







基本概念
1987年由 Kass 等人提出的主动轮廓模型即蛇模型(snake 模型)。活动轮廓模型可以用在图像分割和理解中,也适用于分析动态图像或三维图像。Snake定义为最小的能量样条曲线。下面重点介绍Kass的《Snakes:active contour models》这篇论文。
设v(s)=[x(s),y(s)]为活动轮廓线,s∈[0, 1]是弧长,其能量函数为:
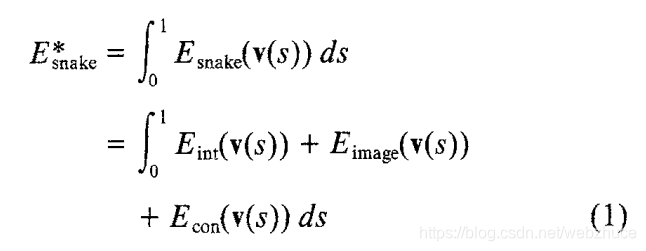
其中Eint表示曲线因为弯曲产生的内部能量,Eimg表示图像中得到的力,而Econ是外部的约束力。内部能量Eint由两部分构成:一阶导数的模(称为弹性能量)和二阶导数的模(弯曲能量)。

在迭代过程中,弹性能量能快速的把轮廓压缩成光滑的圆;弯曲能量将轮廓拉成光滑的曲线或直线,他们的作用是保持轮廓的光滑和连续性。通常alpha越大,轮廓收敛越快;beta越大,轮廓越光滑。外部图像能量Eimage由轮廓线、边缘和端点决定。

轮廓线Eline表示为

边缘能量Eedge表示为
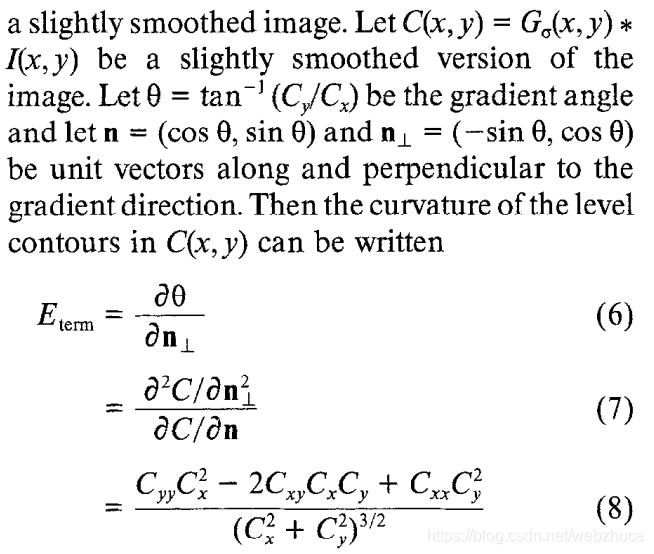
端点能量Eterm表示为
Kass在论文中给出求解方法。以下截图来自《Snake活动轮廓模型》,并将其中v"“改为v”’。

示例演示
下面我们根据Kass的论文用OpenCV实现算法。完整工程代码。
/**********************************************************************
Copyright (c) Mr.Bin. All rights reserved.
For more information visit: http://blog.csdn.net/webzhuce
**********************************************************************/
#include "kasssnake.h"
using namespace cv;
KassSnake::KassSnake(const cv::Mat& src)
{
if (src.channels() == 3)
{
cv::cvtColor(src, src_, CV_BGR2GRAY);
src.copyTo(image_);
}
else
{
src.copyTo(src_);
cv::cvtColor(src, image_, CV_GRAY2BGR);
}
src_.convertTo(src_, CV_32FC1);
}
void KassSnake::segment(std::vector<cv::Point2f>& points)
{
drawCurve(points);
//create pentagonal banded matrix
float a = 2.0 * alpha_ + 6.0 * beta_;
float b = -1.0 * (alpha_ + 4.0 * beta_);
float c = beta_;
const int h = points.size() + 1;
Mat A = diagonalCycleMat(h, a, b, c);
A = A + gamma_ * Mat::eye(A.size(), A.type());
Mat Ainv;
cv::invert(A, Ainv);
//E ext = E image + E con
Mat eline = getEline();
Mat eedge = getEedge();
Mat eterm = getEterm();
Mat eext = wline_ * eline + wedge_ * eedge + wterm_ * eterm;
//calculate fx, fy
Mat fx = eext.clone(), fy = eext.clone();
gradient(eext, fx, fy);
//iteration
Mat ssx(h, 1, CV_32FC1);
Mat ssy(h, 1, CV_32FC1);
Mat sx(h, 1, CV_32FC1);
Mat sy(h, 1, CV_32FC1);
for (int t = 0; t < interation_; t++)
{
for (int i = 0; i < h; i++)
{
cv::Point2f &point = points[i % points.size()];
ssx.at<float>(i, 0) = gamma_ * point.x - kappa_ * fx.at<float>(point);
ssy.at<float>(i, 0) = gamma_ * point.y - kappa_ * fy.at<float>(point);
}
sx = Ainv * ssx;
sy = Ainv * ssy;
//update points
for (int i = 0; i < points.size(); i++)
{
float x = sx.at<float>(i, 0);
x = std::max(0.0f, x);
x = std::min(x, float(src_.cols - 1));
points[i].x = x;
float y = sy.at<float>(i, 0);
y = std::max(0.0f, y);
y = std::min(y, float(src_.rows - 1));
points[i].y = y;
}
//for showing
drawCurve(points);
}
}
cv::Mat KassSnake::getEline()
{
return src_.clone();
}
cv::Mat KassSnake::getEedge()
{
Mat gx, gy, e = src_.clone();
gradient(src_, gx, gy);
for (int i = 0; i < src_.rows; i++)
{
for (int j = 0; j < src_.cols; j++)
{
float x = gx.at<float>(i, j);
float y = gy.at<float>(i, j);
e.at<float>(i, j) = -1.0 * std::sqrt(std::pow(x, 2) + std::pow(y, 2));
}
}
return e;
}
cv::Mat KassSnake::getEterm()
{
Mat src;
GaussianBlur(src_, src, Size(3, 3), sigma_);
Mat kernel;
kernel = (Mat_<float>(1, 2) << -1, 1);
Mat cx = conv2(src, kernel);
kernel = (Mat_<float>(2, 1) << -1, 1);
Mat cy = conv2(src, kernel);
kernel = (Mat_<float>(1, 3) << 1, -2, 1);
Mat cxx = conv2(src, kernel);
kernel = (Mat_<float>(3, 1) << 1, -2, 1);
Mat cyy = conv2(src, kernel);
kernel = (Mat_<float>(2, 2) << 1, -1, -1, 1);
Mat cxy = conv2(src, kernel);
Mat e = src_.clone();
for (int i = 0; i < src_.rows; i++)
{
for (int j = 0; j < src_.cols; j++)
{
float x = cx.at<float>(i, j);
float y = cy.at<float>(i, j);
float xx = cxx.at<float>(i, j);
float yy = cyy.at<float>(i, j);
float xy = cxy.at<float>(i, j);
float sxy = x * x + y * y + 1.0f;
e.at<float>(i, j) = (yy * x * x - 2.0 * xy * x * y + xx * y * y) / std::pow(sxy, 1.5);
}
}
return e;
}
cv::Mat KassSnake::diagonalCycleMat(int n, float a, float b, float c)
{
const int len = 5;
const int h = len / 2;
float J[5] = { c, b, a, b, c };
Mat A = Mat::zeros(n, n, CV_32FC1);
for (int i = 0; i < n; i++)
{
int j = i;
A.at<float>(i, j) = J[h];
int k = 1;
while (k <= h)
{
if (j - k < 0)
j = j + n;
A.at<float>(i, j - k) = J[h - k];
if (j + k > (n-1))
j = j - n;
A.at<float>(i, j + k) = J[h + k];
k++;
}
}
return A;
}
//same as C = conv2(A,B,'same')
cv::Mat KassSnake::conv2(const cv::Mat &src, cv::Mat &kernel)
{
//rotate kernel 180 degrees for convolution
flip(kernel, kernel, 0);
flip(kernel, kernel, 1);
Mat dstImage = src.clone();
int x = kernel.cols - 1;
int y = kernel.rows - 1;
copyMakeBorder(src, dstImage, y, y, x, x, BORDER_CONSTANT, 0);
x = kernel.cols / 2.0;
y = kernel.rows / 2.0;
filter2D(dstImage, dstImage, dstImage.depth(), kernel, cv::Point(0, 0));
return dstImage(cv::Rect(x, y, src.cols, src.rows));
}
void KassSnake::gradient(const cv::Mat &src, cv::Mat &gradx, cv::Mat &grady)
{
if (src.rows < 2 || src.cols < 2)
return;
src.copyTo(gradx);
src.copyTo(grady);
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
if(j == 0)
gradx.at<float>(i, j) = src.at<float>(i, j + 1) - src.at<float>(i, j);
else if(j == src.cols -1)
gradx.at<float>(i, j) = src.at<float>(i, j) - src.at<float>(i, j - 1);
else
gradx.at<float>(i, j) = (src.at<float>(i, j + 1) - src.at<float>(i, j - 1)) / 2.0;
}
}
for (int j = 0; j < src.cols; j++)
{
for (int i = 0; i < src.rows; i++)
{
if (i == 0)
grady.at<float>(i, j) = src.at<float>(i + 1, j) - src.at<float>(i, j);
else if (i == src.rows - 1)
grady.at<float>(i, j) = src.at<float>(i, j) - src.at<float>(i - 1, j);
else
grady.at<float>(i, j) = (src.at<float>(i + 1, j) - src.at<float>(i - 1, j)) / 2.0;
}
}
}
void KassSnake::drawCurve(std::vector<cv::Point2f> &points)
{
cv::Mat image = image_.clone();
for (int i = 0; i < points.size(); i++)
{
int j = (i + 1) % points.size();
cv::line(image, points[i], points[j], CV_RGB(255, 0, 0), 3, 8, 0);
}
cv::imshow("Iteration", image);
cv::waitKey(0);
}
void KassSnake::print(cv::Mat &src)
{
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j<src.cols; j++)
{
std::cout << src.at<float>(i, j) << " ";
}
std::cout << std::endl;
}
}
运行结果
分析总结
- 算法对变量的精度要求高,另外轮廓点一般要进行插值,使其个数达到一定数目。
- 算法依赖轮廓的初始位置(一般来说,初始轮廓必须位于真实边缘的附件,该模型才能正确地分割)
- 算法不能探测到图像中的凹陷的边界。















 1341
1341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









