







(文章编号:CSDN_0001_20220904)
目录
1. 概述
Sentinel-1工作在C波段,能以高分辨率对全球陆地、海岸线和欧洲重要航线进行高分辨率成像,并定期覆盖全球海洋。Sentinel-1针对陆地场景有一种主要工作模式,针对开阔海域也有一种主要工作模式,这两种模式可以通过预编程实现无冲突操作。该星的主要工作模式的幅宽为250km,且定位精度和辐射分辨率较高,可以满足大多数应用的需求。
Sentinel-1有四种主要工作模式:
- 标准条带(StripMap, SM):经典条带模式;
- 干涉宽幅 (Interferometric Wide, IW) :TOPS模式,3子带,是 SENTINEL-1 在照射陆地时的主要工作模式。
- 超宽幅 (Extra Wide, EW): TOPS模式,5子带。 与IW模式相对,EW 模式以牺牲空间分辨率为代价增大了测绘带宽,是照射海洋场景时的主要工作模式。
- 波模式(Wave, WV) :在条带模式沿着轨道,交替获取若干个小片段。WV 是 SENTINEL-1 照射远海的主要运行模式。
ESA 分发的 SENTINEL-1 数据产品包括:
- 原始 Level-0 数据(用于特定用途);
- SLC图像(系统分发仅限于特定相关区域);
- 地距投影的L1级多视图像(Ground Range Detected, GRD),系统分发;
- 级海洋 (Ocean,OCN) 数据,用于检索的海洋地球物理参数,系统分发;
1.1 地球物理测量
与需要外部光源照射的无源光学传感器不用,SAR可以以一定的角度向地球自主发射电磁波,并接收地面返回的回波信号。对接收到的信号进行成像处理操作,即可获取信号的亮度幅值和相位信息,以构建场景图像。
SAR可以根据后向散射测量形结构和表面粗糙度。通常地面越粗糙、结构越多,发射的能量越多,在SAR图像上呈现为明亮的部分;平坦的路径主要发生镜面反射,将雷达信息反射到别的方向,在SAR图像上呈现为较暗的部分;结构复杂的目标(例如森林)会更亮,因为树叶、树枝和树干的信号会相互作用,进而导致更多的能量被反射会传感器。
物体材料的介电常数也会影响SAR图像的特征,介电常数反映材料的反射率和导电率。大多数天然材料在干燥时的介电常数在3到8之间,而水的介电常数为80,因此植被和土壤中水分的存在,会明显改变SAR图像的反射特性。
上述特性使得SAR非常适合地质和地貌、土壤水分、土地覆盖、海洋学和海洋等领域的应用,特别是关于 SAR 极化和干涉特性的应用。
1.2 极化
Sentinel-1 是一种保相双极化 SAR 系统,它可以以水平 (H) 或垂直 (V) 极化发射信号,然后以 H 和 V 极化同时接收。双极化 Level-1 单视复 (SLC) 产品包含复数值,除了可以从每个单极化图像中获取后向散射强度外,多极化通道间的相位信息还可以对后向散射特性进行一些增强分析。
地面目标具有独特的偏振特性,目标在SAR图像上的不同强度,反映了不同的偏振(或将一种偏振转换成另一种偏振)特性。例如,体散射目标(如森林树冠)和面散射目标(如海面)具有不用的偏振也行。使用极化技术,如极化分解,可以分离不同计划的贡献,并提取散射过程相关的信息。
1.3 干涉
2. 产品级别和产品类型
Sentinel-1的SM、IW和EW模式的数据由PDGS自动生成,包含3个产品级别:
- Level-0
- Level-1
- Level-2
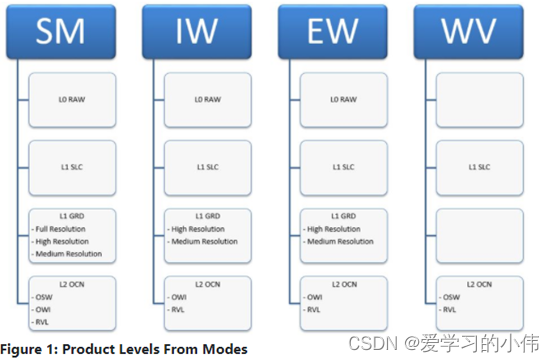
Level-1产品包含两种数据类型:单视复图产品(SLC)和地距投影产品(GRD)。Level-2 OCN产品包含的产品文件会随着观测模式变化。产品是由观测模式、产品类型和L1地距投影产品的分辨率来指定的。所有的产品都是在L0产品的基础上生产而来的。除WV模式外,每一种模式都可以生产L1 SLC、L1 GRD和L2 OCN产品,如下图所示。
2.1 Level-0
Level-0指的是被压缩过的成像聚焦前的回波数据,是生产其他高级产品的数据源。Level-0 数据使用灵活动态块自适应量化 (FDBAQ) 算法进行压缩,使用可变比特率进行编码,对强散射目标分配更多的比特数。为了使数据可用,必须使用成像处理软件对齐进行解压缩和成像处理。
0级数据包含了噪声、内定标数据、雷达回波数据和卫星姿轨信息。地面系统对0级数据进行长期存储,保证在卫星生命周期内和退役后的25年内,随时加工成任意类型的产品。仅SM、IW 和 EW 模式下,用户可以获得0级数据。
2.2 Level-1
L1聚焦数据是面向绝大多数用户的产品类型,是地面IPF系统使用各种处理算法在L0产品的基础上获得的。这些 Level-1 产品构成了 Level-2 产品的基准产品。
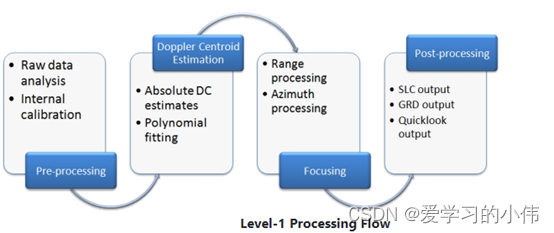
L1产品生产涉及的处理步骤包括预处理、多普勒中心估计、单视复图像聚焦和构造SLC/GRD产品需要的处理插件。处理过程如下图所示。
为了对SLC产品进行辐射校正,即将像素亮度值校正为后向散射,需要的所有参数均可在产品中找到。定标矢量作为注释文件包含早产品中,可以将图像强度值简单地转换为sigma或gamma辐射类型的产品,相关过程可参考文档“Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF”。
1级产品可以被处理成单视复图像SLC和地距投影图像GRD。其中SLC产品保留的相位信息,并以标准采样像素进行处理;GRD产品仅包含幅度信息,且经过多视处理,以减小相干斑的影响。
2.1.1 SLC
Level-1 Single Look Complex (SLC) 产品包括聚焦的 SAR 数据和卫星的姿轨数据,且图像最终聚焦在斜距平面上。 SLC产品使用完整的信号带宽进行成像,没有在方位向或距离向上进行多视处理,且一复数的形式存储图像数据,保留了图像的相位信息。图像使用卫星姿轨数据进行地理参考,且进行了方位向收发延迟校正、距离向天线方向图校正和距离衰减校正。
SM模式的SLC产品,每个极化方式都对应一幅图像;IW模式的SLC产品包含了3个子带,因此单极化模式下有3幅图像,双极化模式下有6幅图像;EW模式的SLC产品包含了5个子带,因此单极化模式下有5幅图像,双极化模式下有10幅图像。
对于IW和EW模式,每个子带包含了一系列的burst,这些burst按照方位时间进行了拼接,如果有数据缺失,则用黑色条带补充。在IW模式下,每个burst的持续时间约为2.75s,相邻burst之间的时间重叠度约为0.4s;在EW模式下,每个burst的持续时间约为3.19s,相邻burst之间的时间重叠度约为0.1s。子带间的重叠度略有增加。这种重叠区足以保证对地面的连续覆盖。
IW和EW产品的每个burst都经过了重采样,使每个采样单元的物理尺寸都相等,以保证后续进行的干涉相关的处理。
SLC 产品中的 Swath Timing记录包含每个burst的信息,包括可用于将这些burst合并在一起的维度、时间和位置。
2.1.2 GRD
GRD产品包含了聚焦的SAR图像,且图像进行了多视处理,并投影到WGS84坐标下的地距平面上。进行椭球投影校正时使用的地形高程在产品元文件中可以找到,这些高程沿方位向变化,但是不沿距离变化;IW和EW模式下,不同子带的高程也是不同的。
IW和EW模式下,每个burst的多视处理是分开进行的,然后将所有的burst拼接称为一个连续的图像。
2.2 Level-2
L2产品是在L1产品的基础上生产的,包含地理信息。用于风、浪、洋流等应用的L2 OCN产品可能包含了下面的地球物理信息:
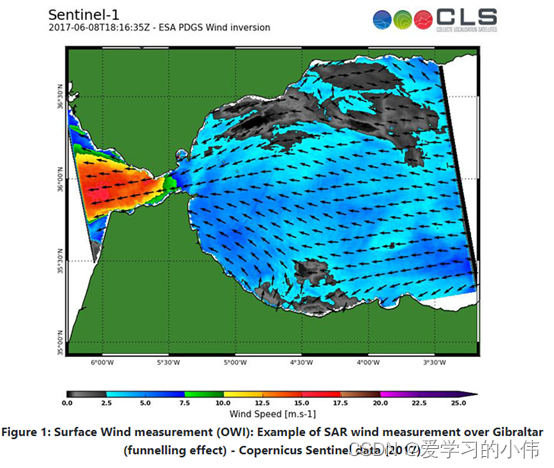
- 海面风场(Ocean Wind Field, OWI);
- 海浪谱(Ocean Swell Spectra, OSW);
- 海表面速度(Surface Radial Velocity, RVL)
能都获得上述信息,还取决于观测模式和产品类别:OWI数据来自GRD产品;RVL和OSW数据(对于SM模式和WV模式)来自SLC产品。
OWI 信息是地面以上 10 m 处的地面风速和风向,源自 SM、IW 或 EW 模式。
OSW 是二维海浪谱,包括对每个谱的风速和风向的估计。 OSW提供了 C 波段 SAR 海浪谱的连续性测量。OSW 仅由SM 和 WV模式生成,在 IW 和 EW 模式中不可用。 对于 SM 模式,一幅SLC图像可以得到多个海浪谱; 对于 WV 模式,每幅图像只有一个海浪谱。

RVL 表面径向速度分量描述了多普勒中心的计算值和估计值,在斜距平面上划分网格。RVL是ASAR多普勒网格产品的延续。
3. 产品文件
以下载的数据IW SLC产品文件,说明Sentinel-1的产品文件。
3.1 组织结构
产品文件夹下包含4个文件夹和两个文件,如下图所示。

3.1.1 Annotation
注释文件,XML格式,如下图所示。

3.1.1.1 产品元文件
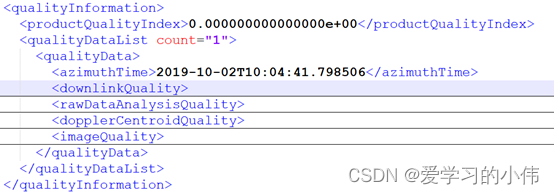
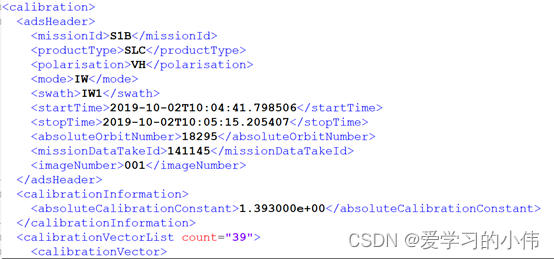
上述路径中的6个xml文件,描述了3个子带、两个极化数据的详细信息,可以理解为GF3的产品元文件,但是其中的信息非常丰富,如下图所示,主要包括数据头信息、质量评价信息等。

数据头信息:描述任务编号、成像模式、产品类型、成像时间等数据基本信息。
质量评价信息:描述产品对应数据的质量信息,包括原始下传数据、回波数据、图像数据和多普勒中心等。
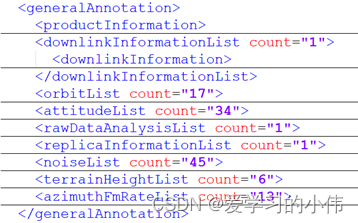
常规注释信息:描述下传数据、卫星轨道(XYZ格式)、卫星姿态、回波数据统计、噪声、地形、方位调频率等信息
图像注释信息:描述图像产品的部分参数和成像处理的控制参数
多普勒中心信息:将图像沿方位向分成若干块,给出每一块数据的多普中心和时间参数。
天线方向图信息:将图像沿方位向分成若干块,给出每一块数据的天线方向图。
子带时间信息:描述子带内所有burst的时间信息。
地理网格信息:将整幅图像二维分成若干个网格,并描述每个网格的经纬度、高程、下视角、入射角等信息、
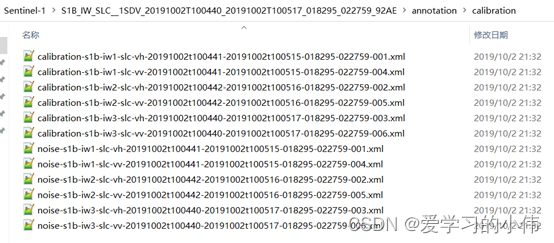
3.1.1.2 定标文件
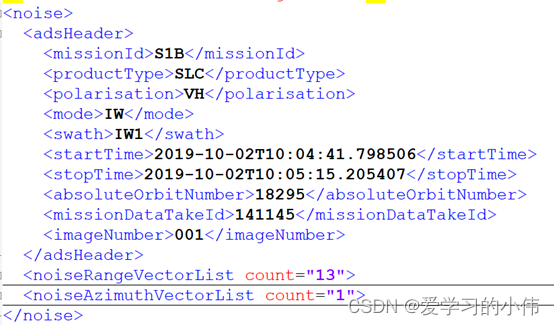
定标文件包含了calibration*.xml和noise*.xml文件,每个子带、每个极化方式各对应一个xml文件,如下图所示。
calibration*.xml文件如下图所示,将整幅图像分成若干块,文件给出了每一块数据像素值、sigma、beta、gamma产品之间的关系。如何使用需要进一步查阅使用说明。
noise*.xml文件如下图所示,将整幅图像分成若干块,文件给出了每一块数据噪声相关的参数。如何使用需要进一步查阅使用说明。
3.1.2 measurement
图像文件,每个子带、每个极化方式,对应一个tiff文件。
3.1.3 Preview
产品预览。

Icon文件夹下有ESA的logo,如下图所示。

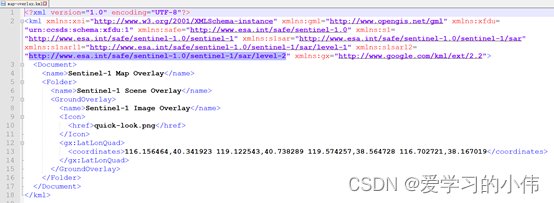
map-overlay.kml文件描述了场景的四角点经纬度,如下图所示。
product-preview.html文件可以预览本产品的所有文件,以及图像产品的缩略图,如下图所示。

quick-look.png为伪彩色浏览图,如下图所示。
3.1.4 support
使用产品文件的支持与说明,详细文件如下图所示。

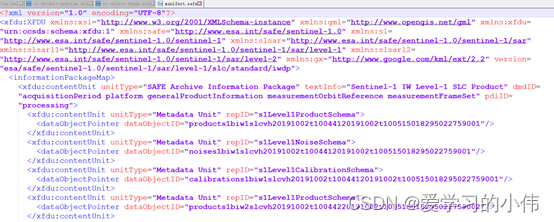
manifest.safe
描述的信息如下,使用方法未知。
本博客上传的所有原创类资料,仅可用于个人学习、交流等非商业性用途。未经作者同意,不可用于任何商业用途。
如在文献、报告等文字材料中引用本博客发布的原创类资料,请注明出处。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











