







TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_Delay(10000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
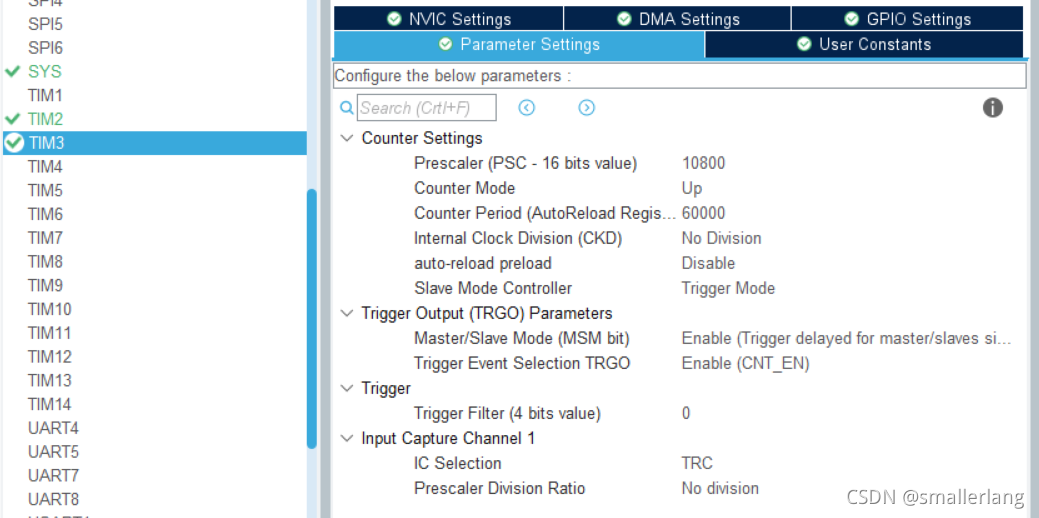
htim2.Init.Prescaler = 10800;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 60000;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_TRIGGER;
sSlaveConfig.InputTrigger = TIM_TS_ITR2;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 10800;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 60000;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_TRIGGER;
sSlaveConfig.InputTrigger = TIM_TS_TI1F_ED;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_ENABLE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_TRC;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
/*Configure GPIO pin : PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
总结:
1、

2、
3、

4、
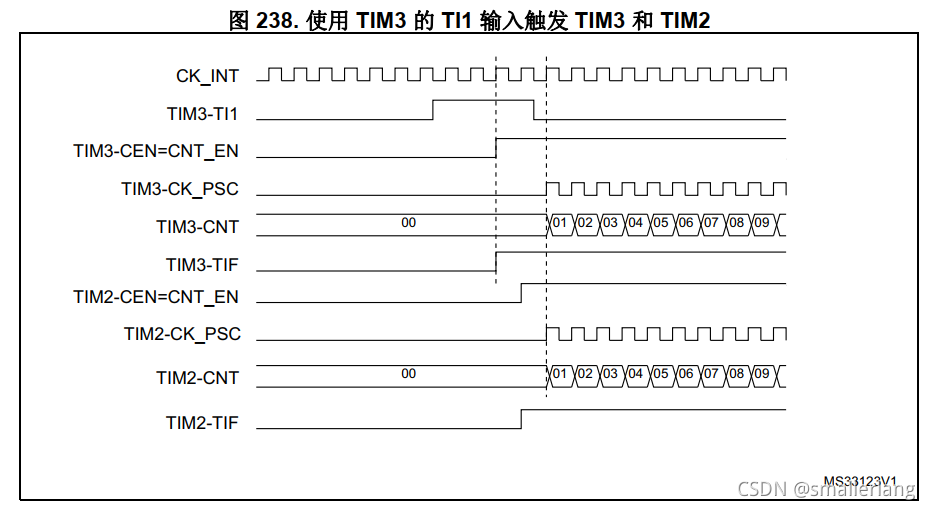
5、将PB1与PA6短接,PB1为GPIO输出,输出上升沿,PA6为TIM3_CH1
6、TIM3并没有在上升沿时才启动,而是程序开始后就启动了
7、TIM2在上升沿后启动















 3586
3586











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









