







 本文详细介绍了InSAR技术反演数字高程模型(DEM)的全过程,包括数据要求、步骤详解及参数设置。从基线估算、配准到生成干涉图,再到轨道精炼,最终实现相位到高程的转换。
本文详细介绍了InSAR技术反演数字高程模型(DEM)的全过程,包括数据要求、步骤详解及参数设置。从基线估算、配准到生成干涉图,再到轨道精炼,最终实现相位到高程的转换。
【InSAR】InSAR技术是利用雷达系统获取同一地区两幅SAR影像所提供的相位信息进行干涉处理,来获取地表的三维信息,可以建立目标地区的数字高程模型。另外一个重要应用是获取地表的形变
InSAR技术反演DEM
【思路】利用一对SAR数据的相干相位信息反演DEM
数据要求
若要反演DEM,则必须满足以下5个要求的数据对
- SLC数据对,要具有相位信息。例如做多视处理后相位信息就丢失了
- 数据拍摄的几何形态要一致,即入射角要一致
- 极化方式(VV、VH)要一致
- 轨道方向(升轨、降轨)要一致
- 数据覆盖范围具有重叠区
反演DEM的步骤
可先利用默认参数将过程跑一边,查看结果的快视图,判断哪个地方出了问题,再根据帮助文档(在工具左下角的问号图标打开帮助文档)修改相应参数
【工具位置】SARscape提供反演DEM的工具流,方便流程化处理:SARscape-->Interferometry-->InSAR DEM workflow
【使用前的准备工作】
- 【设置工作的默认文件夹】使用此工具流之前,设置系统参数,将数据缓存地址,输出地址等提前设置好,默认缓存数据的文件夹在C盘(
C:\Users\PasserQi\AppData\Local\Temp\SARsTmpDir_***) - 【设置符合数据源的系统参数】使用此工具流之前,选择你使用数据的系统参数。例如此选择的是COSMO SkyMed HIMAGE 3米的数据,则选用VHR的系统参数:
SARscape-->Preferences-->Load Preference-->VHR(better than 10m) - 【设置制图精度】即DEM反演结果的分辨率,例如COSMO SkyMed HIMAGE 3米的数据可选择5米:
SARscape-->Preferences-->General parameters-->Cartographic Grid Size(m)-->修改为5 - 【事先导入】使用此工具前,数据要先导入成slc数据
- 【保存工程】此工具流可以保存成工程(工具中间下放有一个保存按钮),方便随时打开重做
- 【生成快视图】在每一步中,可以在Global参数中,将
Generate Quick Look设置成True,即生成快速图,方便查看和出图
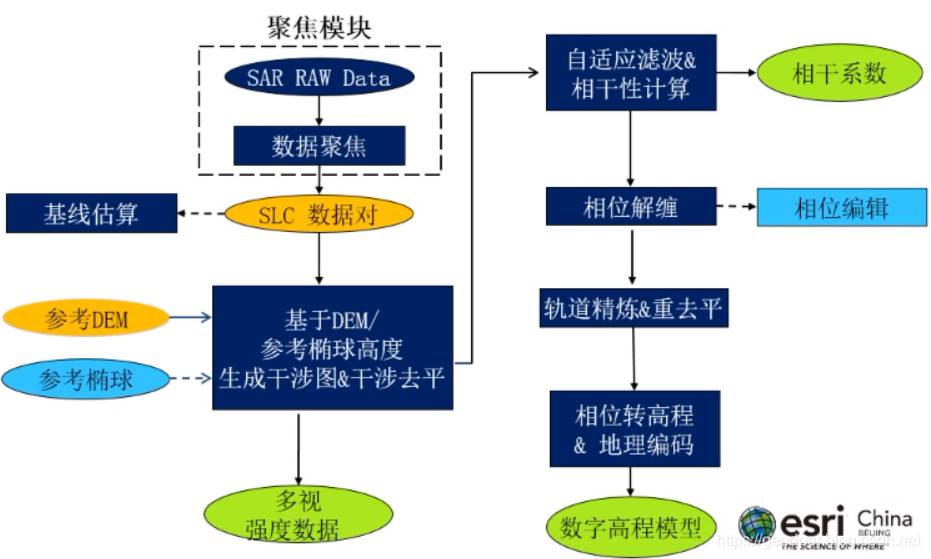
一、基线估算
(1)基线估算的背景
【空间基线】卫星两次拍摄的位置是有一定的距离的,这个距离称为空间基线
【失相干】如果空间基线较长,两个数据就有可能失相干(即相位之间没有干涉信息)。故空间基线要满足一定的阈值,才能够进行InSAR分析
【时间基线】两次拍摄的时间相隔太长也会导致失相干(此为时间失相干)
只有在获得地面反射至少有两个天线重叠的时候才可以产生干涉,当基线垂直分量超过了临界值的时候,没有位相信息,相干性丢失,就无法做干涉
(2)基线估算的作用
用来评价干涉影像对的质量,检查数据是否满足基线阈值。计算基线、轨道偏移(距离向和方位向)和其他系统参数。
1.时间基线:越短越好
2.空间基线:在一定范围内越长(但要一定要远小于阈值),对地形、高程的探测敏感越高
(3)基线估算的工具
基线估算有两个工具
- 两景数据:
SARScape-->Interferometry-->Interferometric Tools-->Baseline Estimation - 多景数据:
SARscape-->Interferometry-->Interferometric Tools-->Multi Baseline Calculation
(4)Baseline Estimation工具(两景数据的基线估算)说明
工具位置:SARScape-->Interferometry-->Interferometric Tools-->Baseline Estimation
操作说明:
Input Master File:输入主影像,一般更早的那景为主影像Optional Files-->Output Baseline Root Name:可选,即输出结果。若不填即表示计算完打印一下就好,不输出到文件中
结果说明:
| 结果 | 说明 |
|---|---|
Normal Baseline(m) = 180.504 | 空间基线,在拍摄时两个传感器间隔的距离180.504米 |
Critical Baseline min-max(m) = [-6400.098] - [6400.098] | 临界基线,即若空间基线大于6400.098表示两个数据失相干了。一般在应用中需要小于临界基线的十分之一 |
Absolute Time Baseline (Days)=1 | 时间基线 |
Range Shift (pixels) = 0.515 Azimuth Shift (pixels)=0.038 | 数据在方面向、距离向的偏移量,之后可以通过配准来校正 |
2 PI Ambiguity height (InSAR) (m) = 58.925 | 2PI模糊高程(即一周期的相位变化对应的高程变化)。相位变化是周期性的,相位变化2PI对应的高程变化量是58.925。此参数越小,高程测量的精度越高。此参数与空间基线是反比关系。 |
2 PI Ambiguity displacement (DInSAR) (m) = 0.016 | DInSAR精度为0.016 |
1 Pixel Shift Ambiguity height(Stereo Radargrammetry) (m) = 6285.378 | 立体量测的精度6285.378m(哨兵数据适合做InSAR、不适合应用于立体量测) |
1 Pixel Shift Ambiguity displacement (Amplitude Tracking (m) = 1.666 | 振幅偏移量测,做大的形变(完全失相干的形变,如滑坡、冰川移动等)的精度是1.666米 |
Master Incidence Angle = 48.963 Absolute Incidence Angle difference = 0.011 | 主影像入射角48.963,主从影像相差0.011 |
二、配准
【配准】主辅影像基于相位的配准
【作用】将多幅SAR影像进行地理配准,统一栅格单元的位置
【工具位置】SARscape-->Basic-->Intensity Processing-->Coregistration
【配准结果】_rsp文件。若没有配准好,将多景进行彩色显示,会产生重影
【说明】
1.Input File List:参与配准的SAR影像(_pwr强度数据)
2.Input Reference File:配准的主影像(_pwr强度数据)
3.DEM File:可选项(_dem文件)。若是Sentinel数据必须提供,哨兵数据就是基于DEM进行配准的
4.Coregistration With DEM:是否用DEM配准,设置为True
三、生成干涉图&干涉去平
【生成干涉图&干涉去平】两个相位共轭相乘所得结果即为干涉图。但干涉图具有平地效应,需要干涉去平
【干涉条纹】:即是干涉相位图形化显示的结果,可以打开*_int_ql.tif干涉快视图进行查看
- 一个颜色周期就代表相位的一次2π变化:红色-黄色-蓝绿色为一个完整的2PI变化周期
- 干涉条纹越密集,此地方的地表高程变化越大,起伏的越厉害。这些是要保留下来的地形相位
- 间隔相同,有规律的条纹是由于平地效应所造成的,可以通过去平工具去除


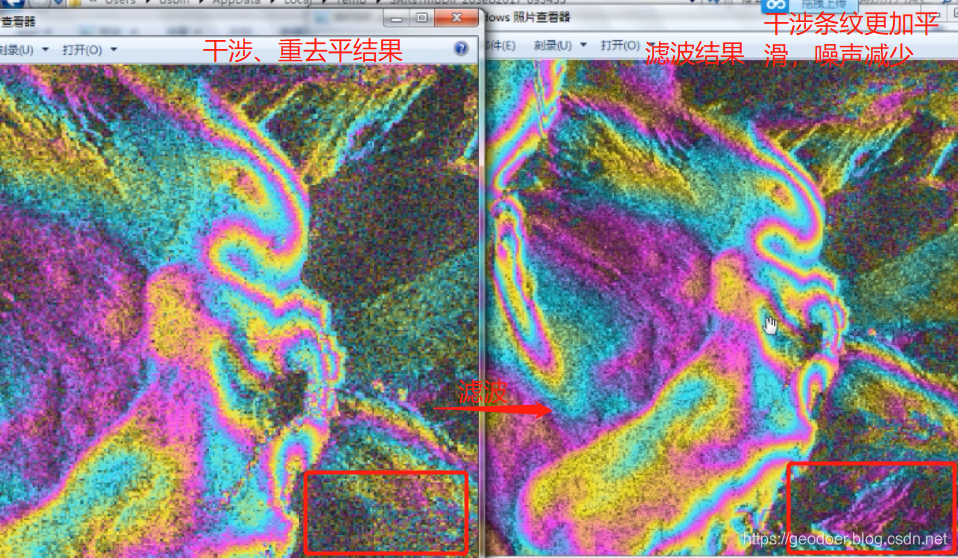
【去平之后的干涉图像】:去除间隔相同,由平地效应造成的干涉条纹。保留因地形起伏、高程起伏所导致的干涉条纹。可以打开*_dint_ql.tif来查看。接下来就是进行滤波,去除一些噪声,让干涉条纹变得更加平滑。

四、自适应滤波&相干性计算
【自适应滤波&相干性计算】对干涉图进行滤波,抑制斑点噪声,提高相干性,使干涉条纹更加平滑。得到相干性图(_cc_ql.tif)、滤波后的干涉图(_fint_ql.tif)
【工具说明】
1.Adaptive Filter and Coherence Generation-->Filtering-->Goldstein Min Aplha、Goldstein Max Alpha
若要增加滤波强度,可同步增加这两个参数,Max不要超过4,Min可以改为1
【滤波后干涉图】
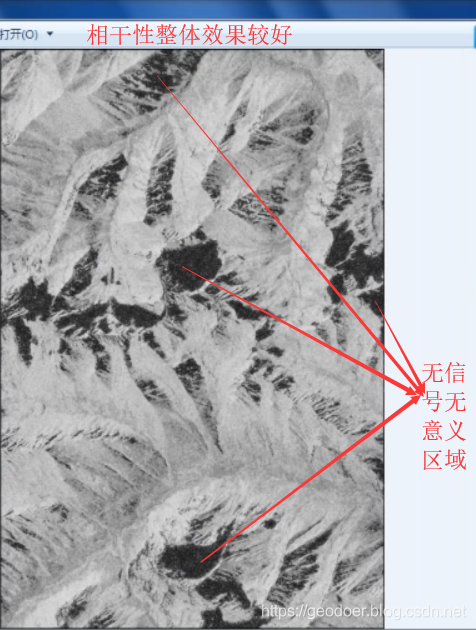
【相干性图】代表每个像元的相干性,值处于0到1之间
- 值越大(图中亮的区域),表示相干性越好,得到的结果越精确
- 黑色区域代表无意义、无信号的区域,噪声很大,都是不可信,需要利用插值进行处理
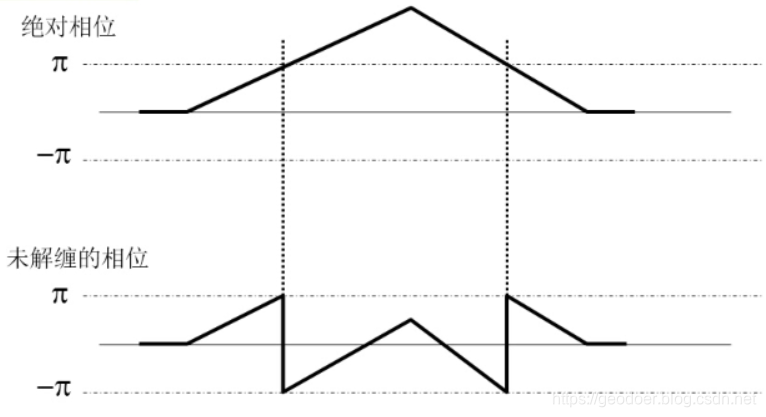
五、相位解缠
(1)相位解缠
得到连续的地形变化
(2)分解等级
Unwrapping Decomposition Level
解缠会对数据进行过采样,即先采样成低的分辨率,再进行解缠,解缠结束后,再采样成高分辨率。
分解等级即是指此采样的倍数,最高不能超过3。倍数越大,重采样更粗,处理的速度更快,可以避免一些解缠的错误。一般对特殊地形采取更高的采样倍数。若保持原有分辨率进行采样,可设置为-1
(3)解缠相干性阈值
Unwrapping Coherence Threshold
表示:相干性小于此阈值的区域不具有意义,故不进行解缠。这个值设的越大,代表对相干性越严格,解缠结果就越少
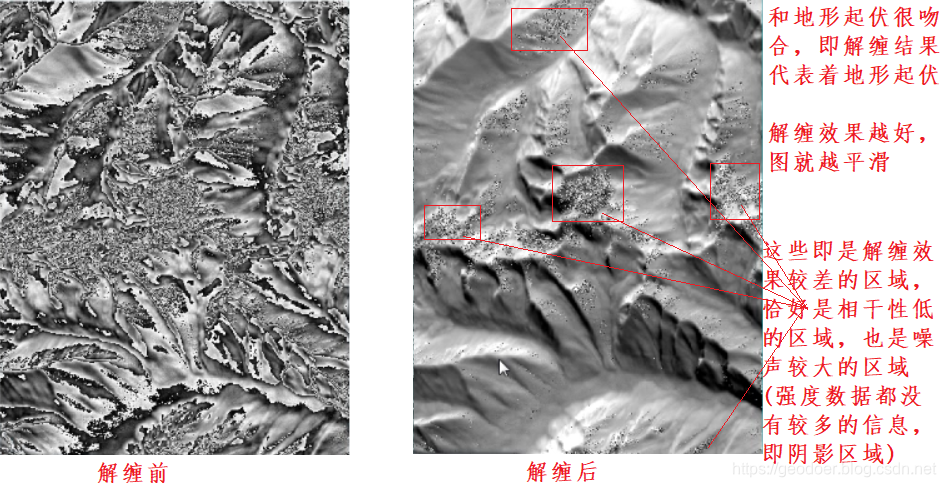
(4)结果
解缠结果(*_upha.tif)出现类似状况,可以增大解缠相干性阈值,忽略噪声区域,让结果更平滑
六、轨道精炼&重去平
(1)轨道精炼&重去平
【背景】当轨道参数不够精确,影响从干涉相位转变为地形高度
- 使用GCP重新定义基线参数
- 计算相位偏移(如获取绝对相位值)
- 重新修改解缠图像的头文件中的轨道参数
【轨道优化】通过人为添加的GCP点,进行轨道重计算
【效果】轨道参数不精确会导致干涉图上有大的轨道残差(即分布在整个干涉图上的大条纹),通过GCP控制,轨道误差去除的效果是非常明显的
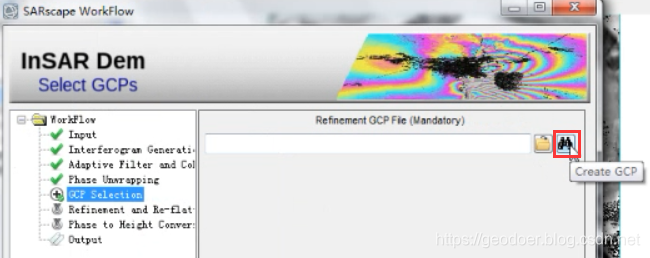
(2)工具使用说明
【步骤一】创建控制点
【步骤二】选择参考文件
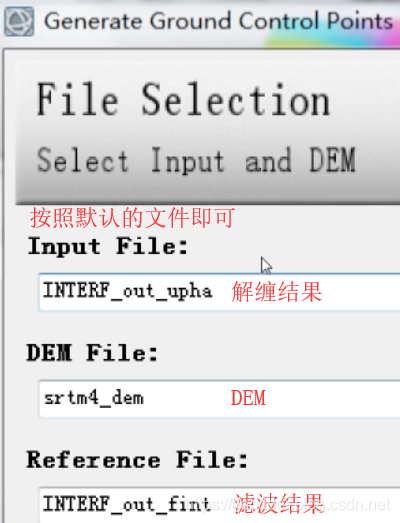
【步骤三】选择控制点
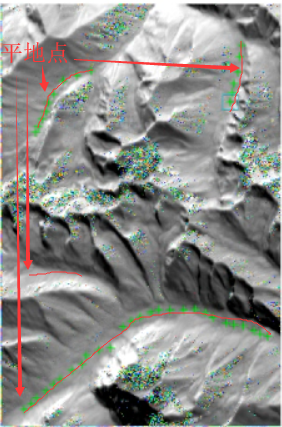
背景:在光学遥感中GCP代表的是已知坐标的点(如河流拐点、道路交点等地表特征点)。但在SAR影像中,GCP选的是相位稳定的点,相干性高,相位没有发生变化的点,即平地点
GCP点个数:轨道精炼是基于多项式,若GCP点太少,程序会将默认的三次多项式降到二次多项式,建议选择10个以上
选择原则:选高程没有变化的地方(即平地)
- 在
_fint滤波后干涉图像中,平地即是条纹未变化区域,即要避免选择条纹变化区域(地形起伏的区域),用彩色显示干涉条纹辅助观察(右键out_fint数据-->Change Color Table->Rainbow) - 由于
upha解缠结果即代表地形起伏,则在解缠结果中,平地即是比较平滑点,要避开噪声点
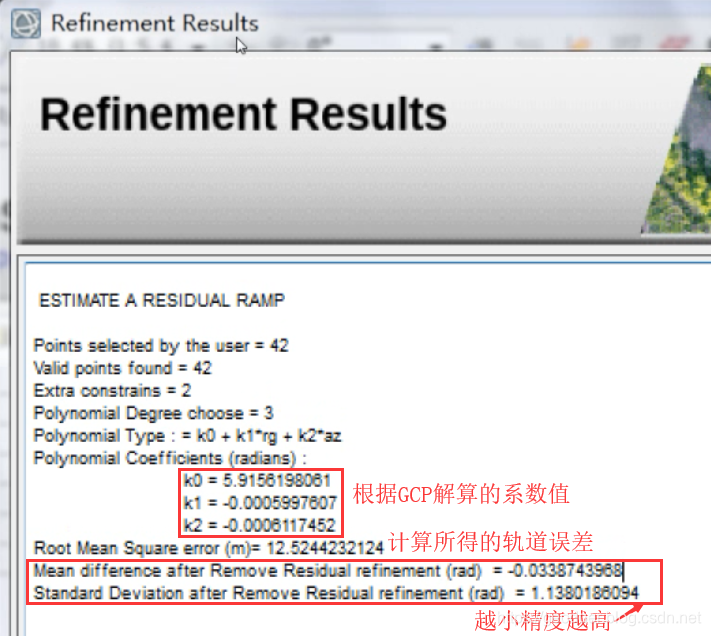
【步骤四】选择GCP之后,即是Refinement and Re-flattening
(3)结果说明
重去平结果:_reflat_upha即根据新的轨道参数重新去平的结果
结果报告:若精度较差,可在刚才的基础上再次选择GCP,再做一两次
七、相位转高程&地理编码
(1)产品的相干性阈值
Product Coherence Threshold:此要大于等于解缠的阈值。小于此阈值的不转换为高程
(2)小波等级
【地形残差】参考的DEM一般分辨率是比较粗的(比如SRTM的90米分辨率的DEM),但通过此工具反演的分辨率可以达到5米,而90米作为5米的参考,就会导致一个地形残差(可以理解为数据空洞)
【小波等级】Wavelet number of levels,利用此方法修正的地形残差
【公式】
S
A
R
数
据
的
分
辨
率
∗
2
n
≈
参
考
D
E
M
的
分
辨
率
SAR数据的分辨率*2^n ≈ 参考DEM的分辨率
SAR数据的分辨率∗2n≈参考DEM的分辨率,求出n即是此参数的值
例如:SAR分辨率为3米,参考的DEM使用的是90米的分辨率,可以解算出n=5(
3
∗
2
5
≈
90
3*2^5≈90
3∗25≈90),则Wavelet number of levels设成5
(3)输出类型
1.Ellipsoidal:椭球高
2.Ellipsoidal and Geoidal
(4)设置内插
对小于产品相干性阈值的部分,用内插的方法进行填充。
在Geocoding参数中,Relax Interpolation设置为True
Dummy Removal:有效数据之外的边框数据是否去除,设置为True(将边框外的值改为NoData)
八、结果说明
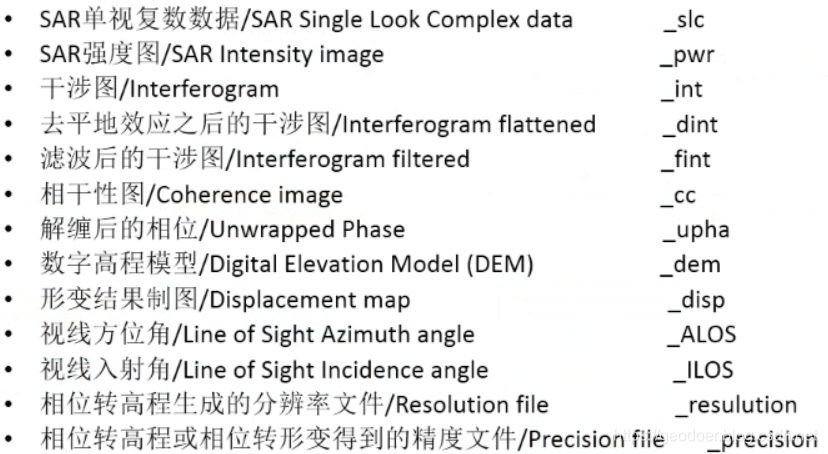
【结果文件说明】
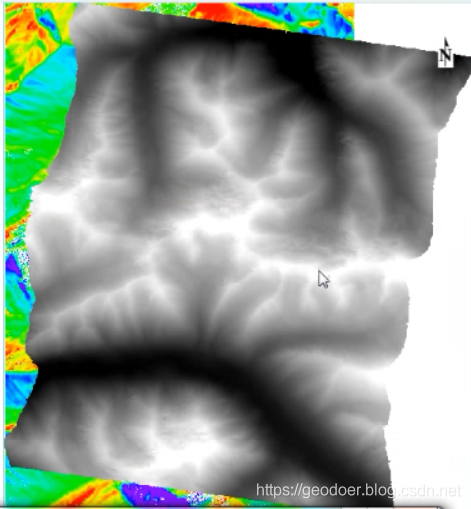
【结果预览】


















 1862
1862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











