






 本文主要研究了一种料袋码垛机械手臂,包括其整体方案设计、传动方案详细描述、机械臂分析和结构设计。通过PLC编程控制执行机构和驱动系统,利用三维建模展示装配关系。重点关注了传动机制和结构的创新与优化。
本文主要研究了一种料袋码垛机械手臂,包括其整体方案设计、传动方案详细描述、机械臂分析和结构设计。通过PLC编程控制执行机构和驱动系统,利用三维建模展示装配关系。重点关注了传动机制和结构的创新与优化。
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状及其发展趋势 1
1.3 主要研究内容和方法 2
第2章 机器人总体方案设计 3
2.1机器人组成结构 3
2.2机器人整体结构图 4
第3章 机器人传动方案设计 5
3.1小臂处的传动方案和结构设计 5
3.2大臂传动方案 8
3.3腰身传动方案 9
3.4机械手大臂旋转轴的设计 10
第4章 机械臂分析和结构设计 11
第5章 总 结 13
参考文献 14
致 谢 16
1.3 主要研究内容和方法
本文主要通过研究一种料袋码垛机械手机械臂为研究对象,文章主要分成四大部分。
首先对当前机械手的研究现状进行了简单分析统计概要;
第2章主要针对机械手进行整体设计;
第3章针对运动结构的样式进行了详细介绍,进行结构布局设计;
第4章主要针对机械手的主要零部件进行设计以及强度较和关于轴承的选取,轴的结构设计等部分进行了详细阐述。
另外针对码垛机器人主要结构通过SW三维软件进行了三维建模,通过三维效果能够更直观表达各部分的装配关系,以及对零件进行重量计算、受力分析等操作。
第2章 机器人总体方案设计
2.1机器人组成结构
该料袋码垛机械手机械臂通过底座固定在混凝土地面之上,其中底盘能够实现360度旋转,旋转机构主要是通过蜗轮蜗杆减速器实现减速并旋转,该机构能够实现自锁,当电机停止转动后能够实现位置的锁定,无需电机抱闸制动。第二节的旋转作业通过电机驱动一个拉杆实现,拉杆的强度相对较高通过铸铁加工成本较低,经济性较好。第三节通过减速电机驱动齿轮,小齿轮与大齿轮啮合实现旋转。末端的抓取机构主要是通过气缸的伸缩实现抓取,采用气缸能够实现抓手的快速位移,提高工作效率。关于该机械手的机构构成如下图2.1所示。
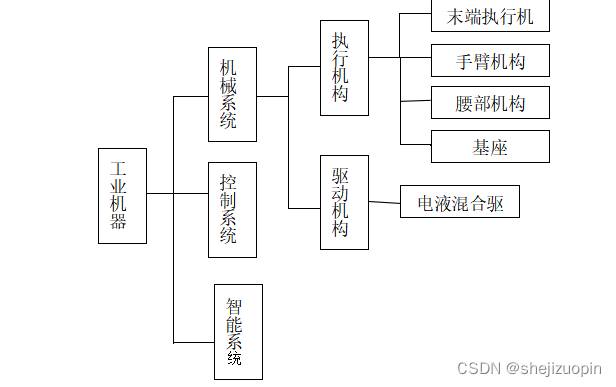
图2.1 机器人组成机构图
机械手的工作需要根据指令进行相应的操作,所谓的指令就是PLC程序。根据动作的需要先对机械手的动作进行PLC编程,之后机械手的每个动作都是根据程序进行动作的。机械手的其机械系统分成执行机构和驱动系统两部分,每次码垛的位置是否准确又通过检测系统进行位置信息反馈给PLC,如果位置信息不准确,系统会报警,需要人工进行排除处理。其中执行机构主要是末端的抓手机构,驱动机构是各个关节的驱动马达等,关于驱动机构除了采用马达的方式之外,也可以采用气缸、液压缸等均可做为动力源。


































 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











