







目录
BootStrapping原是推论统计学里的概念。所谓推论统计学,就是根据样本统计量来推算总体的统计量。n部方法通常会被用作eligibility trace思想的一个例子,这个思想允许BootStrapping在多个时间段同时开展操作。n 步BootStrapping的性能一般要比MC方法和TD方法要好。
n步TD 预测
TD(0)实际上是1步TD算法,之所以是“1”,是因为它只需要计算1个后继行为和1个后继状态来更新当前状态。以此类推,当计算了n个后继行为及n个后继状态来更新当前状态时,则为n步TD预测。当时,即为MC算法。如下图所示:

考虑根据“状态-收益”序列(省略行为A)来更新
的价值。在MC算法中,价值
,的估计会沿着一条完整的episode进行更新:

其中,是终止状态的时刻。在TD(0)中,累计收益是即时收益加上后继状态的价值函数估计值乘以折扣系数,称其为单步回报:

的下标表示一种截断回报,由当前时刻
到时刻
的累积收益和折后回报
组成,这种想法扩展到两步的情况为两步回报:

类似地,任意n步更新的目标是n步回报

n步回报可以看做是一个完整episode回报的近似,上式第n步(不包含n)以后的其余部分用来替代。如果
(即n步回报超出了终止状态),则其余部分的值都为0。基于n步回报的状态价值函数更新算法是:

在更新时,其他状态的价值估计保持不变:,这个算法被称为n步时序差分(n步TD)算法。
n步TD算法伪代码如下:

不同的,
比较

n-step Sarsa
该方法的核心思想是将状态替换为“状态-动作”二元组,然后使用-贪心策略。n Sarsa的回溯图和n TD的回溯图类似,都是由交替出现的状态和动作构成。唯一不同的是Sarsa的回溯图首末两端都是动作而不是状态。根据动作的价值估计定义n-step方法的回报如下:

当时,
。基于此,会得到算法

除了上面更新的状态之外,所有其他状态的价值都保持不变,即对于所有满足或
的
,
来说,
,这就是n步Sarsa算法。

n步off - policy学习
off - policy使用策略来学习策略
,需要考虑两个策略
、
的不同,所以需要使用相对概率。由于方法中,回报根据n步来建立,所以需要考虑n步的相对概率。例如实现一个简单off-policy版本的n步TD学习,对于
时刻状态价值的更新,可以用
来加权。

其中是重要度采样率,是两种策略采取
这
个动作的相对概率。

假设策略永远不会采取某个特定动作,即
,则n步回报的权重为0,即完全忽略。另一方面,如何策略
采取某个动作的概率很大,则这个权重也会增加。所以n步Sarsa更新方法的off - policy版如下:

off - policy n - step Sarsa方法如下:

Per-reward Off - policy 方法
对于普通n步方法的回报,像所有回报一样,可以写成递归方式。
然后考虑off - policy的影响(不同的策略,目标策略和行为策略
而产生的影响),对于t时刻的第一次收益
和下一个状态
都必须用重要度采样率加权,除了可以对上式等号右侧直接加权之外,还有更好的方法,就是加多一项
,这一项被称为控制变量。最后该n步回报的off - policy策略可以定义成:

在这个方法中,如果,则它不会使得目标为0并导致估计值收缩,而是使得目标和估计值一样,因而不会带来任何变化。重要度采样率为0意味着忽略样本,所以让估计值保持不变是合理的。
n步Tree Backup算法
如下图所示:
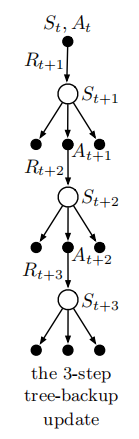
包含两个采样动作和
,在MC,TD中,这个图就是一条分支,直到终止状态。不同点在于这里只采样有限步,用估计的价值函数替代后续的采样回报(BootStrapping)。这里有采样,但是也包含没有采样到的动作价值函数(图中的左右节点)。没有采样到的动作节点叫做叶子节点。(所谓叶子节点就是没有子节点的节点,在状态
的时候,一个动作都没选择,对应它的子节点都是叶子节点)
目标更新
一般情况下,会使用实际采样的序列这条分支(中间)来构造更新的目标。但是在tree backup更新中,不仅包含采样的动作序列,还需要考虑旁边的动作。类似于从叶子节点到根节点的一次回溯,叫做tree backup。
更新目标(父节点)是通过叶子节点的价值函数构造。这里首先给每一个叶子节点分配一个权重。这个权重是叶子节点对应动作在目标策略
下的概率。而更新时,就是以此概率作为权重的,所有的叶子节点的加权之和。对于第一层的叶子节点(
下面的两个叶子节点),权重是
。而对于该层的非叶子节点,也就是
,它发生的概率
用来给所有第2层的节点加权,以此类推。

对于每个叶子节点以及他们的加权权重如上图所示。对于单步tree backup算法,其回报与Expected Sarsa算法相同。对于,有

对于,也就是2步tree backup 算法,它的回报是
对于tree backup算法的n步回报的地柜定义的一般形式。即对于,有

n步tree backup算法的伪代码如下:
















 6882
6882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









