






A*算法,具体原理可参看已有的博客,下面是我觉得比较好的几个。
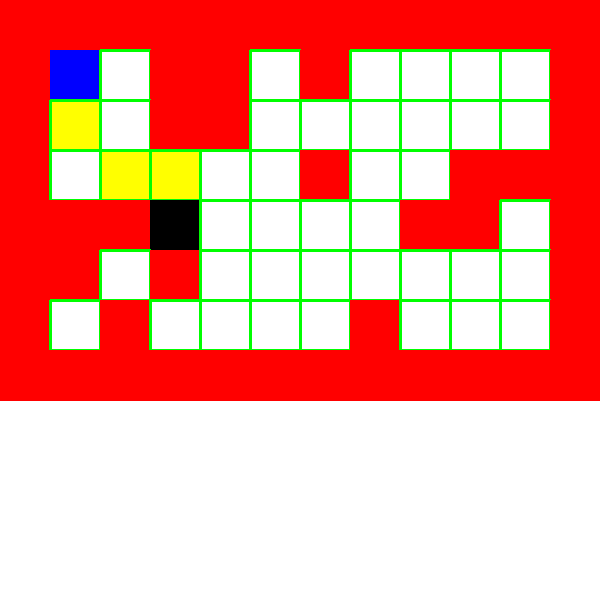
自己在github上找到了一个比较简单的用C++实现的版本(点击打开链接),自己在此基础上添加了opencv绘制简单图块,将结果可视化了,如下图。其中,红色为障碍块,白色绿边为自由空间,蓝色为起始点,黑色为目标点,规划的路径用黄色块表示,程序设定可斜对角穿行。
#include <iostream>
#include <stdlib.h>
#include <algorithm>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class CPoint
{
public:
CPoint(int x,int y):X(x),Y(y),G(0),H(0),F(0),m_parentPoint(NULL){ };
~CPoint();
int X,Y,G,H,F;
CPoint * m_parentPoint;
void CalF(){
F=G+H;
};
};
class CAStar
{
private:
int m_array[12][12];
static const int STEP = 10;
static const int OBLIQUE = 14;
typedef std::vector<CPoint*> POINTVEC;
POINTVEC m_openVec;
POINTVEC m_closeVec;
public:
CAStar(int array[][12])
{
for (int i=0;i<12;i++)
for(int j=0;j<12;j++)
m_array[i][j]=array[i][j];
}
CPoint* GetMinFPoint()
{
int idx=0,valueF=-9999;
for(int i=0; i < m_openVec.size(); ++i)
{
if(m_openVec[i]->F < valueF)
{
valueF = m_openVec[i]->F;
idx = i;
}
}
return m_openVec[idx];
}
bool RemoveFromOpenVec(CPoint* point)
{
for(POINTVEC::iterator it = m_openVec.begin(); it != m_openVec.end(); ++it)
{
if((*it)->X == point->X && (*it)->Y == point->Y)
{
m_openVec.erase(it);
return true;
}
}
return false;
}
bool canReach(int x, int y)
{
return 0 == m_array[x][y];
}
bool IsAccessiblePoint(CPoint* point, int x, int y, bool isIgnoreCorner)
{
if(!canReach(x, y) || isInCloseVec(x, y))
return false;
else
{
//可到达的点
if(abs(x - point->X) + abs(y - point->Y) == 1) // 左右上下点
return true;
else
{
if(canReach(abs(x - 1), y) && canReach(x, abs(y - 1))) // 对角点
return true;
else
return isIgnoreCorner; //墙的边角
}
}
}
std::vector<CPoint*> GetAdjacentPoints(CPoint* point, bool isIgnoreCorner)
{
POINTVEC adjacentPoints;
for(int x = point->X-1; x <= point->X+1; ++x)
for(int y = point->Y-1; y <= point->Y+1; ++y)
{
if(IsAccessiblePoint(point, x, y, isIgnoreCorner))
{
CPoint* tmpPoint = new CPoint(x, y);
adjacentPoints.push_back(tmpPoint);
}
}
return adjacentPoints;
}
bool isInOpenVec(int x, int y)
{
for(POINTVEC::iterator it = m_openVec.begin(); it != m_openVec.end(); ++it)
{
if((*it)->X == x && (*it)->Y == y)
return true;
}
return false;
}
bool isInCloseVec(int x, int y)
{
for(POINTVEC::iterator it = m_closeVec.begin(); it != m_closeVec.end(); ++it)
{
if((*it)->X == x && (*it)->Y == y)
return true;
}
return false;
}
void RefreshPoint(CPoint* tmpStart, CPoint* point)
{
int valueG = CalcG(tmpStart, point);
if(valueG < point->G)
{
point->m_parentPoint = tmpStart;
point->G = valueG;
point->CalF();
}
}
void NotFoundPoint(CPoint* tmpStart, CPoint* end, CPoint* point)
{
point->m_parentPoint = tmpStart;
point->G = CalcG(tmpStart, point);
point->G = CalcH(end, point);
point->CalF();
m_openVec.push_back(point);
}
int CalcG(CPoint* start, CPoint* point)
{
int G = (abs(point->X - start->X) + abs(point->Y - start->Y)) == 2 ? STEP : OBLIQUE;
int parentG = point->m_parentPoint != NULL ? point->m_parentPoint->G : 0;
return G + parentG;
}
int CalcH(CPoint* end, CPoint* point)
{
int step = abs(point->X - end->X) + abs(point->Y - end->Y);
return STEP * step;
}
// 搜索路径
CPoint* FindPath(CPoint* start, CPoint* end, bool isIgnoreCorner)
{
m_openVec.push_back(start);
while(0 != m_openVec.size())
{
CPoint* tmpStart = GetMinFPoint(); // 获取F值最小的点
RemoveFromOpenVec(tmpStart);
m_closeVec.push_back(tmpStart);
POINTVEC adjacentPoints = GetAdjacentPoints(tmpStart, isIgnoreCorner);
for(POINTVEC::iterator it=adjacentPoints.begin(); it != adjacentPoints.end(); ++it)
{
CPoint* point = *it;
if(isInOpenVec(point->X, point->Y)) // 在开启列表
RefreshPoint(tmpStart, point);
//else if(inCloseVec(point))
//{
// 检查节点的g值,如果新计算得到的路径开销比该g值低,那么要重新打开该节点(即重新放入OPEN集)
//}
else
NotFoundPoint(tmpStart, end, point);
}
if(isInOpenVec(end->X, end->Y)) // 目标点已经在开启列表中
{
for(int i=0; i < m_openVec.size(); ++i)
{
if(end->X == m_openVec[i]->X && end->Y == m_openVec[i]->Y)
return m_openVec[i];
}
}
}
return end;
}
};
int main()
{
int start_point_x=1;
int start_point_y=1;
int goal_point_x=4;
int goal_point_y=3;
int array[12][12] =
{ // 0 1 2 3 4 5 6 7 8 9 10 11
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1},// 0
{ 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 0, 1},// 1
{ 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1},// 2
{ 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 1},// 3
{ 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1},// 4
{ 1, 1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 1},// 5
{ 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 1},// 6
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1} // 7
};
CAStar* pAStar = new CAStar(array);
if(array[start_point_x][start_point_y]||array[goal_point_x][goal_point_y])
{
cout<<"start point or goal point set error!!!"<<endl;
return 0;
}
CPoint* start = new CPoint(start_point_x, start_point_y);
CPoint* end = new CPoint(goal_point_x, goal_point_y);
CPoint* point = pAStar->FindPath(start, end, false);
Rect rect;
Point left_up,right_bottom;
Mat img(600,600,CV_8UC3,Scalar(255,255,255));
namedWindow("Test");
while(point != NULL)
{
left_up.x = point->Y*50; //存储数组的列(point->Y)对应矩形的x轴,一个格大小50像素
left_up.y = point->X*50;
right_bottom.x = left_up.x+50;
right_bottom.y = left_up.y+50;
rectangle(img,left_up,right_bottom,Scalar(0,255,255),CV_FILLED,8,0);//path yellow(full)
std::cout << "(" << point->X << "," << point->Y << ");" << std::endl;
point = point->m_parentPoint;
}
for(int i=0;i<8;i++)
{
for(int j=0;j<12;j++)
{
left_up.x = j*50; //存储数组的列(j)对应矩形的x轴
left_up.y = i*50;
right_bottom.x = left_up.x+50;
right_bottom.y = left_up.y+50;
if(array[i][j])
{
rectangle(img,left_up,right_bottom,Scalar(0,0,255),CV_FILLED,8,0);//obstacles red
}
else
{
if(i==start_point_x&&j==start_point_y)
rectangle(img,left_up,right_bottom,Scalar(255,0,0),CV_FILLED,8,0);//start point blue(full)
else if(i==goal_point_x&&j==goal_point_y)
rectangle(img,left_up,right_bottom,Scalar(0,0,0),CV_FILLED,8,0);//goal point black(full)
else
rectangle(img,left_up,right_bottom,Scalar(0,255,0),2,8,0);//free white content,green edge
}
}
}
imshow("Test",img); //窗口中显示图像
waitKey(0);
return 0;
}引用:https://github.com/yangxt225/AStar/blob/master/myAstar.cpp















 2239
2239











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









