







最近比赛用到激光雷达和地图建模,手上有快思岚A1-m8的激光雷达
ubuntu 18.04安装
链接:https://pan.baidu.com/s/1L4Eg_9x9QiWYJ_3sRKoIVA
提取码:v1je
--来自百度网盘超级会员V5的分享
这是ubuntu的镜像
烧写到新的树莓派发现开机不了,
于是查阅资料发现要替换树莓派的固件。发现ubuntu 18.04更换固件就能安装,而ubuntu mate 20.04安装就系统安装崩溃
替换固件:烧录好镜像镜像之后再SD卡中把解压的压缩文献替换掉。
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo nano /etc/apt/sources.list将里面ubuntu官方网址http://ports.ubuntu.com 改为 mirrors.ustc.edu.cn
可以参考Ubuntu Ports 源使用帮助 — USTC Mirror Help 文档
更新一下软件安装包
sudo apt-get update更新之后发现树莓派18.04没有网络连接,然后去连接路由器,这里尝试了去在树莓派里面wpa_supplicant.conf,发现这个方法不行。
然后连接上网线
sudo apt-get install ubuntu-desktop安装ROS
1.设置软件源ROS/Installation/UbuntuMirrors - ROS Wiki
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'2.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543. 安装ROS。这里选择功能最全的desktop-full,包含ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception。它有约1000个软件包,需要约2.5G空间,安装时间20分钟左右。
sudo apt update
sudo apt install ros-melodic-desktop-full这里报错,由于缺少依赖包
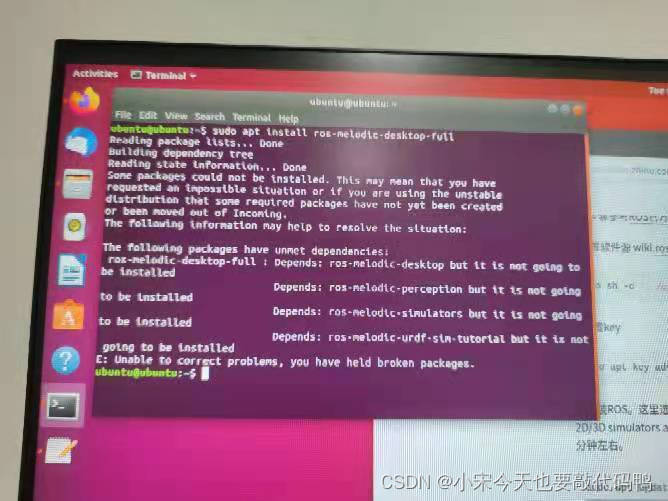
ros-melodic-desktop-full:Depends:ros-melodic-desktop but it is not going to be installed ......
E:Unable to correct problems,you have held broken packages.
百度了很多方法 说什么aptitude 的没什么用。最后还是打开软件和更新 把第一个















 1894
1894











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









