







文章目录
前言
提示:这里可以添加本文要记录的大概内容:
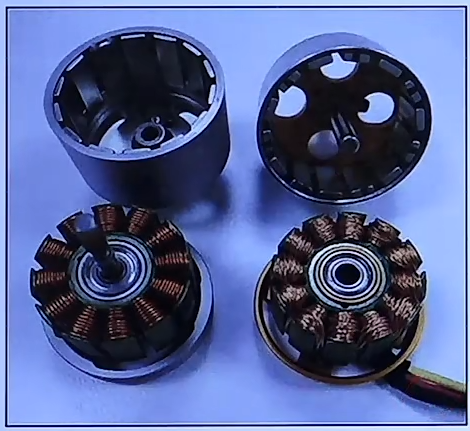
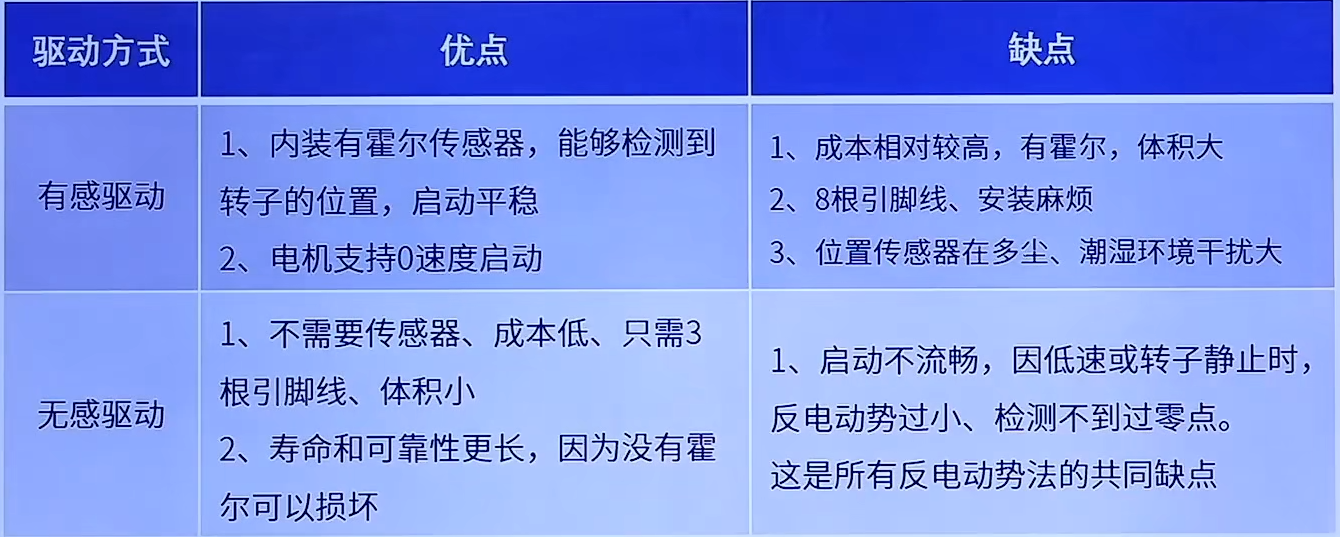
无刷直流电机(Brushless DC Motor,BLDC)因其高效率、长寿命和低噪声的特性,广泛应用于工业自动化、消费电子、机器人和电动交通工具等领域。传统的无刷直流电机驱动方法通常依赖于霍尔传感器来感知电机的转子位置,进而实现换向控制。然而,霍尔传感器虽然能够提供稳定的反馈,但增加了硬件复杂度,并且在一些特定的应用中,传感器本身可能成为系统的潜在故障点。
随着技术的不断发展,无感驱动(Sensorless Driving)作为一种无传感器控制技术,开始逐步取代传统的有感(传感器)控制方式。无感驱动通过实时估算转子位置,从而无需物理传感器来进行反馈,降低了系统的复杂性和成本,同时也提高了系统的可靠性。在无感驱动中,电流控制、反电动势(Back EMF)估算以及闭环控制等技术成为核心环节。
本篇文章将从无刷直流电机的基础知识开始,逐步深入讲解无感驱动的工作原理、电流采样方法、转子位置估算技术,并详细介绍如何实现无感驱动控制。
提示:以下是本篇文章正文内容,下面案例可供参考
一、无感控制简介
1.1 无感控制概述
无感控制(Sensorless Control)是一种新兴的控制技术,它通过实时估算转子的位置速度,消除了对物理传感器的需求。这种方法不仅简化了电机驱动系统的设计,还提高了系统的可靠性和耐用性。
以下是无感控制的几个关键点:
1. 工作原理
无感控制的核心在于利用电机的反电动势(Back EMF)信号来估算转子的位置。反电动势是电机在运行时产生的电压信号,与转子的位置和速度密切相关。通过对反电动势的分析,控制系统可以推算出转子的实时位置,从而实现无传感器的换向控制。
2. 转子位置估算
无感控制通常采用以下几种方法来估算转子位置:
- 反电动势估算:通过测量电机的相电压和电流,计算出反电动势,并根据其波形推算转子的位置。
- 电流模型:利用电机的电流特性,通过电流的变化来推算转子的位置和速度。
- 观测器设计:使用状态观测器(如卡尔曼滤波器)来实时估算转子的位置和速度,结合电机模型进行控制。
3. 控制策略
无感控制的实现通常涉及以下几种控制策略:
- 电流控制:通过控制电机的相电流来实现转速和转矩的调节。
- 闭环控制:将估算的转子位置反馈到控制系统中,形成闭环控制,提高系统的稳定性和响应速度。
- 速度控制:通过调节电机的输入电压和频率,精确控制电机的转速。
4. 优势与挑战
优势:
- 降低成本:无感控制消除了对传感器的需求,降低了系统的硬件成本。
- 提高可靠性:减少了机械部件的数量,降低了故障率。
- 简化设计:简化了电机驱动系统的设计,提高了系统的集成度。
挑战:
- 启动困难:在低速或静止状态下,反电动势信号较弱,可能导致启动困难。
- 控制精度:在某些工况下,位置估算的精度可能受到影响,导致控制性能下降。
- 复杂性:无感控制算法的设计和实现相对复杂,需要较高的控制策略和算法水平。
1.2 无感控制原理
无感检测的主要方法有: 反电动势过零点检测方法、反电动势积分范有电压比较法、反电动势积分及领相环法、续流二极管法、反电动势三次谱波检测法、感侧量法、 C(0) 函数法、扩展卡尔曼滤波法、状态观测器法等。这里我们主要使用反电动势过零点检测方法。它的主要核心就是通过检测定子绕组的反电动势过零点来判断转子当前的位置。
1.2.1 楞次定律
首先来熟悉一下楞次定律:
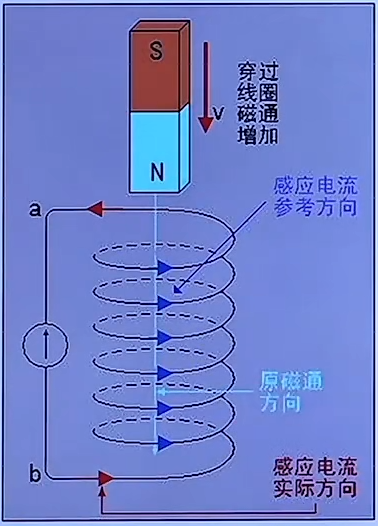
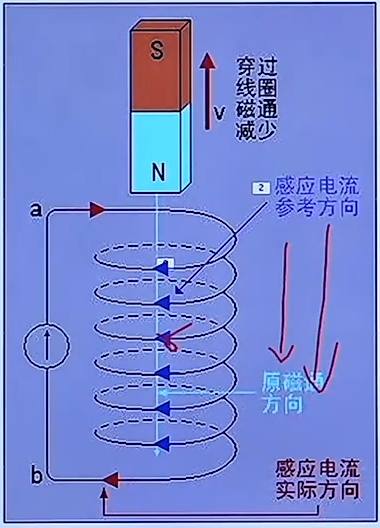
楞次定律(Lenz’s Law)是电磁学中的一个重要定律,主要用于描述电磁感应现象。它由德国物理学家海因里希·楞次(inrich Lenz)于1834年提出。楞次定律的核心内容是:在电磁感应过程中,感应电流的方向总是与引起感应电流的变化原因相反。(感应电流的磁场总要阻碍引起感应电流的磁通量的变化)
楞次定律的表述
楞次定律可以用以下方式表述:
- 当一个导体中的磁通量发生变化时,导体中会产生感应电流。这个感应电流的方向总是使得它所产生的磁场反对原有磁场的变化。
物理意义
楞次定律体现了能量守恒的原则。感应电流的方向总是试图抵消引起电流变化的原因,从而保持系统的稳定性。例如:
- 如果磁场的强度增加,感应电流会产生一个与原磁场方向相反的磁场,以抵消这种增加。
- 如果磁场的强度减小,感应电流则会产生一个与原磁场方向相同的磁场,以试图维持原有的磁场强度。
数学表达
楞次定律通常与法拉第电磁感应定律结合使用。法拉第定律表明,感应电动势(E)与磁通量的变化率(dΦ/dt)成正比:
其中,负号正是楞次定律的体现,表示感应电动势的方向与磁通量变化的方向相反。
应用实例
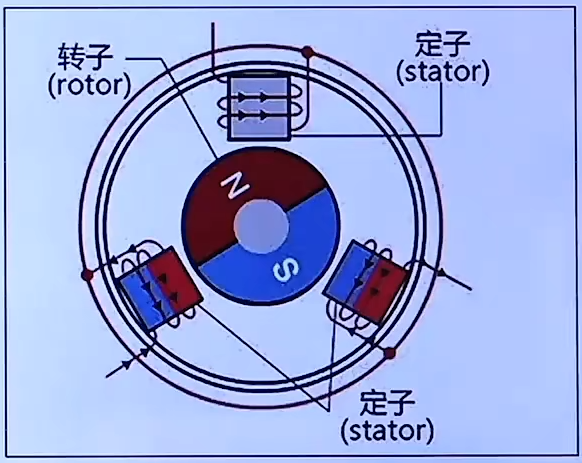
发电机:在发电机中,旋转的磁场会导致导体中的磁通量变化,从而产生感应电流。楞次定律确保了电流的方向与磁场变化相反。
电磁制动:在电动机或电磁制动系统中,当电流停止或改变时,楞次定律会导致产生反向电流,从而减缓运动。
感应加热:在感应加热中,变化的磁场会在金属中产生感应电流,导致金属发热,楞次定律确保了电流的方向与磁场变化相反。
总结:来拒去留
1.2.2 电动势
动生电动势:一种由于导体在磁场中运动而在导体内部产生的电动势。
感生电动势:一种由于磁场变化而静止导体中产生的一种电动势。(无刷电机)
1.2.3 过零点
在无刷直流电机(BLDC)无感控制中,零点(Zero Crossing)是一个重要的概念,主要涉及到电机反电动势(Back EMF)的特性。以下是对过零点的详细解释:
1. 过零点的定义
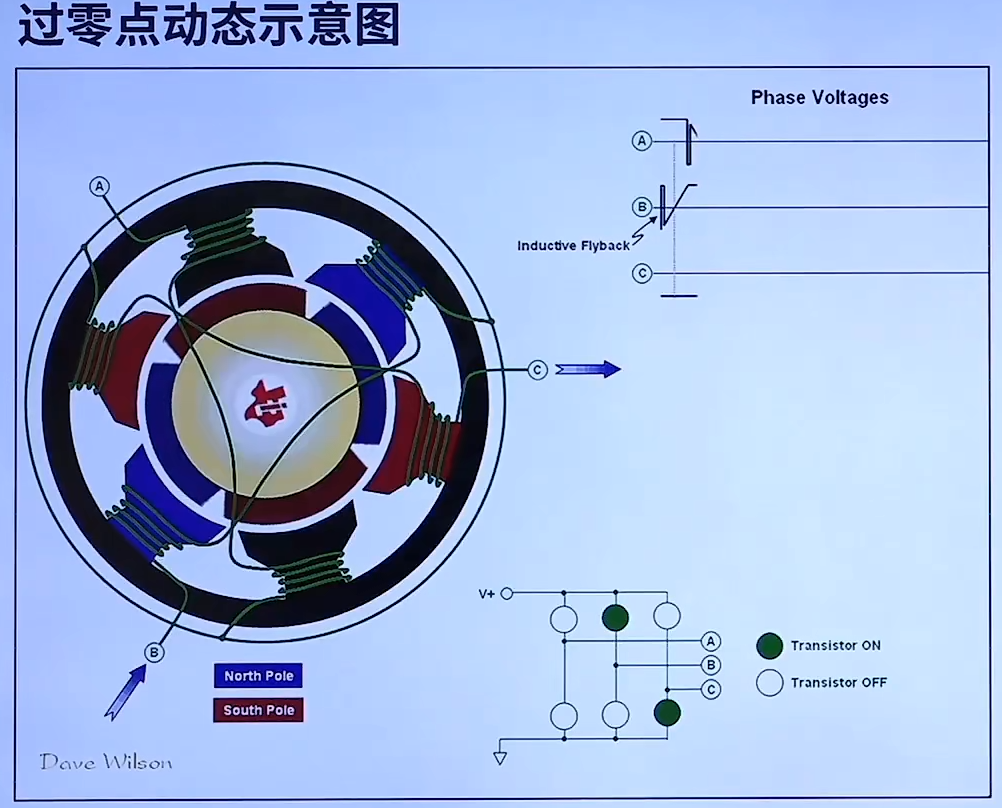
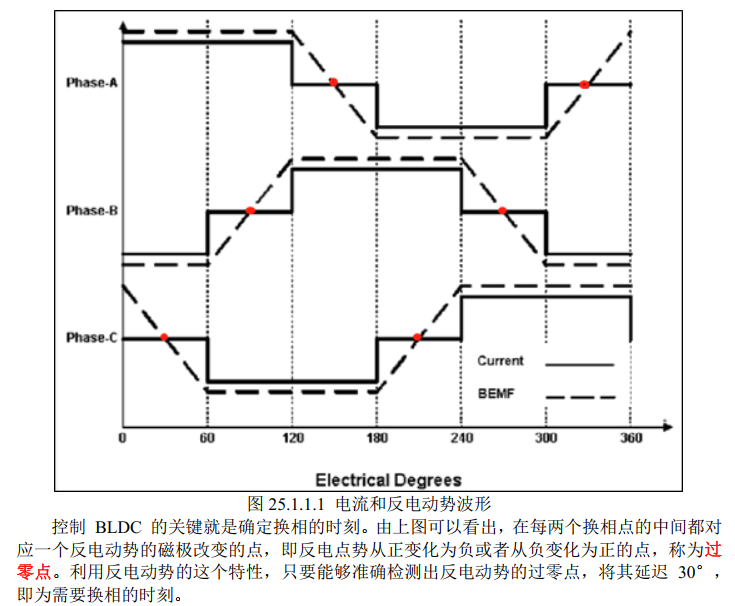
过零点是指电压或电流波形穿过零电平的瞬间。在无刷直流电机的控制中,过零点通常指的是反电动势波形从正值变为负值或从负值变为正值的时刻。
2. 反电动势与过零点
无刷直流电机在运行时,转子旋转会在定子绕组中产生反电动势。这个反电动势的波形与转子的角度密切相关,并且在转子旋转过程中会经历多个过零点。通过监测这些过零点,可以获取转子的位置和速度信息。反电动势过零点都发生在不通电的那一组
3. 无感控制中的应用
在无感控制中,由于没有物理传感器来提供转子位置的反馈,控制系统需要依 赖反电动势的过零点来估算转子的位置。具体来说:
位置估算:当反电动势波形发生过零点时,控制系统可以推断出转子大致的位置。这是因为在某些角度下,反电动势的值会接近零,表明转子与定子之间的相对位置关系。
换向控制:通过检测反电动势的过零点,控制系统可以决定何时进行换向,以确保电机在正确的时刻施加电流,从而实现平稳的运行。
4. 过零点检测方法
在无感控制中,过零点的检测通常可以通过以下几种方法实现:
电压比较:通过比较反电动势信号与零电平的关系,检测到过零点的瞬间。
滤波器:使用低通滤波器平滑反电动势信号,以减少噪声对零点检测的影响。
数字信号处理:利用微控制器或数字信号处理器(DSP)对反电动势信号进行采样和分析,以精确确定过零点。
5. 挑战与解决方案
低速运行:在低速或静止状态下,反电动势信号较弱,过零点检测可能不够可靠。为了解决这个问题,通常需要结合其他方法(如电流反馈)来辅助估算转子位置。
噪声干扰:电机运行过程中可能会产生电磁干扰,影响反电动势信号的清晰度。使用滤波器和适当的信号处理技术可以有效减少噪声的影响。
1.2.4 端电压与相电压
🔌 一、端电压(Terminal Voltage)
定义:
端电压是指某一相绕组的端点与直流负极(GND)之间的电压,也称为该相的对地电压。它是控制器采集反电动势信号的一个常用参考。在无感控制中的作用:
在驱动过程中,处于非导通状态(即未被驱动,浮空)的相,其端电压主要由反电动势主导。当这一相绕组没有施加驱动电压时,其端点的电压基本上反映了该绕组内部的感应电动势。因此,测量非导通相的端电压可以间接获得反电动势波形,用于转子位置估算。🔀 二、相电压(Phase Voltage)
定义:
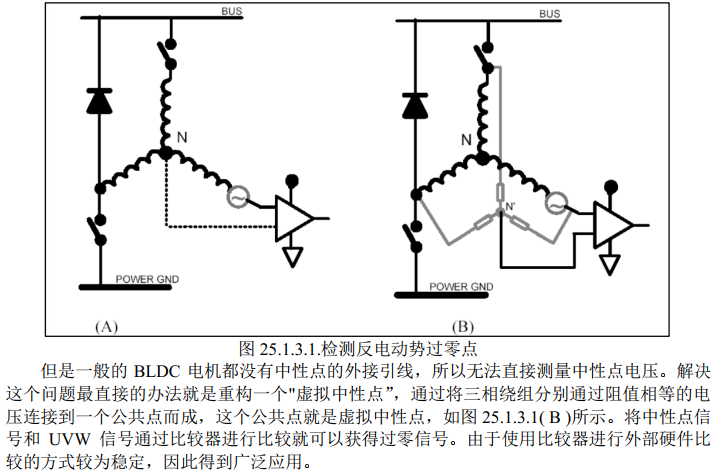
相电压是指某一相绕组的端点与三相绕组“星形连接点”(中性点,Neutral Point)之间的电压。在星形接法(Y型连接)的三相系统中,三相中心点通常是虚拟的或推算出来的(因为在BLDC中常常没有真实的中性点引出)。计算方法:
由于中性点未引出,通常使用三相端电压(Va、Vb、Vc)计算中性点电压 $ V_{n} $:Vn=Va+Vb+Vc3
然后用某一相的端电压减去中性点电压:
Vphase=Vterminal−Vn
在无感控制中的意义:
相电压能更准确地反映出该相反电动势的变化趋势。尤其是在三相电机中,反电动势是三相对称的正弦波(或梯形波),通过分析相电压的过零点(Zero Crossing)可以更清晰地识别出转子经过特定位置的时刻。✅ 小结对比
名称 定义 参考点 用途 端电压 相绕组端点对地电压 地(GND) 实时测量简单,直接采集 相电压 相绕组端点对中性点电压 三相中性点(虚拟) 更准确反映反电动势特性 🧠 应用举例
在实际的无感BLDC控制中,控制器会监控非导通相的端电压,判断其是否穿过中性点电压(即发生过零),从而确定下一次换向的时机。例如:
- 当 A 相未导通时,测量 A 相端电压;
- 一旦 A 相端电压穿过中性点电压(反电动势过零点),就意味着转子运行到一个特定角度;
- 控制器根据这个时间点,计算出延迟一段时间后进行换向,以实现平稳驱动。
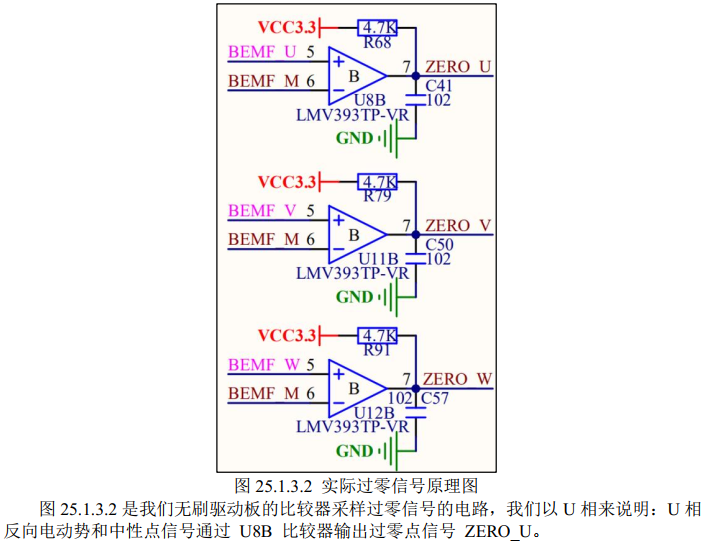
1.2.5 比较器模式采样过零信号

注意:1、通过过零信号的组合确定转子位置
2、过零点发生在换向提前30°时刻
1.2.6 闭环的建立



二、BLDC 方波启动技术
2.1 电机转子预定位
2.2 电机的外同步加速

2.3 电机运行状态的转换
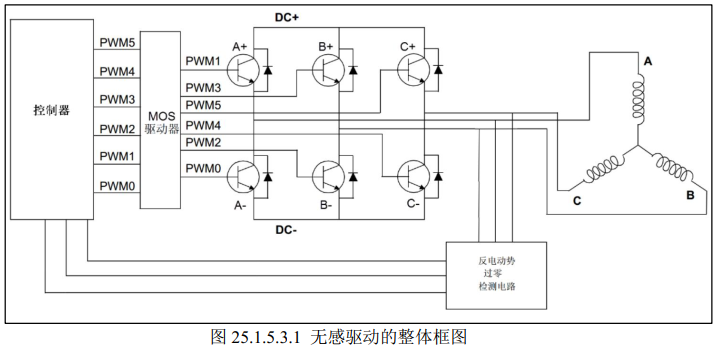
总结
提示:这里对文章进行总结:
例如:以上就是今天关于无刷电机无感控制的学习记录,主要介绍了一些基础的原理性内容。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









