摄像测量相关
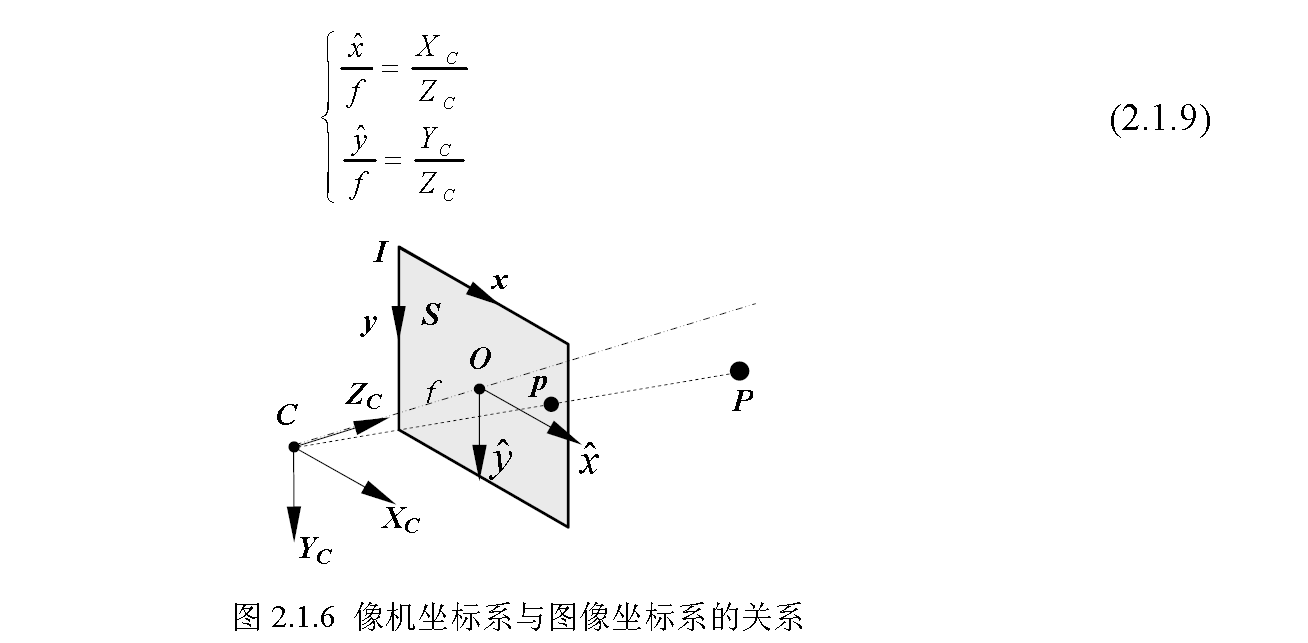
基本摄像关系


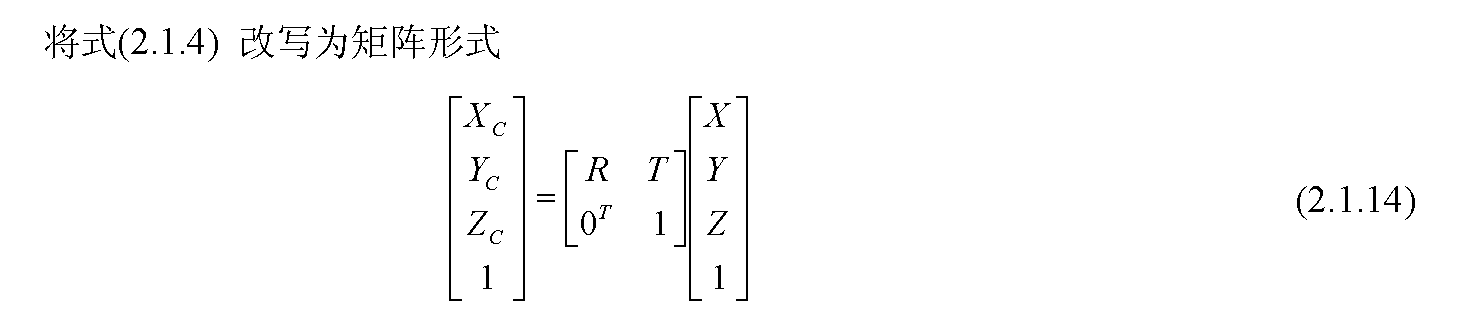
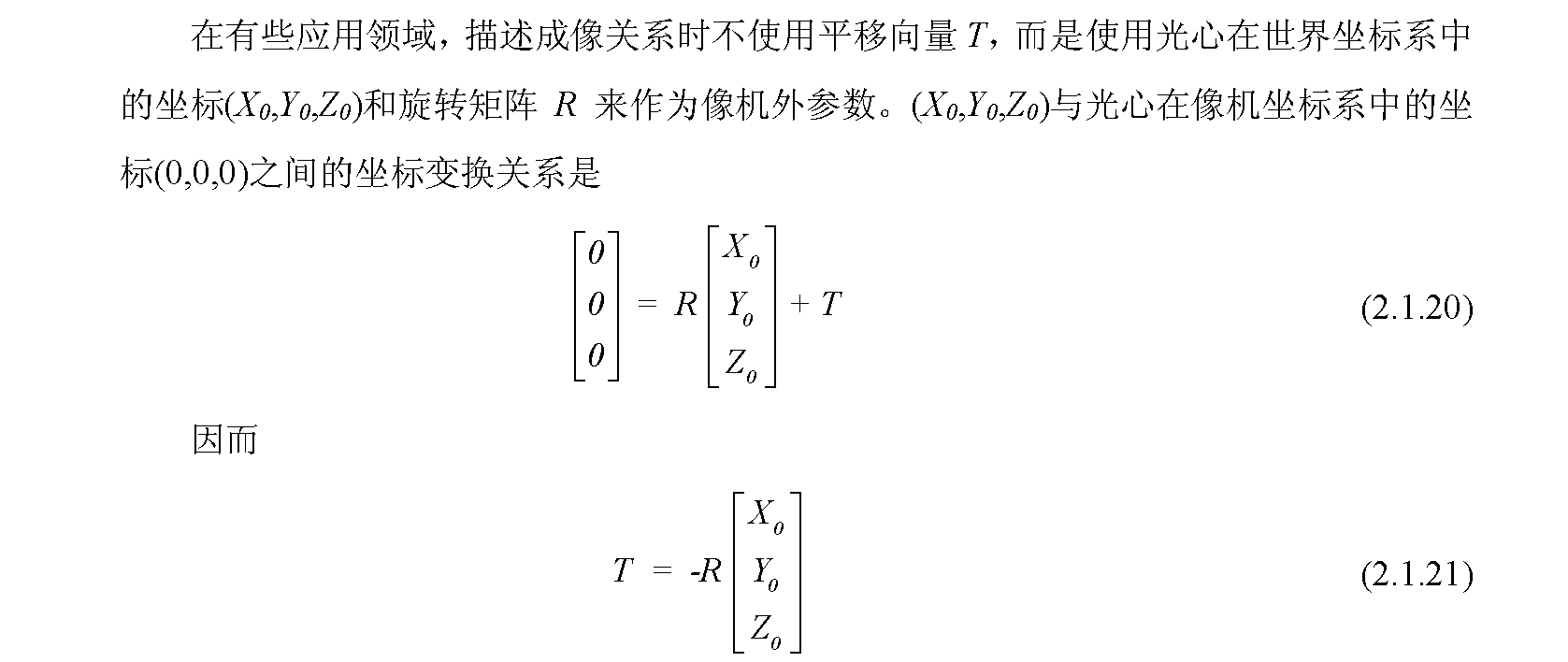
相机坐标系和世界坐标系的变换

而坐标系变换时对于的每个旋转矩阵可以计算如下



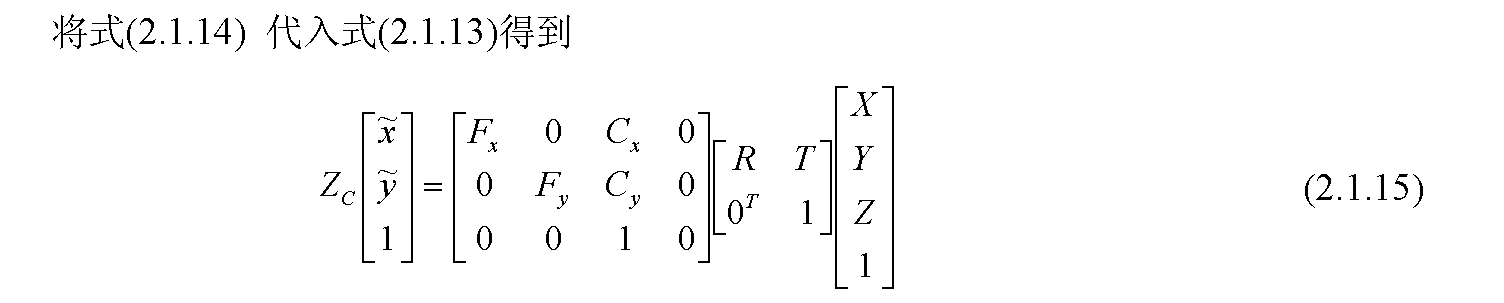
共线方程和透视投影矩阵
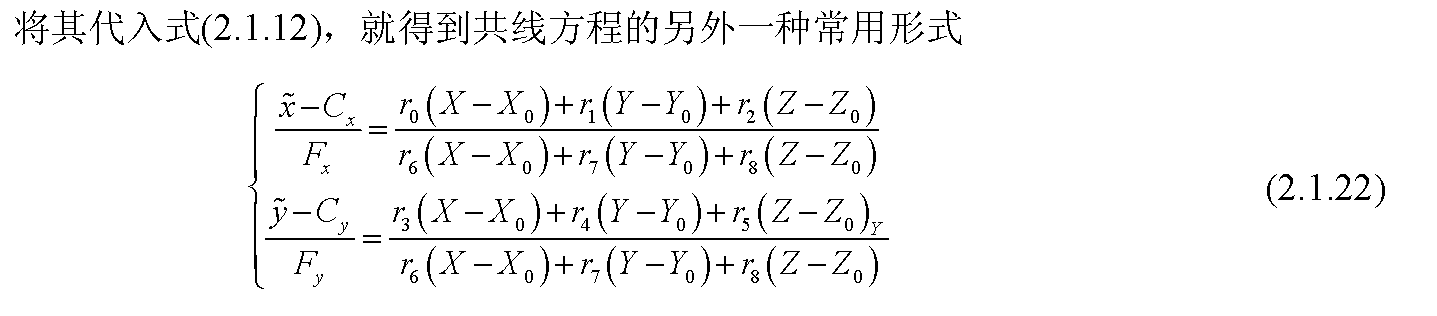
共线方程由上面的公式可知为:

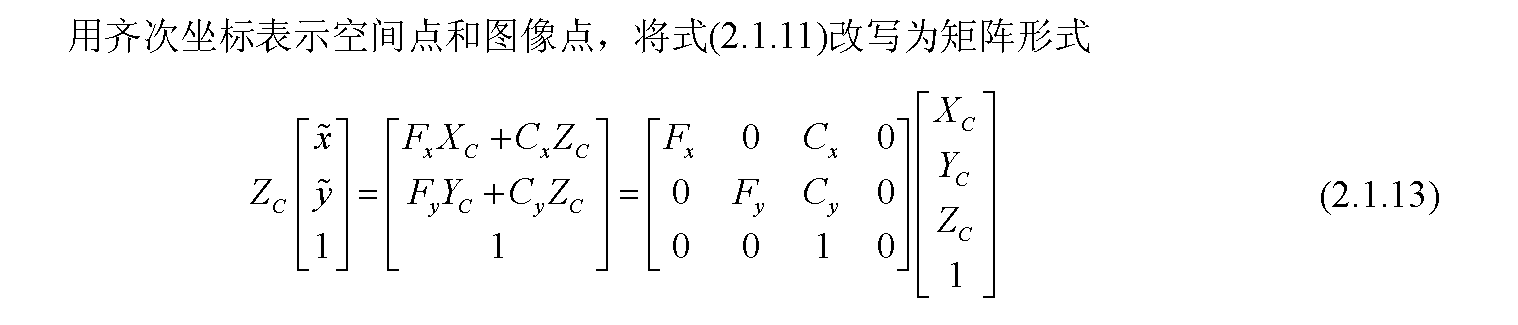

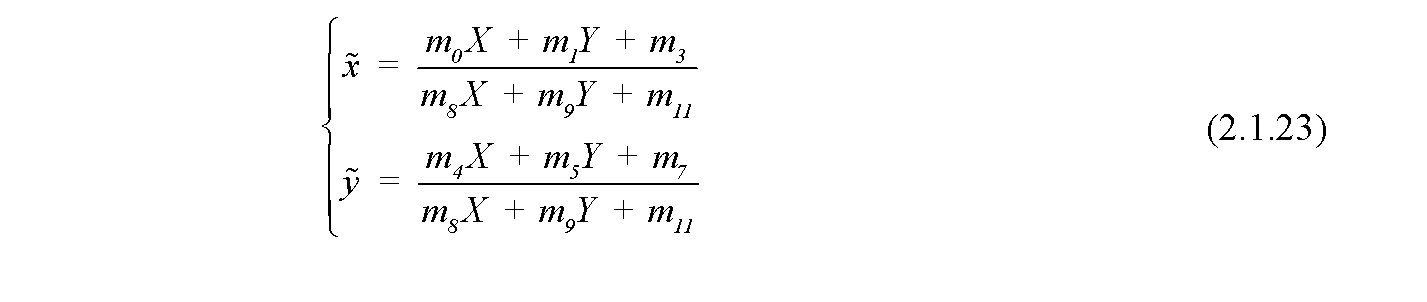
M就是透视投影矩阵,代入各个参数计算可得M的值如下:

所以,以投影矩阵描述的共线方程如下:

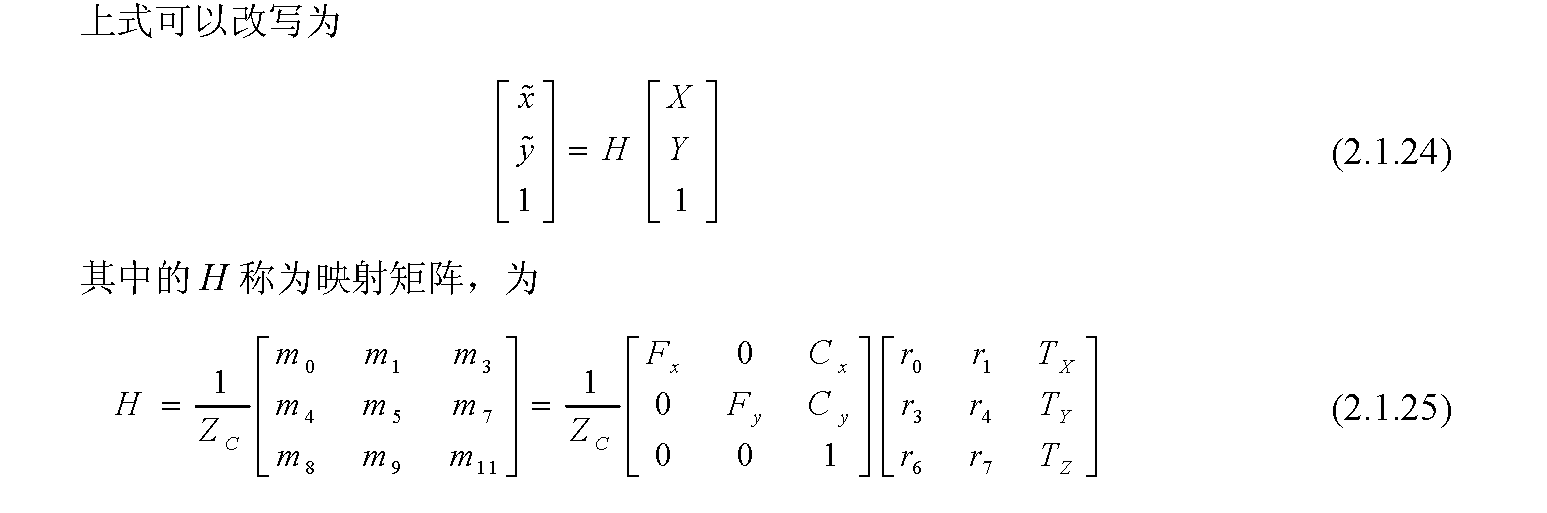
共平面摄像投影
选这个平面为世界坐标,那么投影共线方程中Z坐标为0,所以变为一下形式:
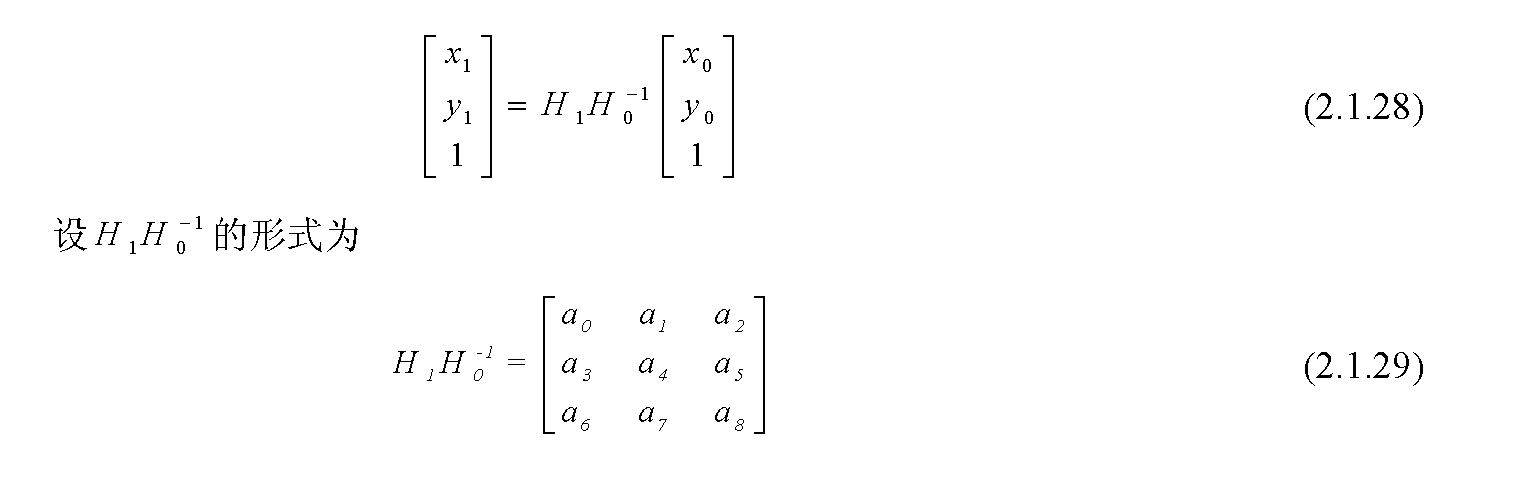
多幅图像间的仿射变换

而坐标系变换时对于的每个旋转矩阵可以计算如下
共线方程由上面的公式可知为:
M就是透视投影矩阵,代入各个参数计算可得M的值如下:
所以,以投影矩阵描述的共线方程如下:
选这个平面为世界坐标,那么投影共线方程中Z坐标为0,所以变为一下形式:
多幅图像间的仿射变换
 3756
3756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言