







6.1 瞰景Smart3D提交重建
6.1.1 创建重建任务
确认空三无误,进行三维重建工作。
在重建任务集上右键,选择创建重建任务。
在弹出的对话框中,输入提交模型的名称,点击下一步。
瓦片坐标系:只有具有地理参考属性的工程内可用,定义了建模区域和瓦片所在空间框架中的坐标系统,与最终输出的三维模型坐标系无关。
由于模型整体输出需大量内存,一般的电脑内存不够,所以需要对模型进行分块处理,使其占用合理内存。选择模型分块模式,确定分块大小。分块大小由电脑内存决定,为了保证每个分块得以运行,分块所耗内存应不大于内存的1/2。确定分块大小后,勾选编辑包围盒,可在下方三维视图中调整模型生成范围,通过鼠标拖拽包围盒的四边来调整范围。
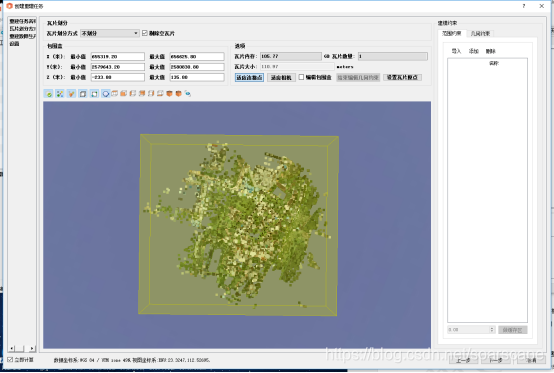
区域划分
定义三维模型输出范围,显示为一个半透明范围框。默认情况下,范围会包括所有连接点,可以通过手动编辑范围框范围或约束重建范围的 方式,去除不参与重建的区域。
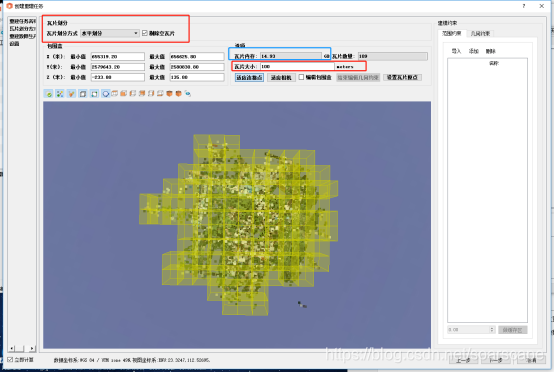
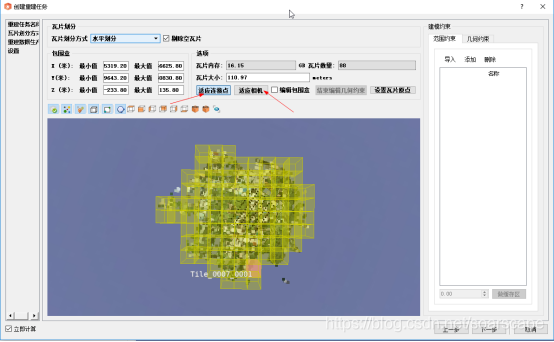
瓦片划分
考虑到三维场景往往包含大片区域,当作为一个整体进行重建时,电脑内存不足以支撑如此庞大的数据量。软件建议对模型进行切割,划分成较小的瓦片再进行重建运算。
软件提供三种瓦片划分方式:
不划分:模型不分割瓦块
水平划分:在XY平面上将模型分割成瓦块
空间划分:把重建区域分割成规则立方体瓦块
进行瓦块分割时,软件会计算每个瓦块占用的内存,根据实际电脑配置确定大小即可,一般建议瓦片大小不超过电脑运行内存1/2。
设置瓦片原点
在重建坐标系中定义瓦片的模型坐标系的原点位置
数据自适应:自适应模型坐标系是为了使大多数数据位于原点附近,避免模型数据坐标值太大而引起的数据丢失问题。
用户自定义:根据需要自定义瓦块原点。
6.1.2 范围约束
瞰景Smart3D 提供多种方式进行成果范围约束。
适应连接点
模型生产时将所有连接点纳入生产范围(即默认范围)。
适应相机
模型生产时以飞行的曝光点位置数据投影范围作为生产范围。
瞰景Smart3D 也支持通过导入已有的生产范围或手动添加范围的方式进行成果范围约束。
范围约束
导入
软件支持导入KML和SHP格式。本地坐标系推荐使用SHP格式。
点击导入,选择相应的范围文件进行导入即可。
添加
通过鼠标直接绘制模型生产范围。绘制时左键开始,右键结束。绘制完成后即可获得一个多边形约束范围。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7542
7542

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











