










电机控制中的PID
FOC算法中的电流环,速度环都涉及到PID控制
PID又分位置式PID控制算法和增量式PID控制算法,而个人认为在电机控制中使用增量式PID效果会更好一些。下面主要介绍几种增量式PID控制算法及C代码实现。
1.抗积分饱和PID
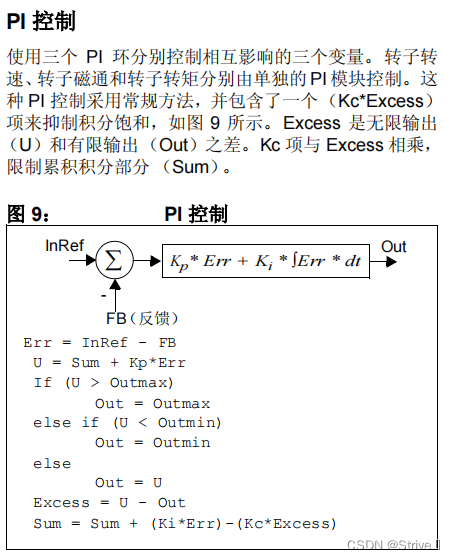
1.1AN1078文档中的PID
PI结构框图和原理
C代码实现:
//电流环D轴PI控制
void PI_Control_D( PID_ID_TypeDef *dParm)
{
int32_t U,Excess;
U = (dParm->Id_Sum + dParm->Id_Kp*dParm->Id_Err)>>12;
if(U > dParm->Id_OutMax)
{
U = dParm->Id_OutMax;
}
else if(U < dParm->Id_OutMin)
{
U = dParm->Id_OutMin;
}
else
{
dParm->Id_Out = U;
}
Excess = U - dParm->Id_Out;
dParm->Id_Sum = dParm->Id_Sum + dParm->Id_Ki*dParm->Id_Err - dParm->Id_Kc*Excess;
}
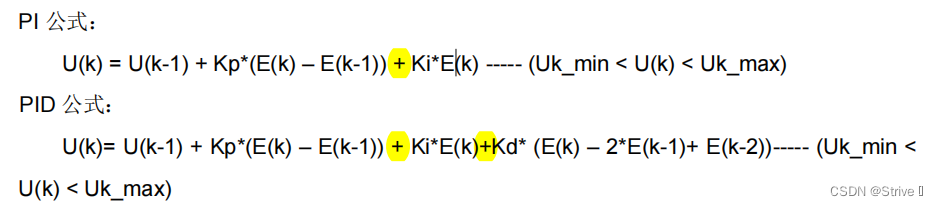
1.2传统增量式PID
离散化公式:
C代码实现:
int16_t PIDControl_Q(PID_IQ_TypeDef * PID, int16_t Ref, int16_t Cur)
{
int32_t Kp_Out, Ki_Out, PID_Out,PID_Out_Last;
if (!PID->Iq_Err)
{
PID->Iq_Err = Ref - Cur; // 初始化PID当前偏差
PID->Iq_Err_Err = PID->Iq_Err - PID->Iq_Err_Last1; // 初始化PID上次偏差和上上次偏差之差
PID->Iq_Err_Last1 = Ref - Cur; // 初始化PID上次偏差
PID->Iq_Err_Err_Last1 = PID->Iq_Err_Err;
}
else
{
PID->Iq_Err_Last1 = PID->Iq_Err; // 保存PID上次偏差
PID->Iq_Err = Ref - Cur; // 计算PID当前偏差
PID->Iq_Err_Err = PID->Iq_Err - PID->Iq_Err_Last1; // 计算PID上次偏差和上上次偏差之差
}
Kp_Out = ((int32_t)PID->Iq_Kp * (int32_t)PID->Iq_Err_Err)>>12;
Ki_Out = ((int32_t)PID->Iq_Ki * (int32_t)PID->Iq_Err)>>12;
PID_Out = PID->Iq_Out;
PID_Out += Kp_Out + Ki_Out;
if (PID_Out > PID->Iq_OutMax)
{
PID_Out = PID->Iq_OutMax; // PID最高输出
}
if (PID_Out < PID->Iq_OutMin)
{
PID_Out = PID->Iq_OutMin; // PID最低输出
}
PID->Iq_Out = PID_Out;
return PID->Iq_Out;
}
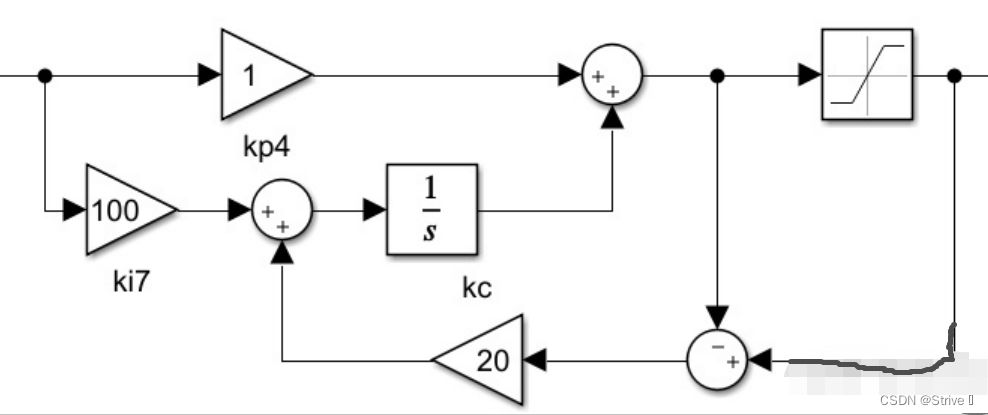
1.3back-cal PID
结构框图:
C代码实现:
/**
* PI controller
* */
static float _pi(struct BackCalPID *that, float err)
{
that->i_err = err;
own.m_pre_out = that->i_err * own.m_kp + own.m_sum;
that->o_out = own.m_pre_out;
/*output clamp*/
if (that->o_out > own.m_out_up)
{
that->o_out = own.m_out_up;
}
else if (that->o_out < own.m_out_low)
{
that->o_out = own.m_out_low;
}
/*back-cal dynamic Integrator clamp*/
own.m_sum += that->i_err * own.m_ki + own.m_kc * (that->o_out-own.m_pre_out);
return that->o_out;
}
上述具体的PID.c/.h文件链接:
https://download.csdn.net/download/strive3/87124205
以上几种PID控制算法均可以实现电机控制中的电流环,速度环PI控制。
2.学习资料
附上一些视频和文章资料,大家如果感兴趣可以看看。
2.1TI公开课:
链接: https://www.bilibili.com/video/BV1LE411W7M9/?p=5
2.2王博视频:
2.3知乎王崇卫的文章:
文章中介绍了多种PID,并在matlab中做了仿真比较。
链接: https://zhuanlan.zhihu.com/p/436897732














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









