







Asymmetric Non-local Neural Networks
论文:Asymmetric Non-local Neural Networks for Semantic Segmentation,ICCV,2019.
链接:paper
代码:github
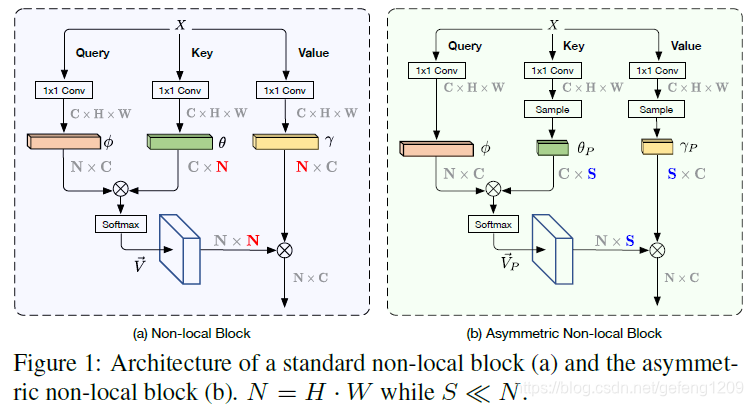
本文是在Non-local Neural Networks(cvpr,2018) 这篇论文的基础上改进得来的,non-local block Non-local模块作为语义分割任务中很有用的技术,但因为计算量较大,需要较大的显存开销,这阻碍了non-local network在实际应用中的使用。本文提出了APNB来减少non-local block的计算量和显存开销,AFNB通过提升分割性能增强non-local block的学习能力。我们着重分析这篇论文的改进点。
Revisiting Non-local Block
输入
1.经过3个1x1的卷积Query,Key和Value变换之后,分别得到 :  ,
, ,
,
2.计算所有空间位置特征向量的相似度:
3.归一化:
4.根据所有空间位置特征向量的相似度加权求和:
5.新特征经过1*1卷积变换后与原输入特征拼接:
计算复杂度:
Asymmetric Pyramid Non-local Block(APNB)
Non-local 的计算复杂度主要来自第2步和第4步:

可以看出经N(红色)改变为S,不会改变输出的size。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1987
1987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









