






一、电机控制专用的ASIC算法芯片
电机控制专用的ASIC(Application Specific Integrated Circuit)算法芯片是专为电机控制应用定制设计的集成电路,这种芯片集成了特定的控制算法和硬件电路,能够高效地实现对电机工作状态的精确控制。这类芯片通常会包括以下功能模块:电机驱动控制逻辑:用于实现各种电机控制策略,比如PMSM(永磁同步电机)的FOC(磁场定向控制)、BLDC(无刷直流电机)的三相换向控制等。电流检测与调节:内置或配合外部传感器进行电机绕组电流实时监测,并通过PID或其他高级控制器算法进行闭环控制。位置/速度检测与反馈:集成或接口连接编码器、霍尔传感器等元件,获取电机的位置和速度信息,并基于这些信息做出精确的运动控制决策。保护机制:具备过流、过压、欠压、过温等各种故障检测及保护措施,确保电机在安全范围内运行。通信接口:提供如CAN、UART、SPI、I²C等通信接口,以与其他车载电子系统或上位机进行数据交互和指令接收。功率级驱动:直接与功率半导体器件(如MOSFET、IGBT等)相连,通过优化的栅极驱动电路来快速准确地控制开关动作,从而实现高效率、低噪声和低EMI(电磁干扰)的电机驱动。数字信号处理能力:可能包含DSP(数字信号处理器)单元,用于复杂的算法计算,如预测性控制、自适应控制等。节能和优化算法:根据电机负载变化动态调整控制参数,实现节能运行和优化电机性能。总之,电机控制专用的ASIC算法芯片是一个高度集成化的解决方案,它结合了微电子技术、电力电子技术和自动控制理论,使得电机控制系统具有更高的性能、更小的体积、更低的成本以及更强的可靠性和稳定性。

二、以集成FOC控制算法的ASIC芯片为例
FOC(Field-Oriented Control,磁场定向控制)是一种先进的交流电机控制技术,特别适用于永磁同步电机(PMSM)和无刷直流电机(BLDC)。该技术的核心理念是通过实时监测和控制电机的定子电流矢量方向,使其尽可能与转子磁场(对于永磁电机而言)或者反电动势(对于无刷直流电机而言)保持一致,从而实现对电机转矩的精确控制。
在FOC控制系统中,主要包含以下几个关键步骤:坐标变换:将三相静止坐标系下的电压、电流信号转换为两相旋转坐标系(通常是dq坐标系),其中d轴与磁场或反电动势方向平行,q轴与其垂直。转子位置检测:通常需要霍尔传感器、编码器或其他方式来准确检测转子的位置信息,以便确定d-q坐标系的旋转角度。电流控制:在d-q坐标系下独立控制d轴电流(产生恒定磁场)和q轴电流(产生转矩),确保电流矢量始终按照设定的目标值进行调整。速度/位置闭环控制:根据给定的速度或位置指令,通过PI控制器等调节算法形成闭环控制,保证电机达到并保持期望的运行状态。磁链观测或估算:对于永磁同步电机,可能需要通过算法动态估计转子磁链的大小和方向。零矢量插入:在某些特定时刻(例如,当实际电流接近目标电流时),选择性地插入零矢量,以减小开关频率,降低开关损耗,并改善电机的低速性能。通过上述过程,FOC能够显著提高电机的动态响应、效率、平稳性和噪声水平,在许多高性能应用领域如电动汽车驱动系统、伺服系统、风力发电以及精密工业控制中得到广泛应用。
三、假如你想设计一款电机控制专用的ASIC算法芯片
以下给出算法框架设计与验证过程:
1、搭建一个最简FOC控制框架
2、配合形成最简调试指导说明
3、客户GUI输入电机铭牌参数
4、芯片上电直接驱动电机运行

上图最简FOC模块所需IP如下
Clark变换及其反变换(加接口可共用一个IP)
Park变换及其反变换(加接口可共用一个IP)
PI模块(该IP可复用到电流环PI、速度环PI、锁相环PI、弱磁环PI)
SVPWM(兼容多种PWM调制模式,注意关联采样等特殊处理)
效率优化模块(独立IP,需计算参考或调整角度值)
角度发生器(VF 或 IF 用于基本的调试和开环运行)
磁链或者反电势观测器(独立IP,其乘除法数十个,甚至更少)
OK,你拥有了一款电机控制专用的ASIC算法芯片
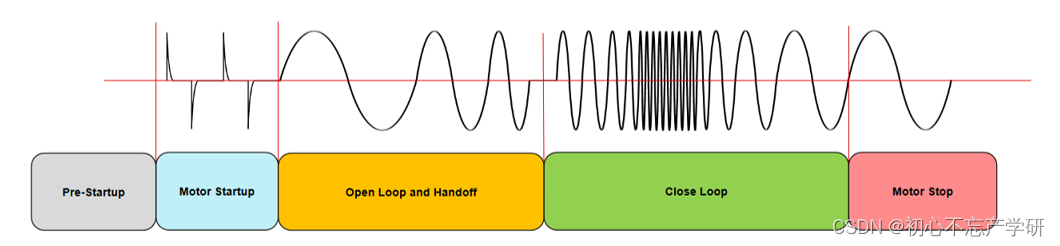
当电机开始转动起来,引用一张德州仪器的图片,其启动顺序如下
四、FOC等电机控制模块解析
之后会有很多博客是对应的模块算法解析,下期再见!
五、补充一下ASIC算法芯片设计实际还有的步骤
设计一款电机控制专用的ASIC(Application Specific Integrated Circuit)算法芯片通常涉及以下关键步骤:
1. 需求分析与规格定义:确定目标应用领域和具体电机类型(如永磁同步电机PMSM、无刷直流电机BLDC等)。明确电机控制功能需求,包括但不限于:速度控制精度、电流控制性能、效率要求、保护机制等。设计芯片需支持的通信接口标准(例如CAN, UART, SPI等),以及外部传感器接口(编码器、霍尔传感器等)。
2. 控制算法研究与优化:研究并选择适合特定电机类型的控制算法,比如磁场定向控制(FOC)、直接转矩控制(DTC)等,并进行仿真验证。对算法进行优化以适应硬件实现的限制,确保算法在满足性能指标的同时具有较低的计算复杂度和较小的存储空间需求。
3. 架构设计与模块划分:根据控制算法的需求,将ASIC划分为不同的功能模块,如电源管理单元、微控制器核心、电流检测与处理模块、驱动逻辑、通信接口、安全与保护模块等。设计每个模块的内部结构和数据流,考虑信号处理的速度、精度和功耗要求。
4. RTL级设计:使用HDL(Hardware Description Language,如Verilog或VHDL)编写各个模块的功能描述,完成RTL(Register Transfer Level)级别的设计。进行模块间的接口定义和协同工作流程的设计。
5. 逻辑综合与验证:将RTL代码输入到逻辑综合工具中,转换为门级网表,优化逻辑资源利用率和时序性能。利用形式验证、仿真验证等手段,确保电路逻辑正确无误,并达到预设的性能指标。
6. 布局布线与物理设计:在物理设计阶段,将逻辑网表映射到实际的晶片上,确定各模块的具体位置及连线方式。运用EDA工具进行布局布线优化,考虑功耗、面积、散热等因素,达到电路的电气性能要求。
7. 前/后仿真与签核:完成物理设计后,进行前仿真的功能验证,以及后仿真的时序验证,确认设计在硅片上的表现符合预期。进行静态时序分析(STA)、电源完整性分析(PI)、信号完整性分析(SI)等,确保芯片能够正常工作且符合制造工艺要求。
8. 测试方案制定与测试向量生成:根据芯片功能制定详尽的测试方案,包括芯片出厂测试(DFT,Design for Testability)策略和系统级功能测试。生成用于验证电路功能正确的测试向量集。
9. 芯片制造与封装:将经过验证的设计提交给半导体制造商,进行光罩制作、晶圆生产、切割、封装等工艺流程。
10. 测试与调试:收到成品芯片后进行实验室测试,验证其在真实环境下的性能,可能需要对电路进行进一步调整优化。
经过最终验证合格后,批量生产并投入市场使用。在整个过程中,团队需密切协作,结合软硬件专业知识,不断迭代优化设计,确保ASIC芯片能高效稳定地执行电机控制任务。同时,还要考虑到芯片成本、可靠性和市场竞争力等方面因素。
















 359
359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











