示,旨在提升车辆在不同路况下的制动性能和稳定性。
车辆ABS与ESC稳定性控制系统开发,基于simulink与模糊控制,搭建ABS通过防止车轮抱死来工作,从而确保更短在不同路况下的制动距离以及保持可控性,车辆在突然制动情况下的稳定性。
ESP的主要功能是改进车辆的稳定性,防止在快速行驶过程中打滑和失控操纵。
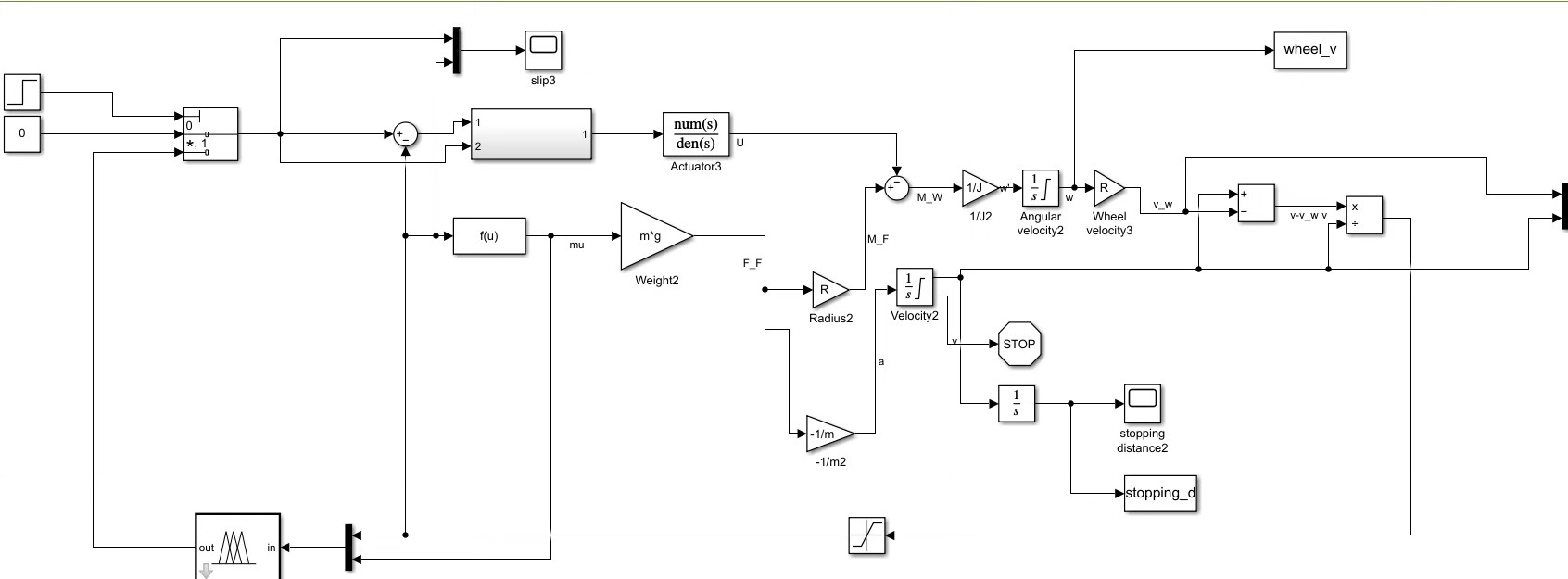
首先,选择的ABS控制器是PID。
因为上面提到的系统的非线性行为,控制器可以用遗传算法进行调整算法或粒子群优化技术。
为了确保系统在不同路况下的有效运行——ANFIS(自适应神经模糊推理系统)实现了道路估计器。
它使用车轮的摩擦系数来计算当前道路类型所需的打滑。
作为添加,创建了用户界面,其中可以进行优化和模拟。
还制作了3D动画,它展示了系统的工作原理,并与车辆的行为进行了比较没有ABS。
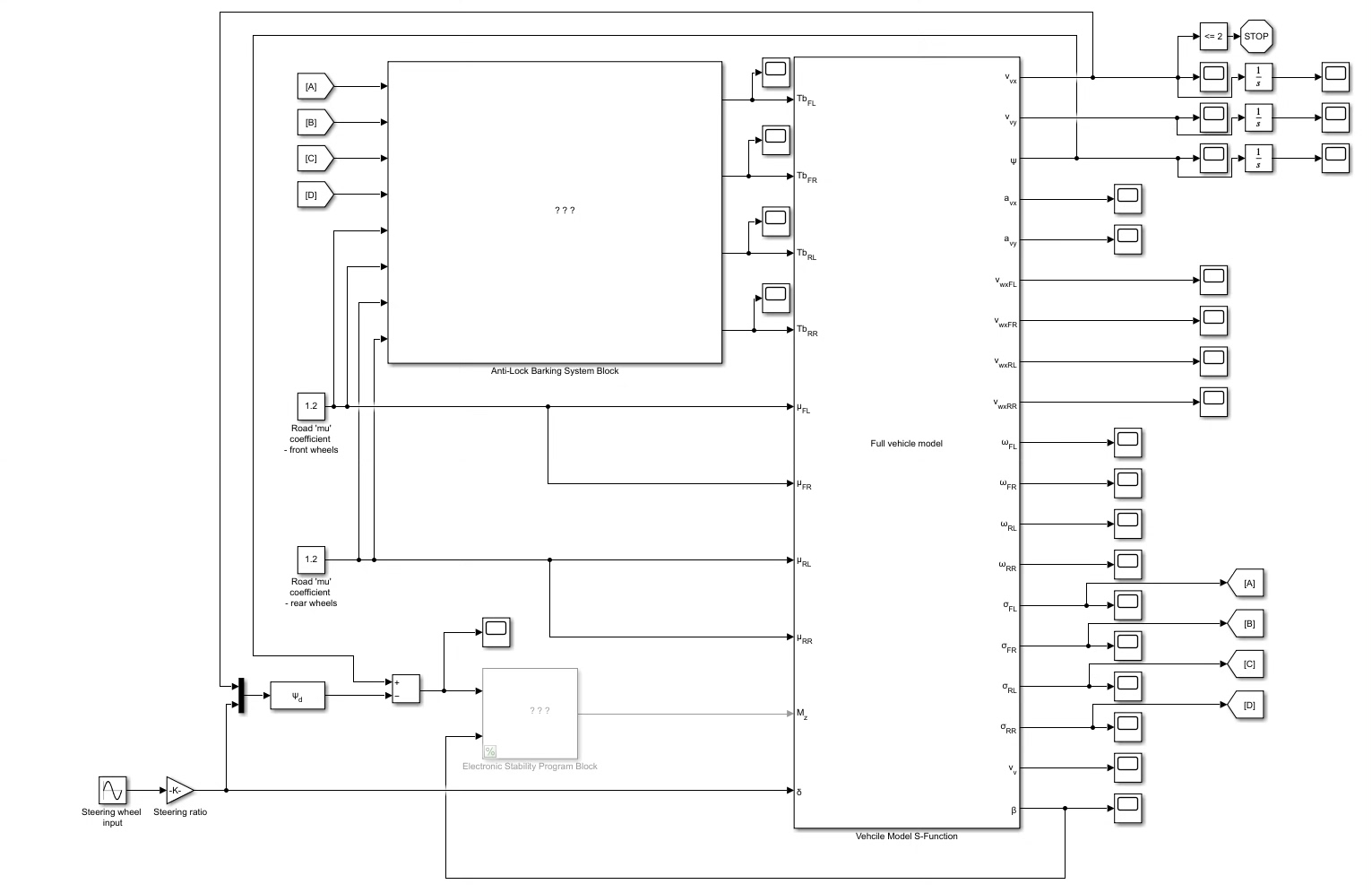
其次,设计了一个更复杂的整车模型,以描述仅是车辆在不同道路条件下的纵向动态而是横向动态。
然后增加了一个ABS和一个ESP控制器,它们采用模糊逻辑工作。
最后整个模型通过3D可视化完成,以演示具有和不具有上述安全系统的车辆的行为。
ID:9640727070940165
艾伦星聪明的玉竹


车辆ABS与ESC稳定性控制系统开发,基于Simulink与模糊控制,旨在通过防止车轮抱死来提高车辆的制动性能并确保在不同路况下的制动距离和稳定性。本文将介绍系统的整体设计以及各个模块的功能与实现方式。
首先,关于ABS控制器的选择,本文选用了PID控制器。由于系统存在非线性行为,因此可以通过遗传算法或粒子群优化技术对控制器进行参数调整,从而达到最佳的制动效果。
为了确保系统在不同路况下的有效运行,本文引入了ANFIS(自适应神经模糊推理系统)作为道路估计器。该估计器利用车轮的摩擦系数来计算当前道路类型所需的打滑情况,从而对制动力进行更加准确的调节。
为了方便用户对系统进行优化和模拟,本文还设计了一个用户界面。用户可以通过该界面对系统进行参数调整,以满足不同场景下的需求。
除了用户界面,本文还制作了3D动画,用于展示系统的工作原理,并与没有ABS系统的车辆进行比较。通过该动画,用户可以更直观地了解ABS系统对制动效果的影响,进而更好地理解系统的工作原理。
此外,本文还设计了一个更复杂的整车模型,以描述车辆在不同道路条件下的纵向和横向动态。在这个模型中,不仅包含了ABS系统,还增加了ESP(电子稳定性程序)控制器,用于改善车辆在高速行驶过程中的稳定性,防止打滑和失控操纵。
最后,为了更加形象地展示系统的效果,本文使用3D可视化技术对整个模型进行演示。通过演示,用户可以清楚地观察到具有和不具有上述安全系统的车辆在不同场景下的行为差异,从而更好地理解系统的价值。
综上所述,车辆ABS与ESC稳定性控制系统的开发基于Simulink与模糊控制,通过ABS系统和ESP控制器的配合,实现了在不同路况下的制动性能优化和车辆稳定性的提升。通过引入ANFIS作为道路估计器,系统能够更准确地调节制动力,以应对不同的道路条件。此外,通过用户界面、3D动画和整车模型的设计与实现,用户可以更直观地了解系统的工作原理和效果。通过3D可视化技术的应用,用户可以更加形象地观察到具有和不具有上述安全系统的车辆的行为差异。这些技术和方法的综合应用,为车辆安全性能的提升提供了一种有效的解决方案。
以上相关代码,程序地址:http://wekup.cn/727070940165.html















 591
591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









