






PCL保存及加载不同格式点云对比
前言
PCL中的IO库提供了点云文件输入输出相关的操作类,IO模块利用50多个类与30多个函数来实现点云的获取、读入、存储等。本文以PCL中常见的数据格式PLY和PCD为例,比较不同格式文件的保存以及读取差异。(加载PCD格式点云时,文件名中有中文会报错)测试文件
一、PCL保存为PLY和PCD大小比较
#include <iostream>
#include <opencv2/opencv.hpp>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <chrono>
using namespace std;
int main()
{
cv::TickMeter tm;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("lucy.pcd", *cloud);
//PCD
tm.start();
pcl::io::savePCDFileBinary("lucy_binary.pcd", *cloud);
tm.stop();
std::cout << "save pcd binary cost time: " << tm.getTimeMilli()<<" ms" << endl;
tm.start();
pcl::io::savePCDFileASCII("lucy_ascii.pcd", *cloud);
tm.stop();
std::cout << "save pcd ascii cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
pcl::io::savePCDFileBinaryCompressed("lucy_binaryCompressed.pcd", *cloud);
tm.stop();
std::cout << "save pcd binary_compressed cost time: " << tm.getTimeMilli() << " ms" << endl;
//PLY
tm.start();
pcl::io::savePLYFileBinary("lucy_binary.ply", *cloud);
tm.stop();
std::cout << "save ply binary cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
pcl::io::savePLYFileASCII("lucy_ascii.ply", *cloud);
tm.stop();
std::cout << "save ply ascii cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
system("pause");
return 0;
}
耗时:
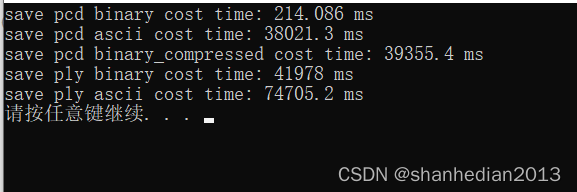
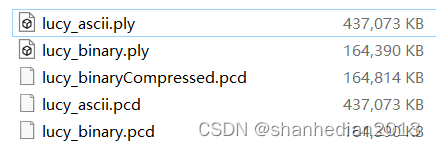
保存文件大小:
二、加载不同格式点云时间对比
#include <iostream>
#include <opencv2/opencv.hpp>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <chrono>
using namespace std;
int main()
{
cv::TickMeter tm;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
//PCD
tm.start();
pcl::io::loadPCDFile("lucy_binary.pcd", *cloud);
tm.stop();
std::cout << "load pcd binary cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
pcl::io::loadPCDFile("lucy_ascii.pcd", *cloud);
tm.stop();
std::cout << "load pcd ascii cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
pcl::io::loadPCDFile("lucy_binaryCompressed.pcd", *cloud);
tm.stop();
std::cout << "load pcd binary_compressed cost time: " << tm.getTimeMilli() << " ms" << endl;
//PLY
tm.start();
pcl::io::loadPLYFile("lucy_binary.ply", *cloud);
tm.stop();
std::cout << "load ply binary cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
pcl::io::loadPLYFile("lucy_ascii.ply", *cloud);
tm.stop();
std::cout << "load ply ascii cost time: " << tm.getTimeMilli() << " ms" << endl;
tm.start();
system("pause");
return 0;
}
耗时:
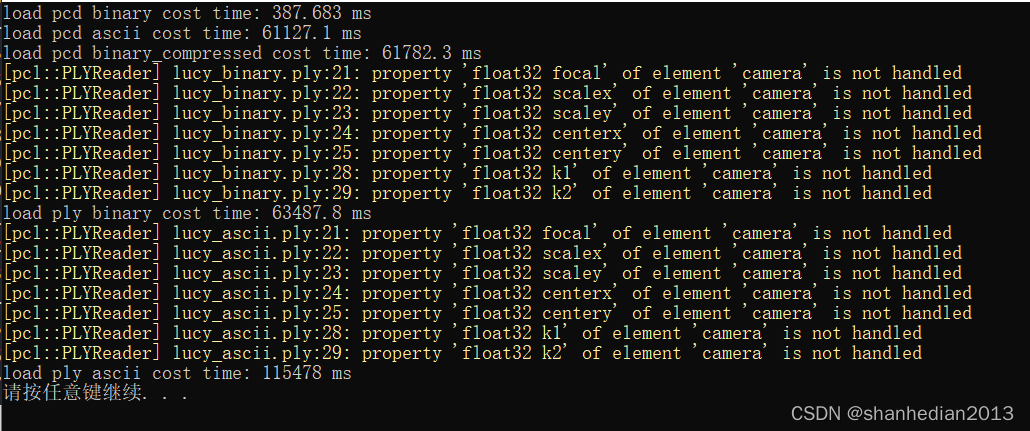
总结
通过上述测试可知,保存文件未binary格式,所占体积最小,加载时,读取binary格式的点云速度最快。

















 565
565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











