






文章目录
导航电文的组成和作用
导航电文是一组二进制数码序列,包含多种与导航相关的信息,卫星的星历,卫星的工作状态,对流层误差改正,电离层误差改正参数,卫星钟改正参数。也称D码。
各种导航系统的载波信号
GPS:L1(1575.42MHz,19cm)L2(1227.60MHz,24cm)L5(1176.45MHz,25cm)
Beidou:B1 (1575.42MHz),B2(B2A:1176.45MHz), B3
GaLiLeo:E1(1575.42MHz)E5a(1176.45MHz)E6
各种导航系统的星座(组成部分)
| GPS | GLONASS | GaLileo | BDS | |
|---|---|---|---|---|
| 卫星个数 | 24 | 24 | 30 | 30(3GEO+3IGSO+24MEO) |
| 轨道面 | 6 | 3 | 3 | 1+3+3 |
| 轨道倾角 | 55 | 64.8 | 56 | 55 |
| 轨道高度 | 20200Km | 19130Km | 23200 | 21528 |
| 运行周期 | 11h58m | 11h15m | 14h4m | 12h53m |
其中GEO(GeoStationary Earth Orbit)地球同步静止轨道,在赤道面上,随地球一起旋转,IGSO (Inclined GeoSynchronous Orbit)倾斜地球同步轨道,与赤道面有一个夹角,卫星星下点运动轨迹成8字形,MEO(Medium Earth Orbit)中圆地球同步轨道。
区域卫星导航系统
QZSS 日本 4颗
IRNSS 印度 7颗
GPS的现代化
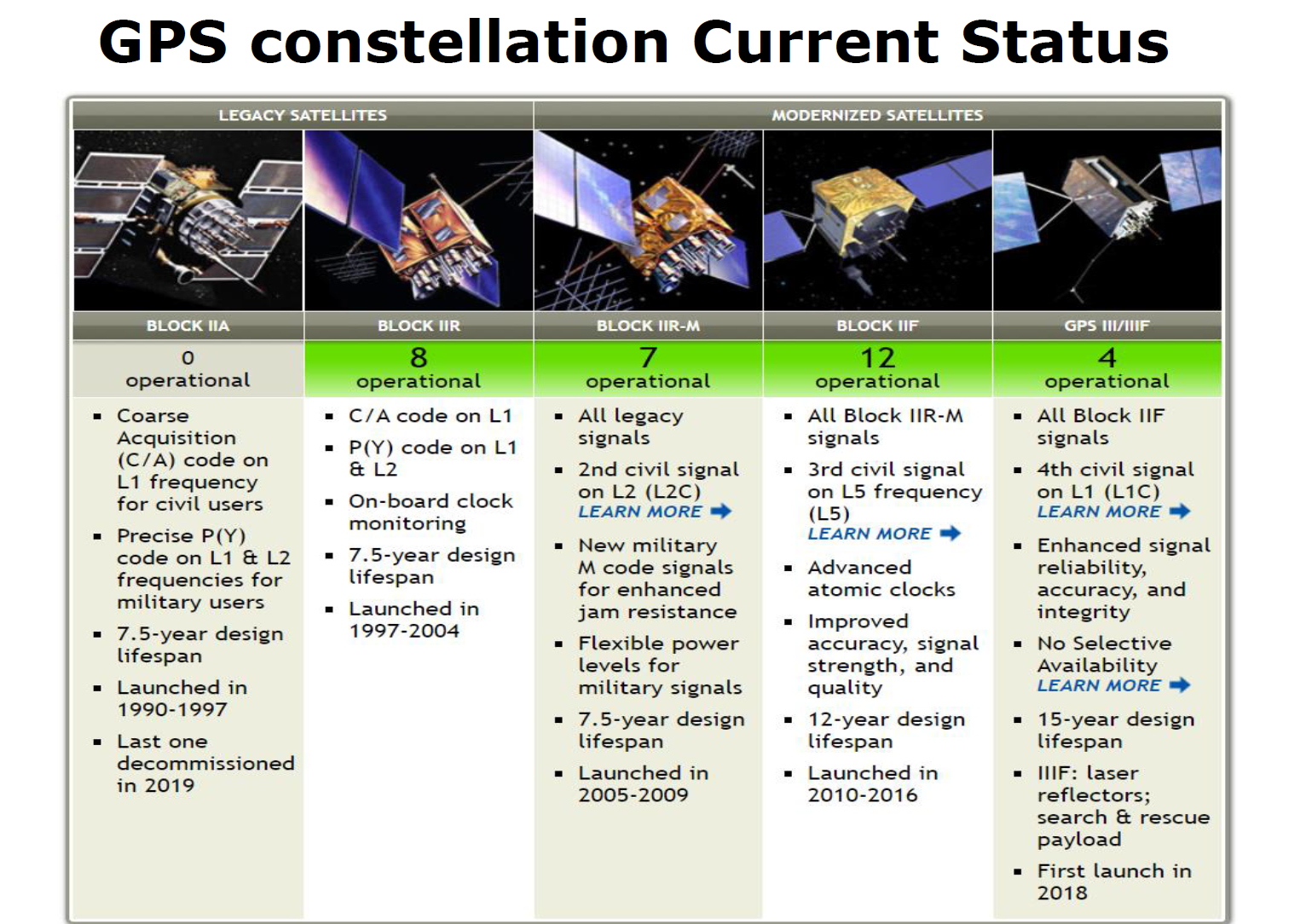
GPS IIA,只有L1频段可获取(粗码),L2频段(精码)被用于军事,目前被淘汰
GPS IIR L1,L2双频 目前8颗
GPS IIR—M L1,L2,L2C,其中以c为后缀代表民用即civil。目前7颗
GPS IIF L1,L2,L2C,L5 目前12颗
GPS III L1,L1C,L2,L2C,L5 目前4颗
GNSS的组成部分
空间部分
地面控制部分
主控站(Master Control Station):(接收监测站的数据,计算出卫星星历,卫星钟改正数,电离层,对流层改正参数等,在必要的 时候调整卫星的轨道参数和高精度时钟保持高精度,将数据发送给注入站)
监测站(Monitor Station):(监测卫星的信号和状态,将数据发送给主控站)
注入站(Uploading Station):(将卫星的状态变化和改正参数等上传给卫星)
用户部分
星基增强系统
星基增强系统:是一种用于提升卫星导航定位精度,可靠性,可用性的技术。通过部署地面基站和监测设施,利用地球同步静止轨道卫星搭载卫星导航系增强信号转发器,向用户播发星历误差,卫星钟误差改正,对流层,电离层改正参数等信息,实现对原有的卫星导航系统定位精度的改进。
WAAS(Wide Area Augmentation System)美国
EGNOS 欧洲
MSAS 日本
GAGAN 印度
SDCM 俄罗斯
FDMA和CDMA的区别
FDMA(Frequceny Division Multiple Access )频分多址技术,其中带宽被分为各种频段,每个卫星都被分配到一个频段来发送数据,该频段在任何时候都为特定的卫星保留。GLONASS采用该技术。
CDMA(Code Division Multiple Access)码分多址技术,所有的卫星可同时传输数据,允许每个卫星在一整个频率上传输数据,多个同时传输的数据被不同的代码序列分割。除GLONASS外所有导航系统均采用CDMA技术。
FDMA成本高,灵活性差,传输速率变化困难。
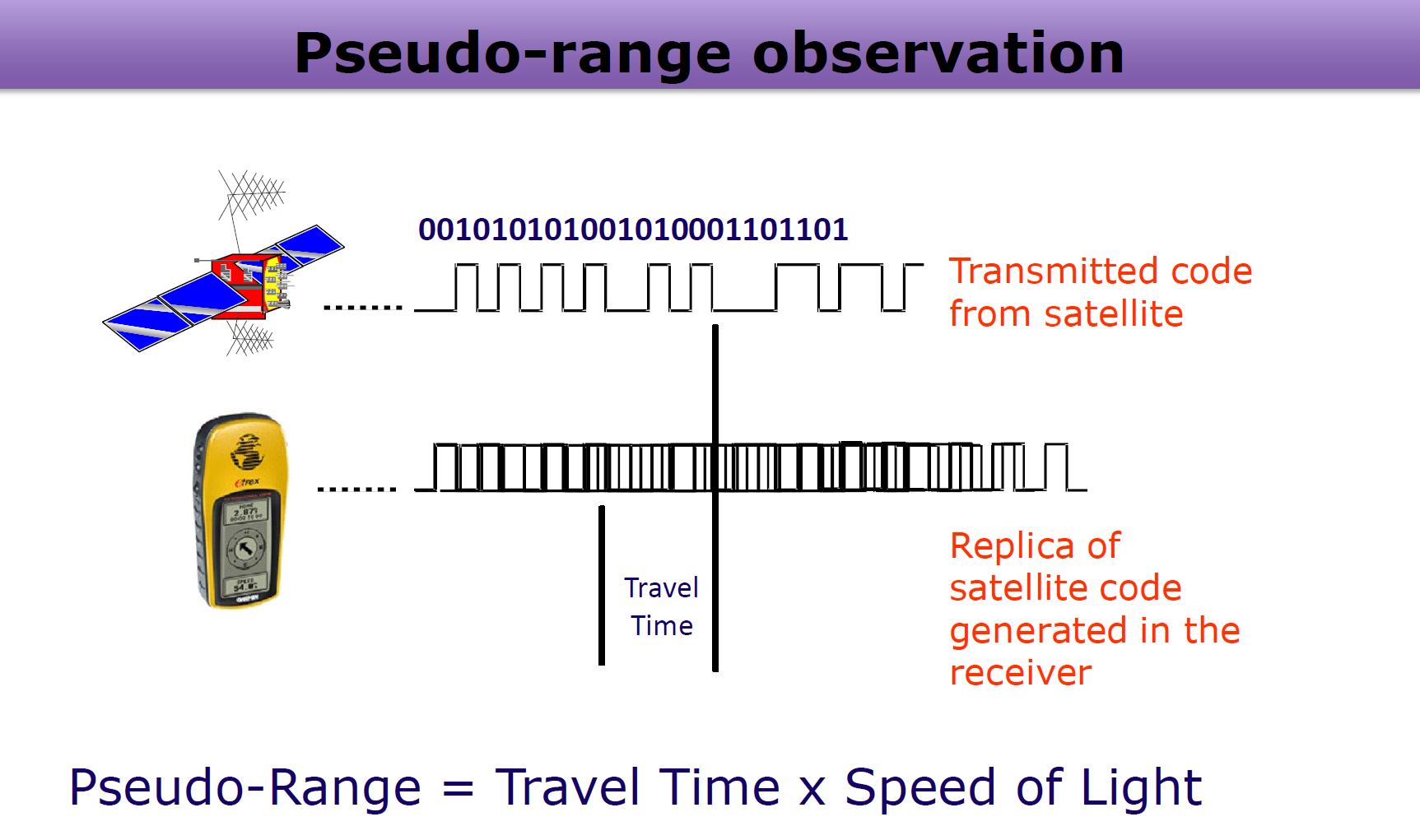
伪距测量原理(伪距单点定位)
测距码被调制在载波上,由卫星发出,接收机接收。卫星和接收机在各自的时钟控制下同步产生相同的测距码,卫星发送测距码A经过一定时间后,接收机接收瞬间的测距码为B,两个测距码进行比对,得到码元差换算为时间,计算得到距离。
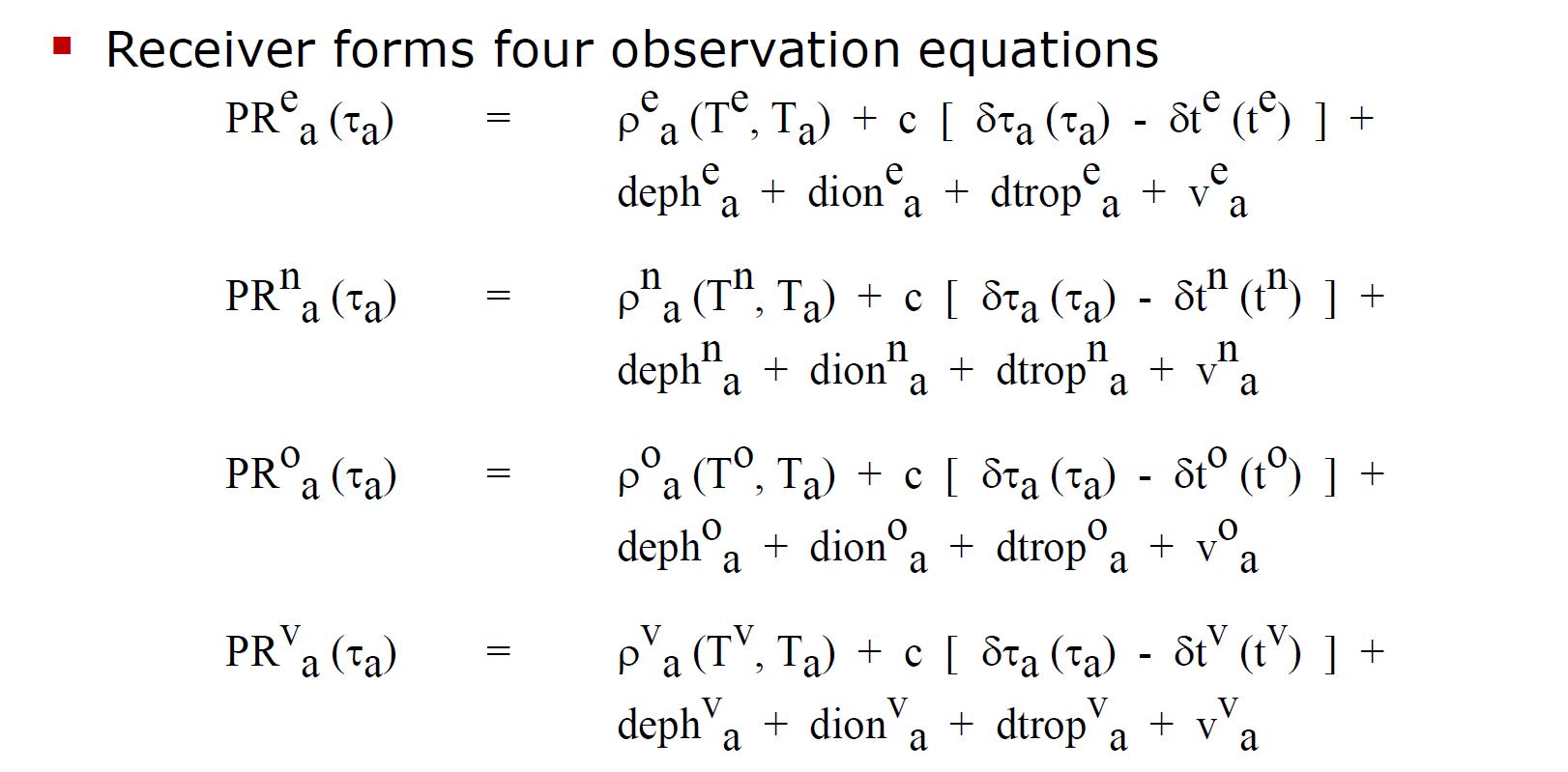
伪距单点定位方程如下:
其中公式中从左至右依次为卫星到接收机的伪距,空间几何距离,接收机和卫星的时钟误差,星历误差,电离层误差,对流层误差,其他误差。
精密单点定位(Precise Point Positioning )
它是利用单台接收机的载波相位观测值和伪距观测值以及IGS提供的高精度卫星星历和卫星钟差产品,对各类误差进行精确改正,进行高精度单点定位的方法。
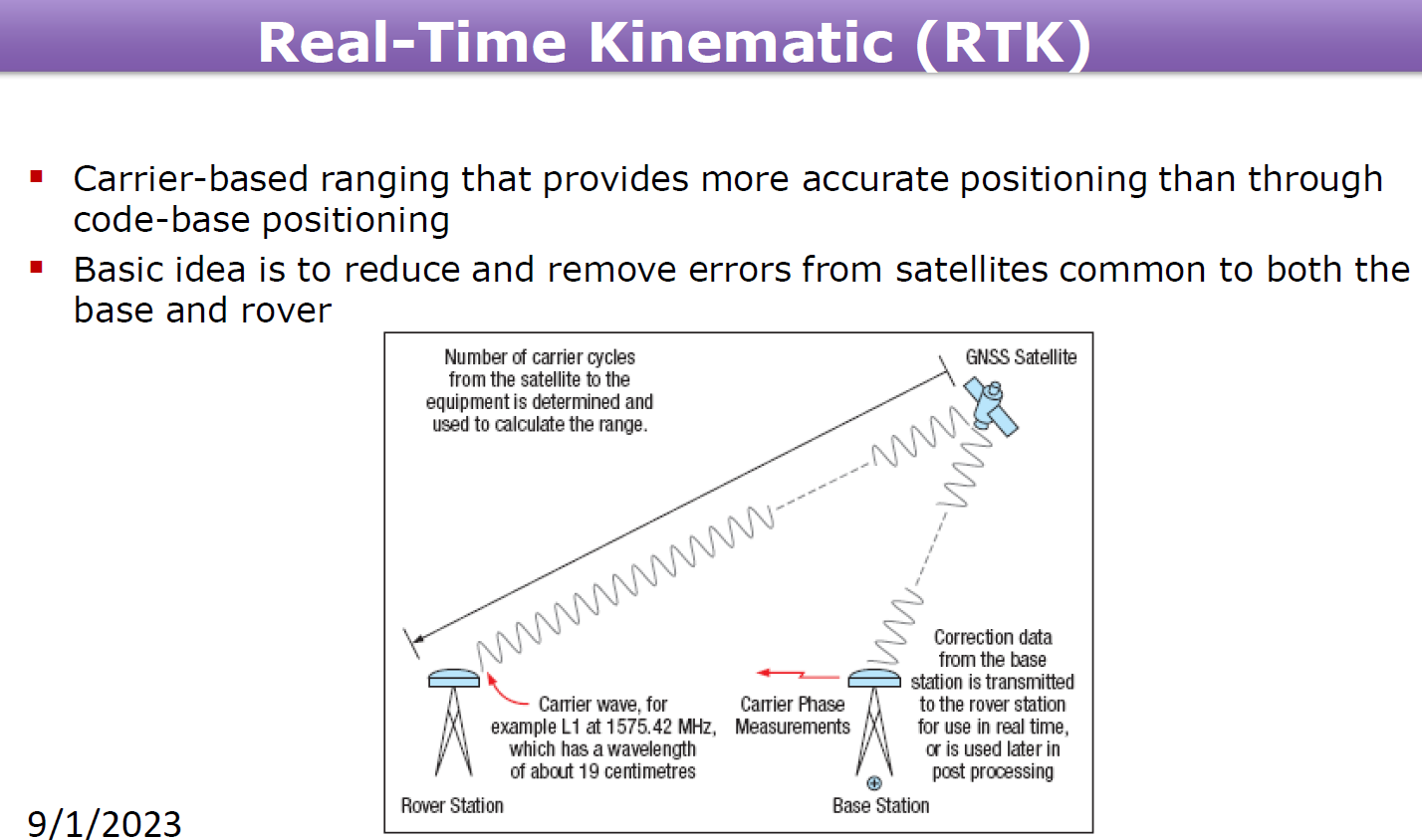
载波相位差分技术(RTK)
首先,基准站接收卫星的信号,通过数据链(无线通信)将信号发送给流动站,流动站同时也接收来自卫星的数据,流动站在基准站的数据和自身数据的基础上通过相对定位原理进行实时差分运算,解算得到流动站的三维坐标
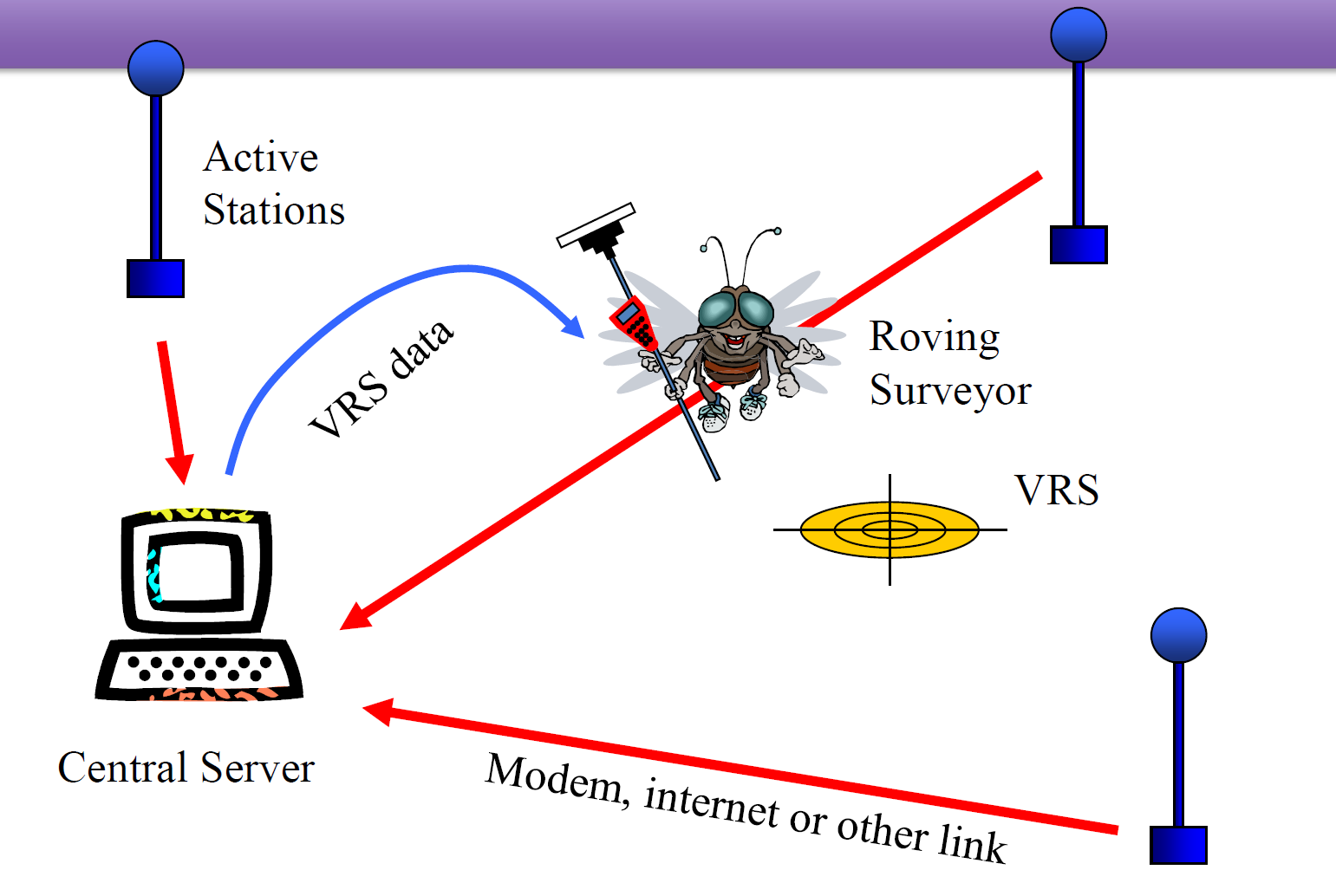
网络RTK(CORS,VRS)
网络RTK:在一个区域内建立三个或以上的基准站形成基准站网,GNSS用户在此区域内测量时,其观测值的改正数可通过附近的基准站观测值改正数内插并实时发送给用户。
VRS:Virtual Reference Station 虚拟参考站技术,是利用地面布设的多个参考站组成的连续运行参考站网(CORS Continuous Operational Reference System)利用各个参考站的观测信息,建立精确的误差模型,由计算机在移动站附近生成一组固定的基准站,将高精度的差分信号发送给移动站,这个差分信号的效果相当于在移动站附近生成了一个虚拟的参考基站,通常VRS与移动站的基线只有几米,解决了传统RTK由于基线长度过长带来的误差,提高了定位精度。
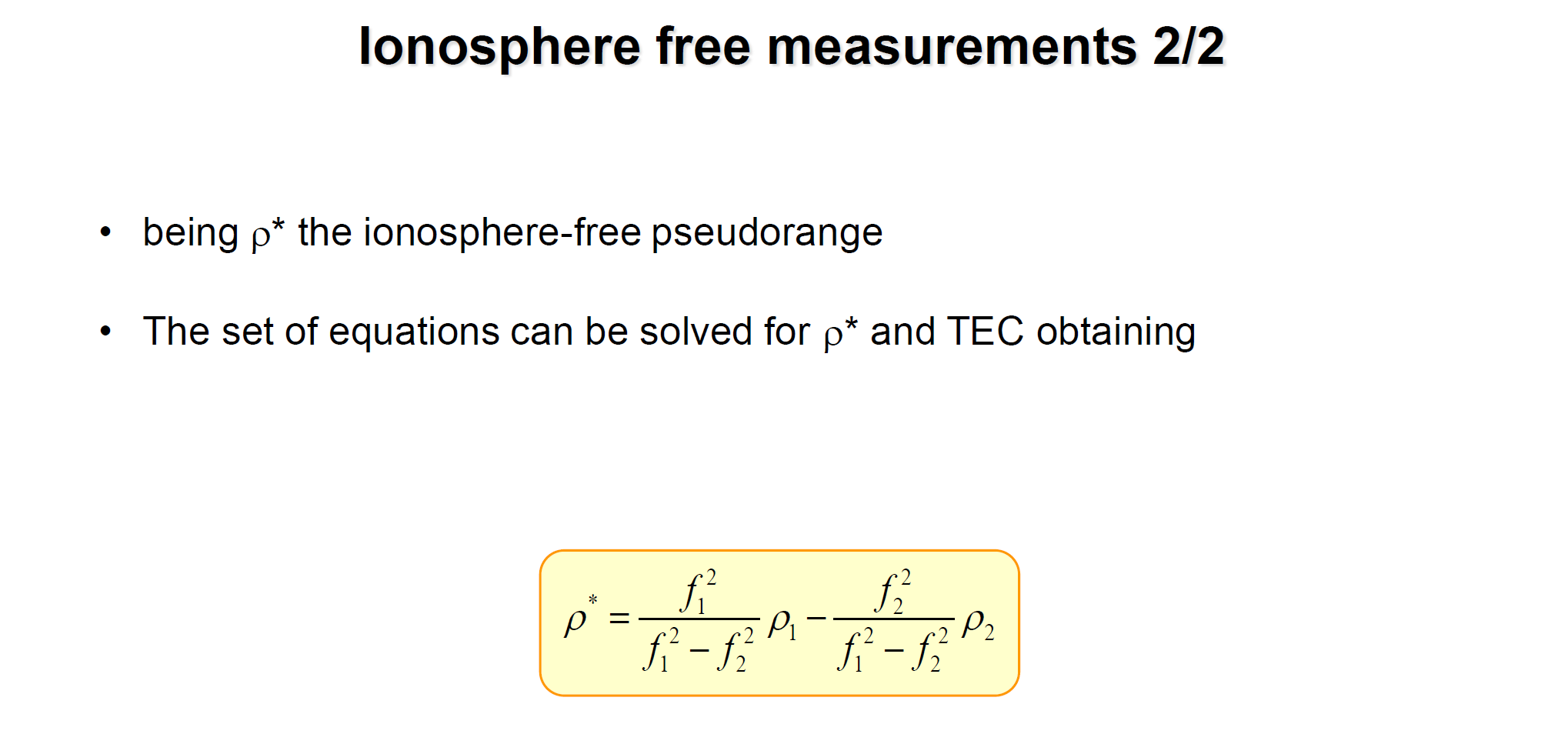
无电离层模型
Ionosphere free model如下图。
SLR和VLBI原理
Satellite Laser Ranging 卫星激光测距
利用卫星信号往返所需的时间,测定地球表面某点与卫星的距离,精度达mm级,地面上的测量点与卫星之间的距离变化可以反映地球表面的形变情况,通过长时间的测量可以得到地球表面的形变和时空变化规律。
SLR可以用来确定地球质心,坐标轴指向(Orientation),和尺度(Scale)。
Very Long BaseLine Interferometry 甚长基线干涉测量
使用地球上多个分散的射电望远镜站点进行观测,所有站点观测同一目标天体的射电信号,每个射电望远镜接收信号的时间不同,通过时间差测定两个站之间的距离。
VLBI可用来确定坐标轴指向和尺度。
IGS相关知识
International GNSS Service 提供全球卫星导航定位系统,精密卫星星历,卫星钟差以及相应卫星系统的地面基准站的坐标等信息。
IGS收集、存档、分发GNSS观测数据集,这些数据集精度较高,满足广泛应用和实验。
产品:IGS基准站的坐标和速度
精密星历,精密钟差
地球坐标指向等参数
目标:改进ITRF框架,监测地球变形,电离层、对流层研究,卫星定轨
ITRF和ITRS
论述太阳活动对GNSS的影响
当太阳活动较为剧烈时,电离层会产生剧烈且不规则的变化。在电离层中会出现一种空腔气泡结构,它会对GNSS信号造成(散射,衍射等)也称电离层闪烁,对信号造成干扰如相位和振幅的变化,影响导航定位的精度,通常出现在极地地区和赤道附近。
GNSS误差
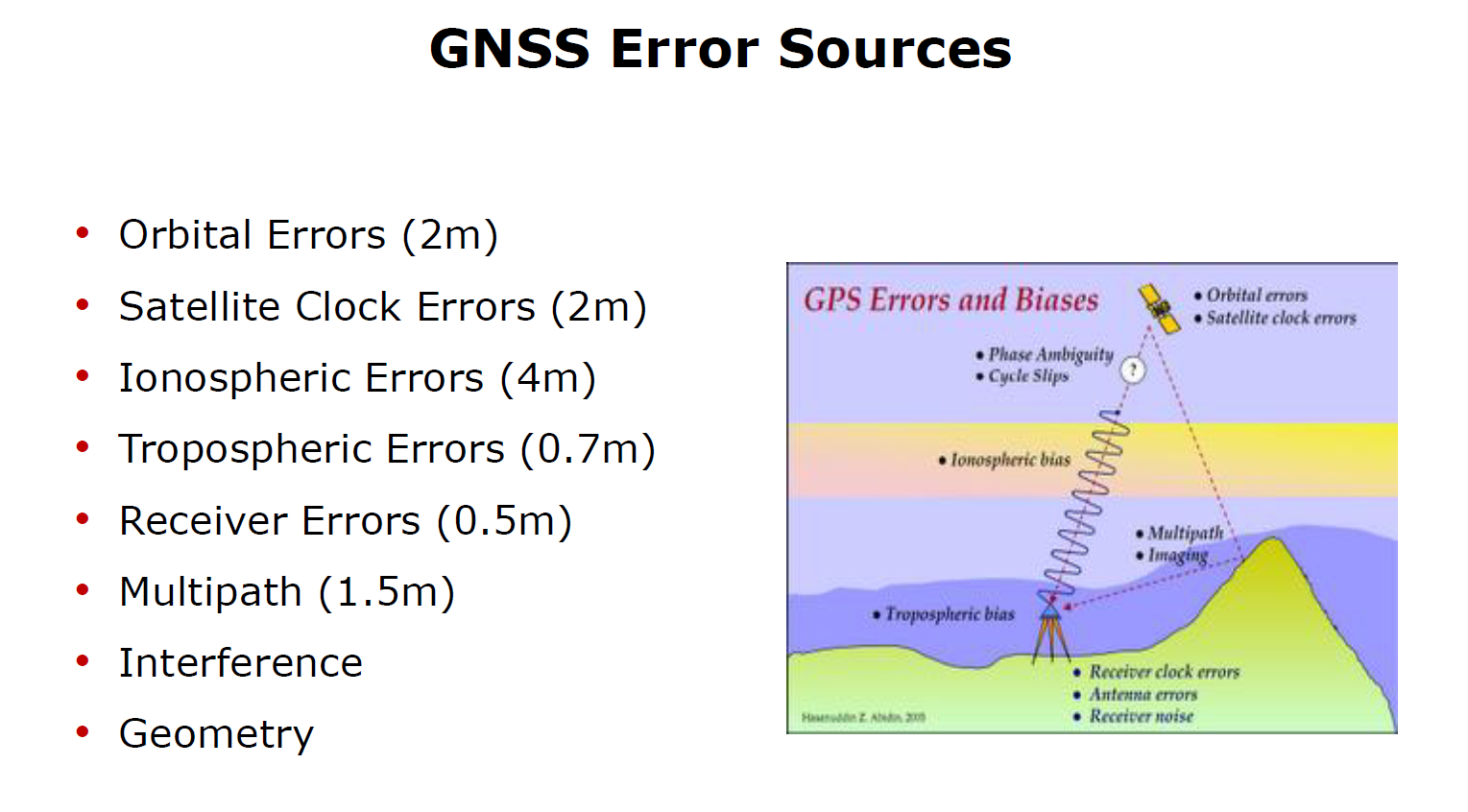
卫星部分:星历误差,卫星钟差,相对论效应
大气部分:对流层折射误差,电离层延迟误差,多路径误差
接收机部分:接收机钟差,接收机天线相位中心误差
减弱星历误差的方法:轨道松弛法,同步观测值求差法
减弱电离层误差的方法:利用双频或多频观测技术,利用电离层经验公式改正,差分
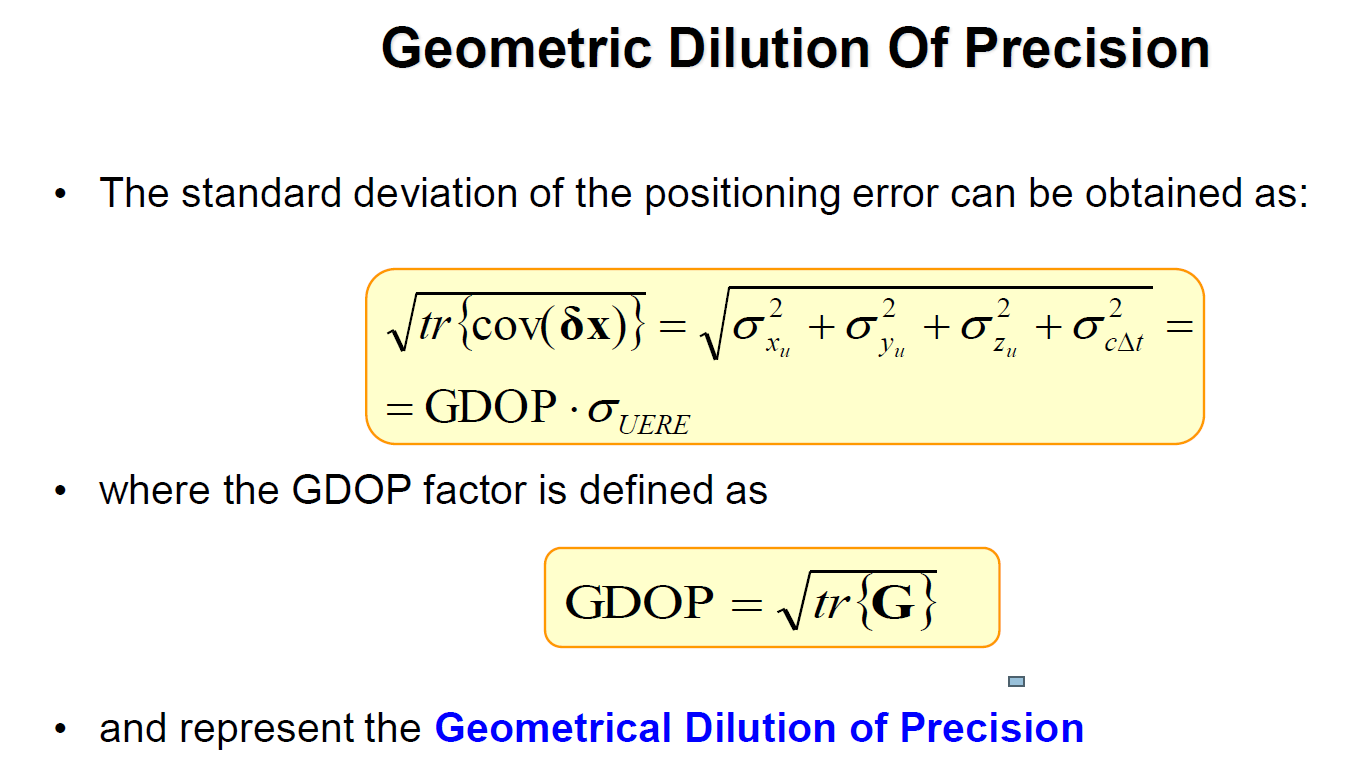
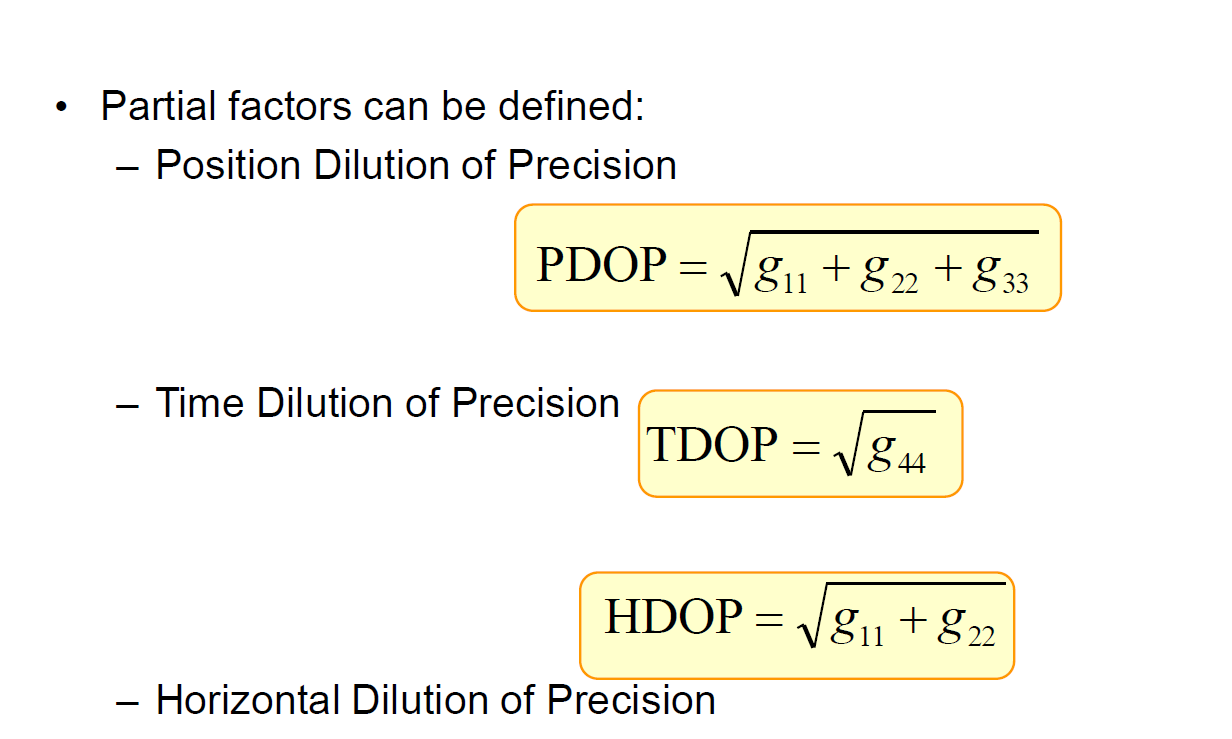
几何误差:观测结果的好坏与被测量的人造卫星和接收机间的几何形状有关且影响甚大,所以计算上述所引起的误差量为精度的强弱度,Dop值越小,误差越小,卫星分布情况越好。
GDOP(Geometrical Dilution of Precision)几何精度因子
PDOP(Position Dilution of Precision)位置精度因子
HDOP(Horizontal Dilution of Precision)水平精度因子
TDOP(Time Dilution of Precision)时间精度因子
GNSS的应用
军事:能够全天候,全天时提供卫星导航、定位、授时服务,提供时空基准。
交通:车辆自主导航,无人驾驶中的核心技术之一
农业:实现精准农田,无人自动化耕种和收割。
电力:提供电力全网时间基准统一。
测绘:速度快,精度高,快速得到三维坐标。建立和维持地球参考框架,建立地面控制网,精化大地水准面。
进行电离层反演等。
GNSS的应用
军事:能够全天候,全天时提供卫星导航、定位、授时服务,提供时空基准。
交通:车辆自主导航,无人驾驶中的核心技术之一
农业:实现精准农田,无人自动化耕种和收割。
电力:提供电力全网时间基准统一。
测绘:速度快,精度高,快速得到三维坐标。建立和维持地球参考框架,建立地面控制网,精化大地水准面。
进行电离层反演等。















 3716
3716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









