







1. 概述
TerraSAR的相控阵天线具备方位向和距离向二维电扫能力,在这一能力的基础上,TerraSAR可以工作在条带模式、ScanSAR模式、滑聚模式和TOPS模式(TOPS是实验模式,不是主模式)。载荷的PRF可以设计在3-6.5kHz,大于天线波束宽度对应的2.8kHz的多普勒带宽,那么多余的PRF可以做一些有趣的实验,比如全极化、同步双向接收等。
在同步双向接收模式下,SAR同时采集前后两个不同方向的SAR图像,这种工作模式可以为SAR图像解译与应用提供更多帮助。一方面,这种模式可以提供统一区域长时间基线的影响,比如在TerraSAR参数下,可以获取时间基线为5.8s相同区域的影响,而在双通道模式下,时间基线仅为15ms;另一方面,可以获取相同目标不同角度的后向散射系数,为后续多角度研究的工作提供数据。
2. 几何模型
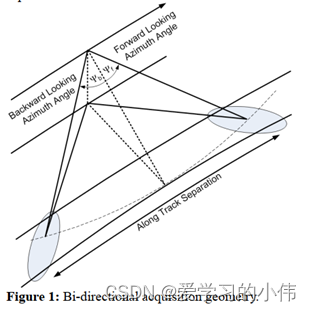
同步双向接收SAR的几何示意图如下图所示,天线波束分别使用a和b沿方位向向前和向后扫描,那么相同的场景会沿着方位向被照射两次。
3. 方位波束锐化赋形
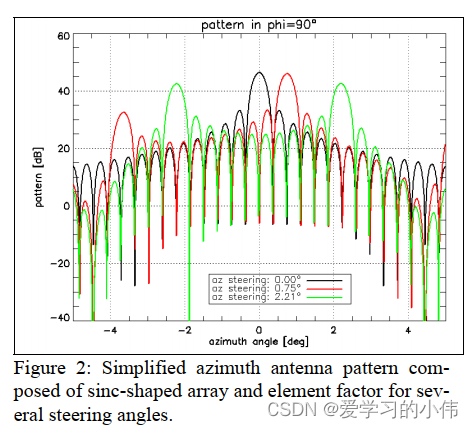
通常,对于相控阵天线而言,可以将天线赋形为两个窄波束,同时照射两个或者更多的区域。然而,对于TerraSAR这个实验而言,不需要特殊做特殊的天线波束锐化赋形,因为当方位向天线扫描角达到2.2°时,天线会出现一个和主瓣强度相似的栅瓣,主瓣和栅瓣就构成了BiDi SAR需要的双波束天线。这种方式足以验证BiDi SAR的工作原理,如果后续专门设计了相应的天线方向图,那么图像质量将明显改善。
图 2 显示了对具有 TerraSAR-X 尺寸的天线进行简化方向图计算得出的方位天线方向图。它显示了几个方位角转向角的方向图,即主瓣转向 0°、0.75° 和 2.21°。
4. 时序(PRF)设计
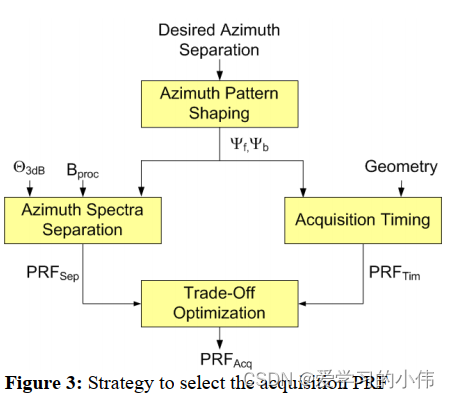
下图给出了计算关键时序参数(即PRF)的主要方法。首先根据成像场景设计波束分裂后的天线方向图,得到前向和后向方位扫描角f和b。如果这个角度可以通过天线系统来实现,那么接下来就是计算方位谱的分离。
在允许的方位模糊比的约束下,根据瞬时3dB方位带宽计算方位谱分离。为了抑制方位模糊,可以适当减小方位处理带宽。方位谱分离的计算结果就是实现设计模糊度所需要的的PRFSep.
根据采集几何计算采集时序参数。 原则上,向前和向后看的角度不需要是对称的。 然而,来自两个方向的回波的到达时间应该在一个脉冲重复间隔内重叠。 结果是一组可能的 PRFTim 值,这些值足以避免天底干扰和传输干扰。 最后,PRFSep 和 PRFTim 之间的权衡会导致 PRF 用于采集 PRFAcq。
根据数据获取的几何关系,可以计算时序参数。原则上,方位波束前向扫描角和后向扫描角可以设计成不对称的。但是来自两个方向的回波信号的到达时间,应该在一个脉冲重复间隔内。根据这一要求可以设计一组可能的PRFTim值,这些值足以避免星下点干扰和传输干扰。最后,在PRFSep和PRFTim之间进行折中,得到产生实际获取数据的PRF,即PRFAcq.
5. 图像获取示例
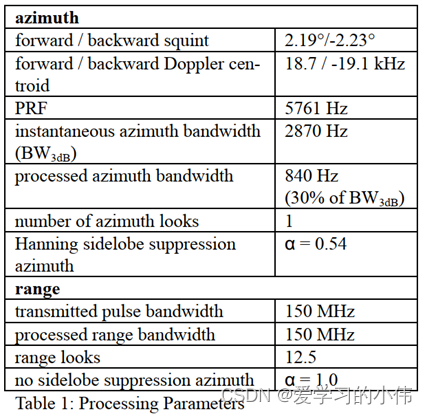
下图给出了2009年7月获取的挪威地区的前视和后视数据,工作模式是条带模式,照射区域是挪威西海岸的一个峡湾的地区。TABLE1给出了数据的部分成像参数,其中,前向波束和后向波束相差了4.2°,多普勒中心分别为18.7 和 -19.1 kHz。

原始数据方位频谱的幅度谱如Figure4所示,从频谱的轮廓形状中可以识别出两个最大值,他们分别对应前向波束和后向波束的多普勒中心。为了抑制前视图像和后视图像的方位模糊,方位向处理带宽设置为3dB带宽的30%,此时的单视方位分辨率为11m。
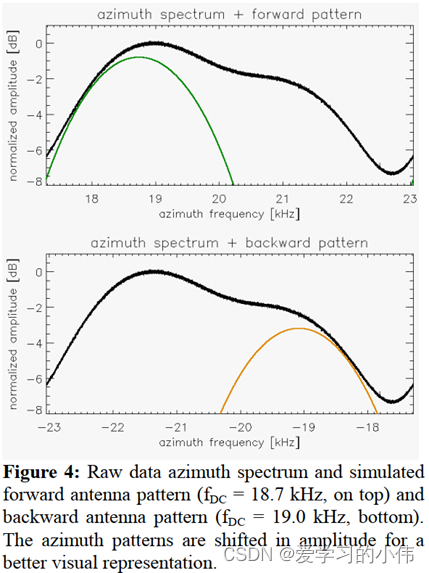
从天线方向图的计算结果来看,天线的主瓣和栅瓣的增益几乎相等;但是从回波信号幅度谱来看,两个天线波束对应数据的能量差异较大。导致这一差异的原因,可是是照射区域的后向散射差异,因为他们相距41.4km,前视图像较亮场景对应的数据和后向图像较暗场景对应的数据,都对信号频谱产生了影响。下图给出了成像场景的部分参数。
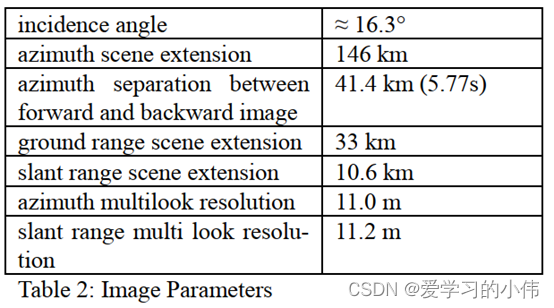
肉眼第一印象,没有发现前后视图像的方位模糊,但是两幅图像中还存在一些明显的差异,比如图中缩放区域出现了明显的波浪图案。图像中水域的反射率比较强,主要是引入入射角比较小,仅为16°。
6. 小结
结合TerraSAR-X系统的参数,实际上有多重重复照射相同场景的方案,且保证两次照射的时间间隔在几秒范围内:
- 前视条带和后视条带分别照射相同的区域;
- 在具有双倍PRF的条带模式下,切换前视波束和后视波束;
- 前视和后视同时获取数据,也即同步BiDi模式。
其中,
- 方案2仅使用与TSX的标准方位转向角范围,即 ±0.75°,因为更高的转向角,栅瓣的影响将不可忽略。因为PRF是在两个虚拟通道之间划分的,因此不能像方案3那样摆脱栅瓣的影响。
- 方案1中,如果合理设计高PRF值来抑制栅瓣,则允许方位扫描角大于标称值;
- 方案2和方案3非常相似,但是方案2不适用栅瓣获取的数据,且图像可能出现非连续条带。
综上,TerraSAR-X成功获取了同步BiDi模式图像,在PRF远高于瞬时多普勒带宽的系统中,可以充分利用天线栅瓣获取的数据,来实现前视和后视的同步照射。除了常规的时序限制,即星下点限制和传输限制,设计PRF时还需要考虑两幅图像的频谱分离。通过频谱分离,即可获取时间滞后几秒的两幅同场景图像。
总之,使用 TerraSAR-X 提出并演示了一种新的双向 SAR 采集模式。 与瞬时带宽相比,在具有高 PRF 的系统中,可以扩展由栅瓣施加的前向或后向方位角转向角的限制。 除了通常的时间限制,即传输和最低点干扰,在计算采集 PRF 时,需要考虑两个图像的足够光谱分离。 通过利用光谱分离,可以同时获取两个图像,时间滞后在几秒的范围内。
参考文献:Simultaneous_Bi-directional_SAR_Acquisition_with_TerraSAR-X
本博客上传的所有原创类资料,仅可用于个人学习、交流等非商业性用途。未经作者同意,不可用于任何商业用途。
如在文献、报告等文字材料中引用本博客发布的原创类资料,请注明出处。















 714
714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











