






 文章详细介绍了两相混合式步进电机的工作原理,特别是细分驱动的概念,包括两倍细分和三倍细分的示例。电压细分和电流细分作为常见的控制策略,各有优缺点:电压细分因反电动势等因素影响精度,而电流细分则受限于电机的最大电流能力。Simulink模型展示了不同控制方式在不同频率和细分程度下的运行效果,电流控制在某些情况下表现更优。
文章详细介绍了两相混合式步进电机的工作原理,特别是细分驱动的概念,包括两倍细分和三倍细分的示例。电压细分和电流细分作为常见的控制策略,各有优缺点:电压细分因反电动势等因素影响精度,而电流细分则受限于电机的最大电流能力。Simulink模型展示了不同控制方式在不同频率和细分程度下的运行效果,电流控制在某些情况下表现更优。
两相混合式步进电机的最简单模型和驱动方式
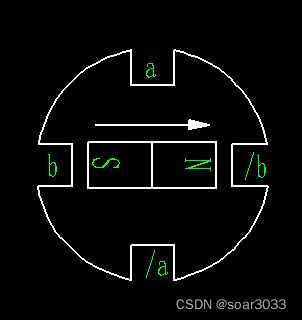
两相混合式步进电机有四个连接点,分别为a+、a-、b+、b-。a+和a-连接绕组A的两端,b+和b-连接绕组B的两端。电机的结构可以简化为如下的图示结构,电机转子可以看成一个磁铁,电机的定子上标有a、b、/a、/b,其中a和/a同为绕组A。
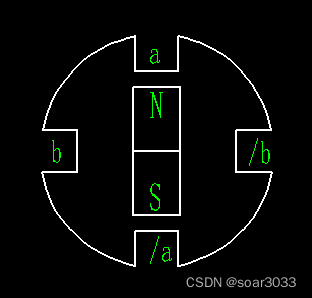
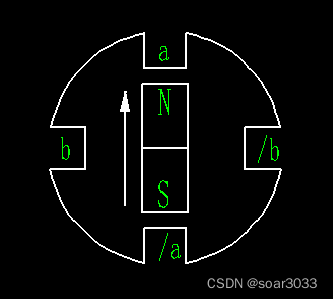
当线a+接电源正极,线a-接电源负极时,磁场方向由/a指向a,此时磁铁(转子)N极朝向a,S极朝向/a(如下图);
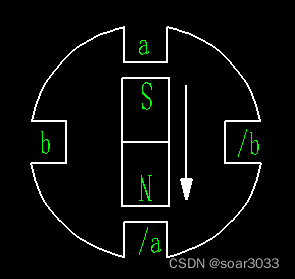
当线a-接电源正极,线a+接电源负极时,磁场方向由a指向/a,此时磁铁(转子)N极朝向/a,S极朝向a(如下图);
相似的,b+和b-分别接电源正极、负极时,磁场方向由b指向/b,此时磁铁(转子)N极朝向b,S极朝向/b(如下图);
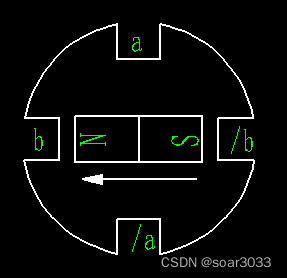
b+和b-分别接电源负极、正极时,磁场方向由/b指向b,此时磁铁(转子)N极朝向/b,S极朝向b(如下图)。
细分驱动
用这样的方式,可以实现以4步的方式运行步进电机,每一次电机运行一个步距角。然而在实际控制中电机的步距角减小往往有利于我们提高控制精度。如果我们让一步所转过的角度成为电机自身步距角的1/n,那么在控制上就可以更加精细,这个方法即为步进电机的细分。下面以2倍细分和3倍细分举例。
两倍细分
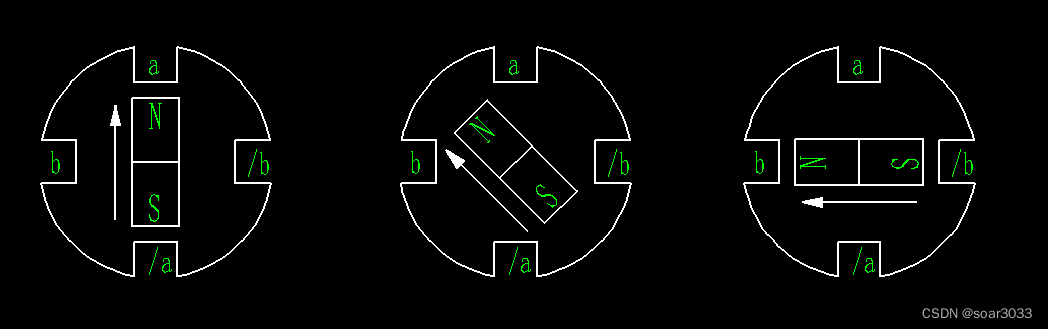
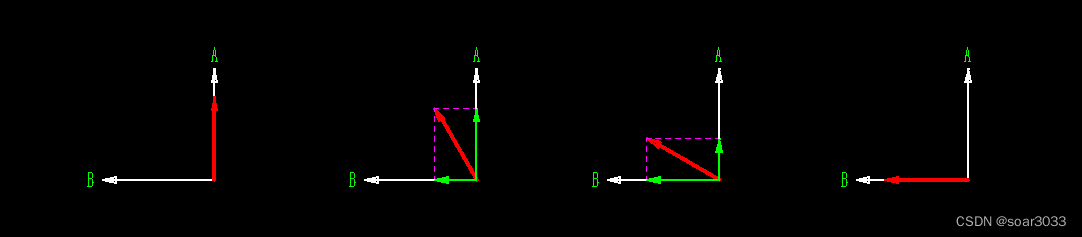
在两倍细分的情况下,假设初始状态磁场方向由/a指向a。当走一步时,磁场的方向并不是变成由/b指向b,而是变成由/a和/b之间的方向指向a和b之间的方向。此时a+和b+接电源正极,a-和b-接电源负极,绕组A产生由/a指向a的磁场,即垂直向上,绕组B产生由/b指向b的磁场,即水平向左,两个绕组合成的磁场方向为上偏左45°。由下图可以看出,以前磁铁(转子)从垂直方向转为水平方向需要一步,而现在需要两步。由此在不改变电机结构的情况下,实现了实际步距角的变为原本的1/2。
三倍细分
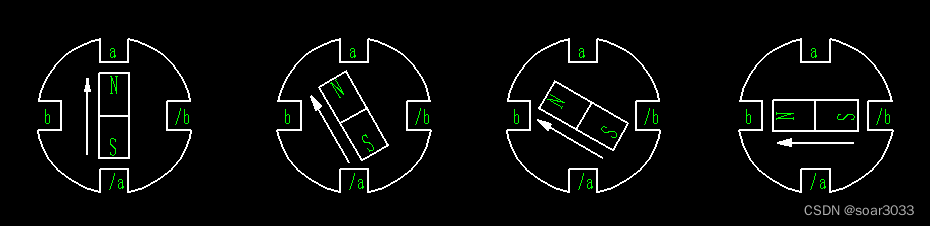
在三倍细分的情况下,假设初始状态磁场方向由/a指向a。当走一步时,磁场的方向变为上偏左30°方向。此时a+和b+接电源正极,a-和b-接电源负极,绕组A产生由/a指向a的磁场,即垂直向上,绕组B产生由/b指向b的磁场,即水平向左。A绕组施加的电压(电流)与B绕组施加电压(电流)的比值=cos(30°)/sin(30°),由此实现两个绕组合成的磁场方向为上偏左30°)。当走第二、三……步时,转子以相似的方式被控制继续转动30°,
由下图可以看出,以前磁铁(转子)从垂直方向转为水平方向需要一步,而现在需要三步。由此在不改变电机结构的情况下,实现了实际步距角变为原本的1/3。
细分的实质
由上面两倍细分和三倍细分的例子不难看出,所谓的细分的实质就是将A、B绕组的电压(电流)按特定比例进行调制,从而获得不同的磁场角度,从而让转子的实际最小转角可以超远电机固有的步距角。
正如下图所示,我们如果想获得一个图示方向的磁场,只需要让A绕组的磁场向上,同时B绕组的磁场向左,同时保证两者磁场的强度比值为cos(a)/sin(a)。
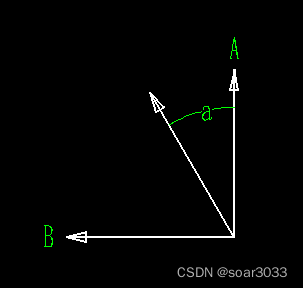
下图以向量合成的方式展示了AB绕组的磁场合成目标磁场,图示展示的细分为三倍细分。
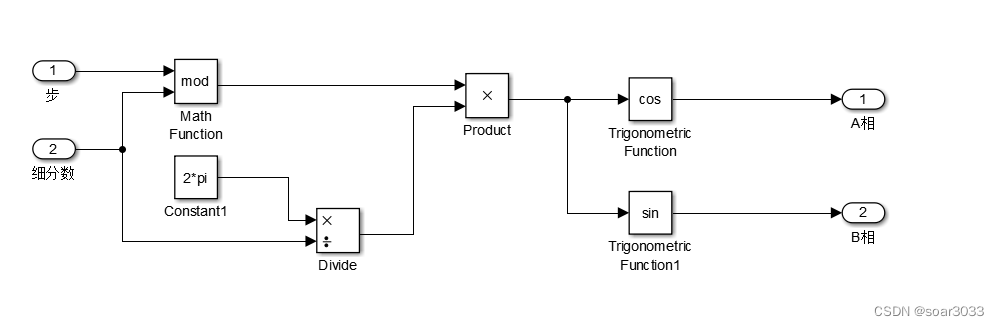
在Simulink里,我们可以通过下面的构造实现细分(信号“细分数”=实际细分倍数*4)。由此可以将驱动器收到的脉冲转化为对应的AB绕组电压(电流)。
电压细分和电流细分
在上面我们在讲解通过AB绕组的磁场合成目标磁场时,总是提到将A、B绕组的电压(电流)按特定比例进行调制。实际在进行细分的时候,有两种控制策略:1通过控制电压进行细分;2通过控制电流进行细分。
两种策略各自有自己的局限性,下面我们来阐述两种策略所存在的问题。
电压细分的问题
首先,我们应当认识到,产生磁场的并不是电压,产生磁场的是线圈中通过的电流。在不考虑磁饱和、漏磁等因素的情况下,AB绕组各自的磁场强度比值等于AB绕组各自电流的比值。由此决定了通过电压进行细分是一种“间接”控制。
由于转动时转子磁场切割定子线圈产生的反电动势,以及其它的一些因素影响,AB绕组的电流比值并不等于AB绕组的电压比值。
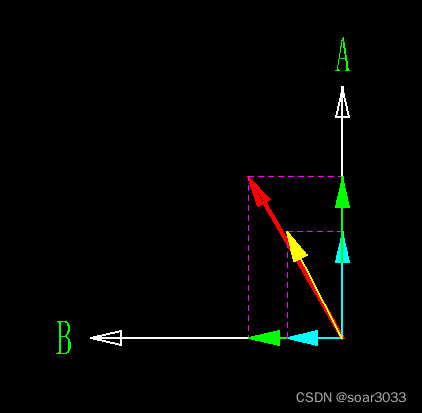
下图绿色向量是AB绕组的电压向量,红色为电压合成向量,蓝绿色为电流(磁场)向量,黄色为电流(磁场)合成向量。我们在通过电压进行控制时是期望磁场合成向量的方向沿电压合成向量方向的。但由于AB绕组电流比值并不完全等于其电压比值,导致实际磁场合成向量(黄色)与目标方向(红色)存在角度偏差。显然,这个偏差的存在,对电压细分方式的静态精度会产生不利影响。
电流细分的问题
考虑到电压细分方式的缺点,我们很自然的想到如果直接以电流为目标值进行调制,不就能够解决电压方式的缺点了吗。
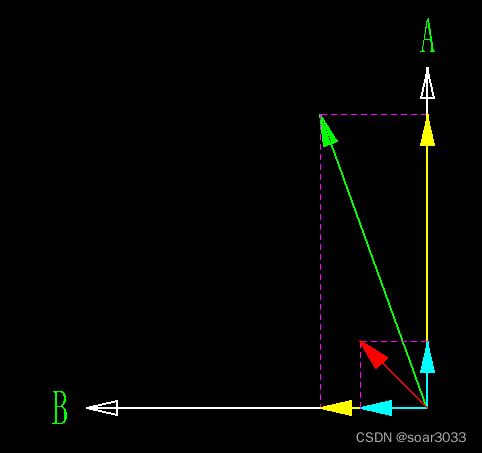
在一些场合下的确是这样,但如果步进驱动器设置的最大电流值超过了电机运行时能够达到的最大电流值(比如一台电机静态最大电流为10A,然后我们将不仅驱动器设置为了6A。然而在高速旋转的时候电机的最大电流可能只能达到2A)。那么这时很有可能导致AB绕组的电流都处在饱和的状态下(当时状态下能达到的最大电流,例如上面例子的2A)。当出现这种状况时,以下图为例,本来目标向量为绿色向量,但实际的合成向量为红色向量,显然实际向量的方向与目标向量方向有了非常大的偏差。
两种方式的运行对比
为了对比两种控制方式的效果搭建了如下的Simulink控制模型
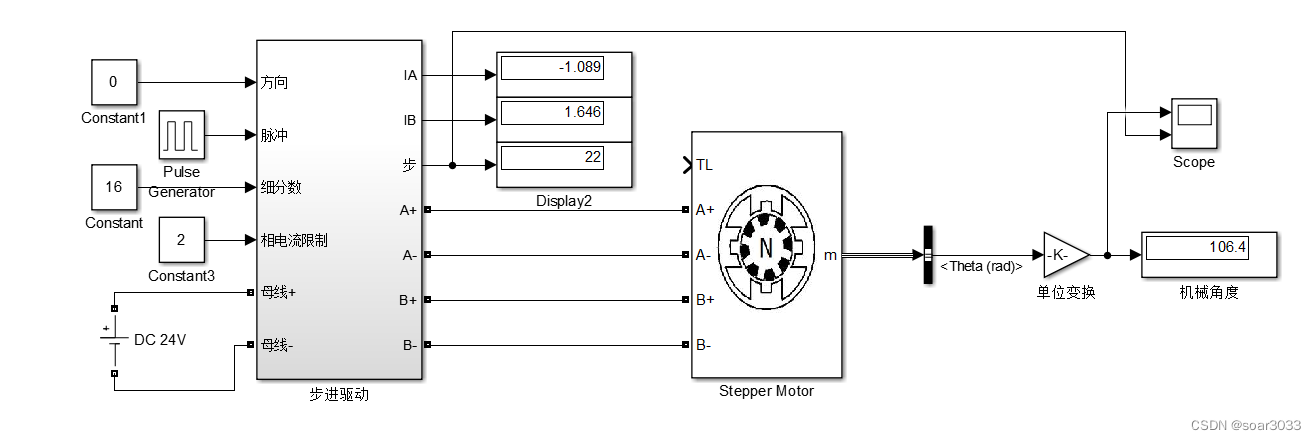
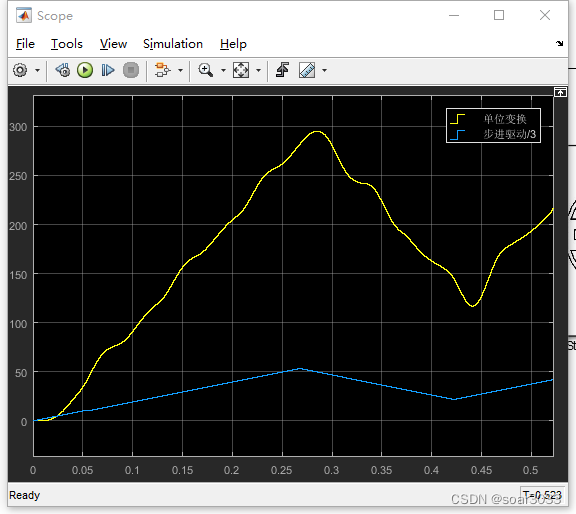
以下的运行曲线,蓝色为驱动接收到的控制脉冲,黄线为电机角度。
电流方式,以10Hz脉冲、16倍细分进行控制时:
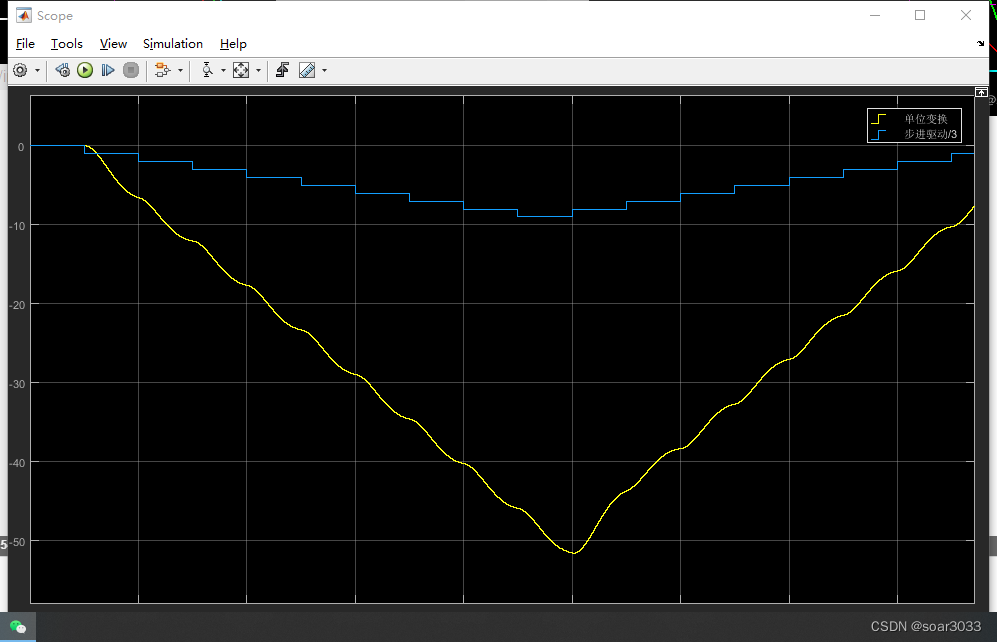
电流方式,以100Hz脉冲、16倍细分进行控制时:
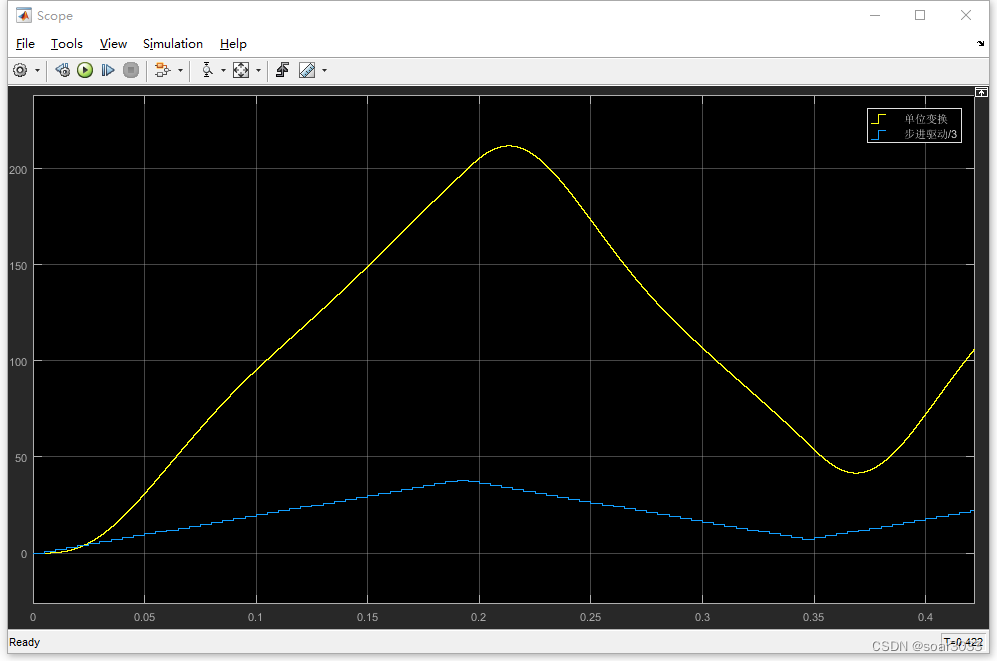
电压方式,以10Hz脉冲、16倍细分进行控制时:
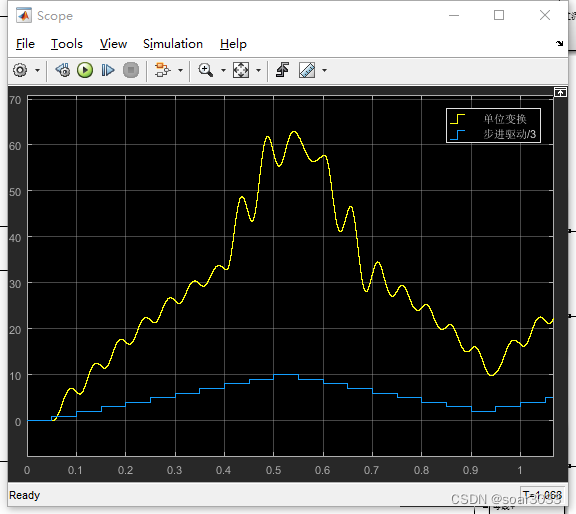
电压方式,以100Hz脉冲、16倍细分进行控制时:
从上面的运行结果看,以电流为目标进行控制似乎较电压控制表现更好(毕竟是更直接的控制),但也应该考虑最大电流设定值的影响。实际上在不同的最大电流设定下电流控制、电压控制的表现会有一定变化。并且电流控制时PI控制器的整定也会对结果有很大的影响。


















 3868
3868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











