







我们理论分析的时候,使用小孔成像模型来分析。
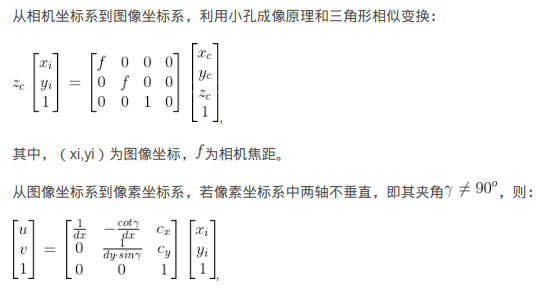
其中,
(
u
,
v
)
(u,v)
(u,v)为像素坐标,
(
c
x
,
c
y
)
(c_x, c_y)
(cx,cy)表示相机主点(principal point),即相机畸变中心,一般在图像中心点附近;
d
x
dx
dx和
d
y
dy
dy是像元尺寸。
例如,
1280
∗
960
1280*960
1280∗960 的分辨率的图像,
(
c
x
,
c
y
)
(c_x, c_y)
(cx,cy)一般在
(
640
,
480
)
(640,480)
(640,480) 附近,若CMOS senosr的尺寸为
64.0
m
m
×
48.0
m
m
64.0mm ×48.0 mm
64.0mm×48.0mm,则:
d
x
=
64.0
m
m
1280
p
x
dx= \frac{64.0 mm}{1280 px}
dx=1280px64.0mm
d
y
=
48.0
m
m
960
p
x
dy=\frac{48.0mm}{960px}
dy=960px48.0mm
英寸:
英寸的符号是"(即英文状态的双引号)或者inch(简写为in)。
1"=1英寸(inch) = 2.54 厘米
1'=1英尺(foot,符号ft) = 12英寸(12") = 30.48 厘米
显示器中常用寸来表示屏幕大小,一般这里的寸都是指英寸,在宣传中也都是用27"(27寸)这种形式表示。
关于电视屏幕尺寸的计算:
一般电视或显示器厂商宣传自家屏幕大小时都是用长度(英寸)而不是面积来表示,例如27寸的显示器,它的显示器面板对角线长即27英寸,换算成厘米就是27*2.54=68.58cm。
镜头光学尺寸:
镜头光学尺寸是指sensor感光面积的大小,一般常见有1/3’’、1/4’’、1/2.7’'等等,其单位为英寸(inch),表述的是sensor感光面对角线的长度。
业界通用的规范就是:
1
英
寸
C
C
D
s
i
z
e
=
长
12.8
m
m
∗
宽
9.6
m
m
=
对
角
线
为
16
m
m
对
应
的
面
积
\color{red}1英寸 CCD size =长12.8mm*宽9.6mm=对角线为16mm 对应的面积
1英寸CCDsize=长12.8mm∗宽9.6mm=对角线为16mm对应的面积
根据勾股定理,得出三边比例为4:3:5。换句话说,我无需给你完整的面积参数,只需给你三角形最长一边(对角线)长度,你就可以透过简单的定理换算回来.
有了固定单位的CCD尺寸,就不难了解CCD size比例的含义了,例如:
- 1/2’’ CCD size的对角线就是1’'的1/2为 16 ∗ 1 / 2 = 8 m m 16*1/2=8mm 16∗1/2=8mm,面积约为1/4;
- 1/4’’ CCD size的对角线就是1’'的1/4为 16 ∗ 1 / 4 = 4 m m 16*1/4=4mm 16∗1/4=4mm,面积约为1/16。
按
照
工
业
标
准
:
1
英
寸
=
25.4
m
m
,
而
在
电
子
元
件
成
像
领
域
S
e
n
s
o
r
尺
寸
:
1
英
寸
=
16
m
m
。
\color{red}按照工业标准:1英寸=25.4mm,而在电子元件成像领域Sensor尺寸:1英寸=16mm。
按照工业标准:1英寸=25.4mm,而在电子元件成像领域Sensor尺寸:1英寸=16mm。
我们平常所说的CCD/CMOS的尺寸,实际上是指Sensor对角线的长度,这一点跟我们平常所说的屏幕尺寸是一样的。
按照最开始CCD应用在摄像机上的标准
12.8
m
m
∗
9.6
m
m
\color{red}12.8mm*9.6mm
12.8mm∗9.6mm 的面积,
12.
8
2
+
9.
6
2
=
1
6
2
\color{red}12.8^2+9.6^2=16^2
12.82+9.62=162,对角线尺寸为16mm,所以Sensor尺寸的1就是指对角线16mm。
9.6
m
m
:
12.8
m
m
=
3
:
4
9.6mm:12.8mm = 3:4
9.6mm:12.8mm=3:4
720
:
1280
=
9
:
16
720:1280 = 9:16
720:1280=9:16
1080
:
1920
=
9
:
16
1080:1920 = 9:16
1080:1920=9:16
那么我们以1/2.5"CMOS来计算下mm单位下的尺寸:
1
/
2.5
"
C
M
O
S
:
(
12.8
/
2.55
)
∗
(
9.6
/
2.55
)
=
5.02
m
m
∗
3.76
m
m
1/2.5"CMOS:(12.8/2.55)*(9.6/2.55)=5.02mm*3.76mm
1/2.5"CMOS:(12.8/2.55)∗(9.6/2.55)=5.02mm∗3.76mm
上面这个是不是写错了,是不是下面这样:
1
/
2.5
"
C
M
O
S
:
(
12.8
/
2.5
)
∗
(
9.6
/
2.5
)
=
5.12
m
m
∗
3.84
m
m
1/2.5"CMOS:(12.8/2.5)*(9.6/2.5)=5.12mm*3.84mm
1/2.5"CMOS:(12.8/2.5)∗(9.6/2.5)=5.12mm∗3.84mm
同理可以计算出其他尺寸的sensor大小。
例如:

2.3M (1928 * 1208) resolution, 3.0um pixel size, 1/2.7 inch image sensor
上面是某款相机的参数,对于1928x1208的分辨率来说,每个像素的长度为3.0um。
传感器感光面对角线长度为
1
2.7
i
n
c
h
\frac{1}{2.7} inch
2.71inch,,那么感光面对角线长度:
- 如果按照工业上实际的换算:1"=0.0254m=25.4mm 来计算,对角线相当于:
1 2.7 i n c h = 0.37 i n c h = 9.4 m m \frac{1}{2.7} inch=0.37inch=9.4mm 2.71inch=0.37inch=9.4mm - 如果按照电子元件成像领域Sensor尺寸:1"=16mm 来换算的话,对角线相当于:
1 2.7 i n c h = 16 m m / 2.7 = 5.9259 m m \frac{1}{2.7} inch=16mm/2.7=5.9259mm 2.71inch=16mm/2.7=5.9259mm
按照像素宽度 3.0um pixel size来计算:
长为:
1928
∗
3
u
m
=
5784
u
m
=
5.784
m
m
1928*3um=5784um=5.784mm
1928∗3um=5784um=5.784mm
宽为:
1208
∗
3
u
m
=
3624
u
m
=
3.642
m
m
1208*3um=3624um=3.642mm
1208∗3um=3624um=3.642mm
按照上面的长宽来计算对角线是
6.8
m
m
\color{red}6.8mm
6.8mm。和上面两种计算方式得到的对角线长度
9.4
m
m
9.4mm
9.4mm和5.9259mm都不一致,那么我猜测给出的1/2.7 inch应该只是个参考值。
zhz:另外,1928x1208的分辨率应该是图像传感器的分辨率,1920*1080是相机厂家设定的分辨率,不同相机厂家可能都使用同一种图像传感器,经过厂家自己处理,会重新设置一个输出分辨率。
zhz:图像传感器的感光面被划分成1928x1208个小方块,每个小方块都是一个像元,像元的宽度为3um。对于本例中图像传感器像元尺寸3.0um,无论是1928x1208还是1920x1080的分辨率,他们每个像素的宽度都是3um,只不过,厂家把图像传感器的周边的一些给裁剪了,分辨率就相对减小了,但是像元尺寸是固定不变的。
相机坐标系:
相机坐标系度量值为米(m),该坐标系下的每个点
(
x
c
,
y
c
,
z
c
)
(x_c,y_c,z_c)
(xc,yc,zc) 表示
x
c
x_c
xc米、
y
c
y_c
yc米和
z
c
z_c
zc米;
相机坐标系与世界坐标系都是三维坐标系,相机坐标系和世界坐标系(例如车辆坐标系)的原点不同,并且需要平移。
图像坐标系:
图像坐标系度量值为米(m),只不过该坐标系下的点被限制在了感光芯片的大小(感光芯片可能只有指甲盖大小,甚至更小),该坐标系点的每个点
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi) 表示
x
i
x_i
xi 米和
y
i
y_i
yi 米;
像素坐标系:
像素坐标系度量值为像素的个数(pixel);
如果像素坐标系的分辨率设为1280*960,那么像素坐标系的每个点
(
x
p
,
y
p
)
(x_p,y_p)
(xp,yp)表示
(
x
i
d
x
,
y
i
d
y
)
(\frac{x_i}{dx},\frac{y_i}{dy})
(dxxi,dyyi),即:
图像坐标系下以m为单位的点
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi)转换到像素坐标系下,变成了以像素为单位的点
(
x
i
d
x
,
y
i
d
y
)
(\frac{x_i}{dx},\frac{y_i}{dy})
(dxxi,dyyi)。















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









