




 本文详细介绍使用Vivado 2017.4在Zynq开发板上进行Eth测试的步骤,涵盖工程创建、配置、综合、生成bit文件及SDK应用开发,特别针对ksz9031 PHY芯片的速度检测进行了代码修改。
本文详细介绍使用Vivado 2017.4在Zynq开发板上进行Eth测试的步骤,涵盖工程创建、配置、综合、生成bit文件及SDK应用开发,特别针对ksz9031 PHY芯片的速度检测进行了代码修改。
开发板环境:vivado 2017.4 ,开发板型号xc7z010clg400-1,这个工程主要是进行eth测试
链接:https://pan.baidu.com/s/1dUm68xhKjobq1C6st9Zn3A
提取码:o868
step1 新建一个vivado工程
step 2 导入zynq配置文件
点击Create Block Design
点击OK
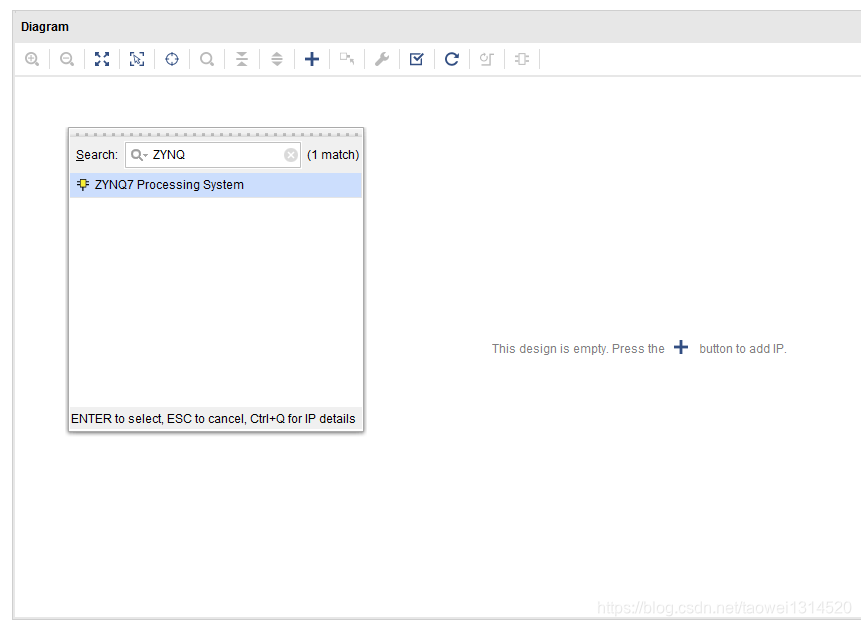
调用zynq核
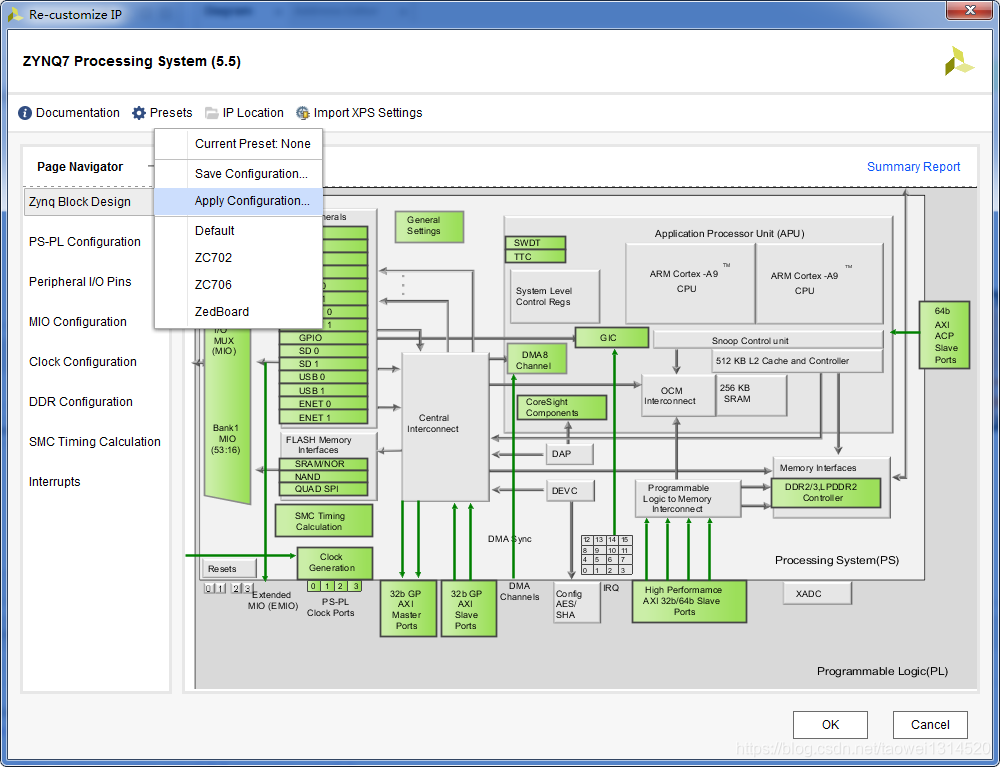
双击zynq核导入配置文件
选择Apply Configuration导入配置文件
选择MYIR.tcl文件,点击OK
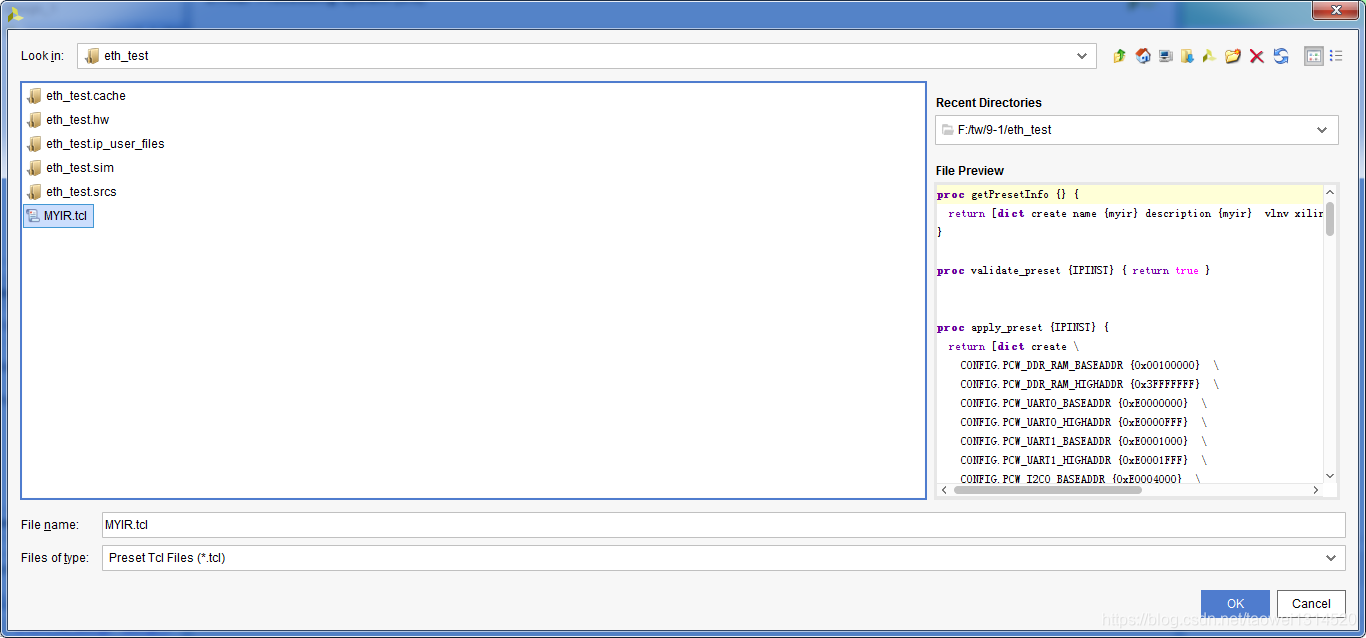
点击OK
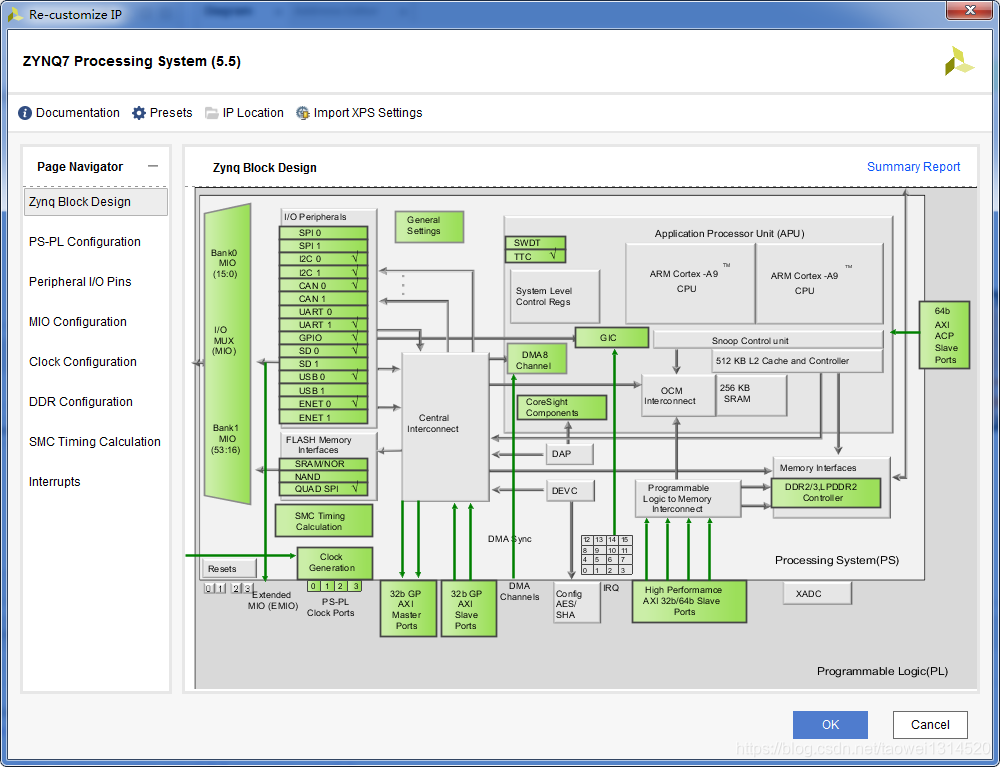
配置完成后,如下图所示
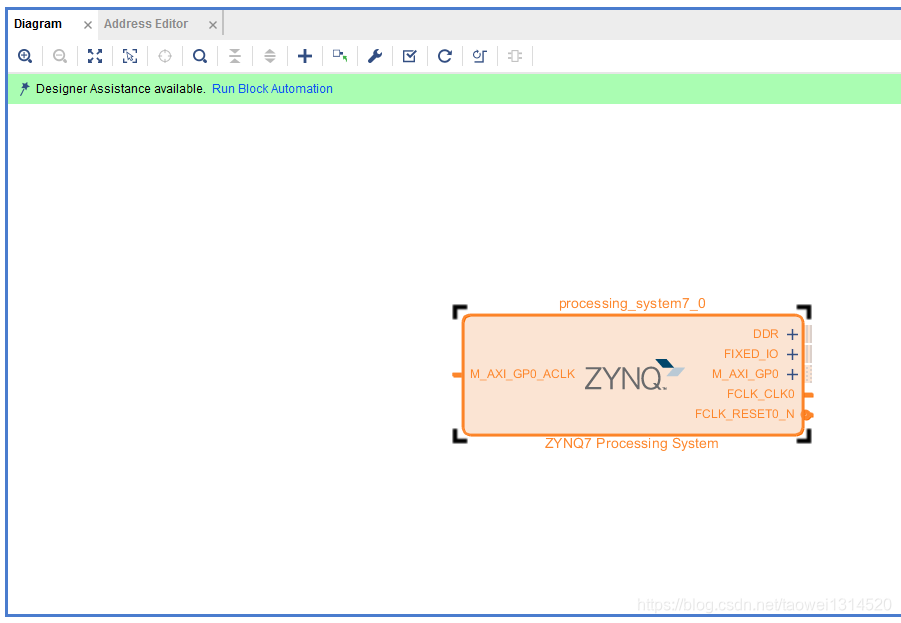
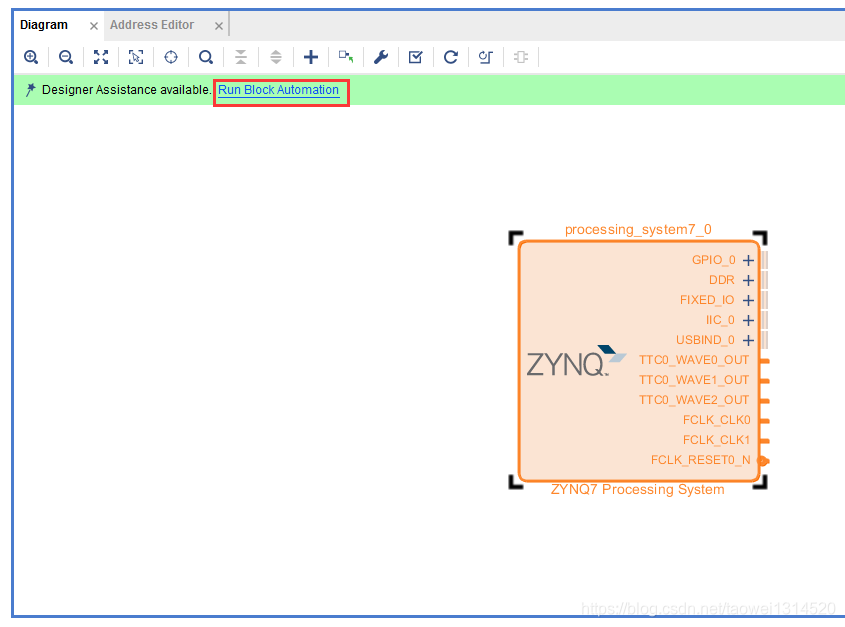
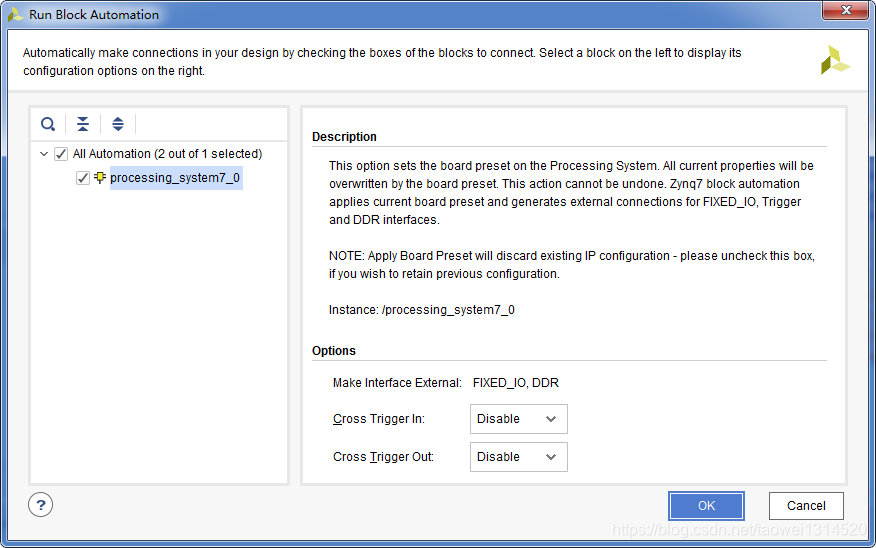
点击Run Block Automation 引出zynq管脚
点击OK
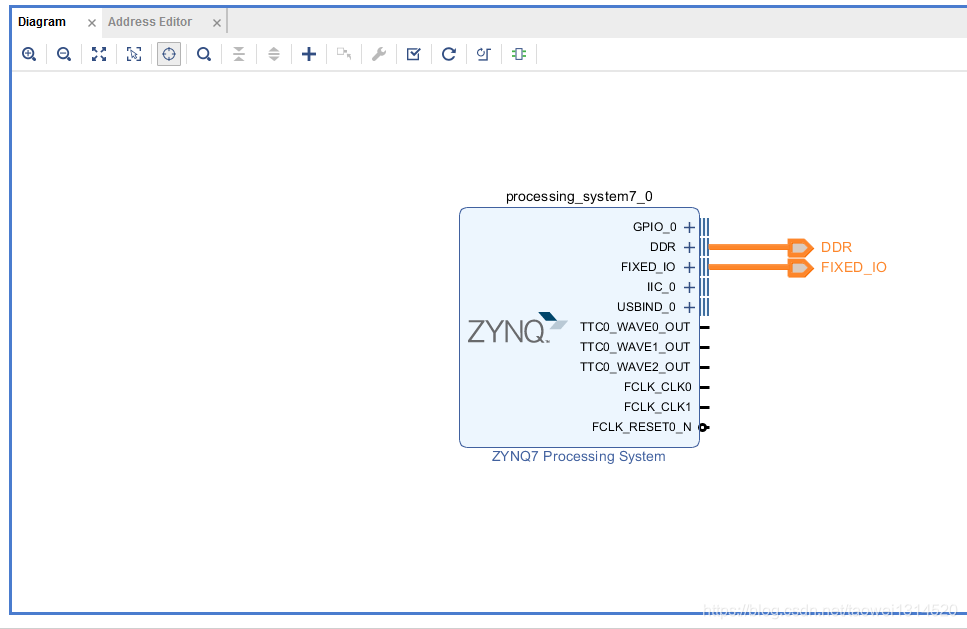
引出的管脚,如下图所示
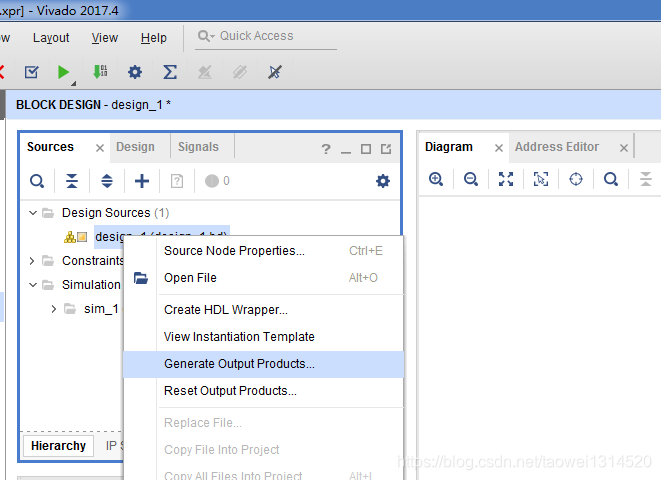
step 3 综合
右击design_1-->Generate Output Products
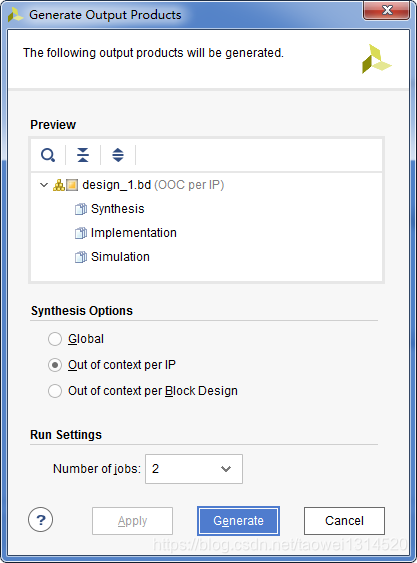
点击Generate
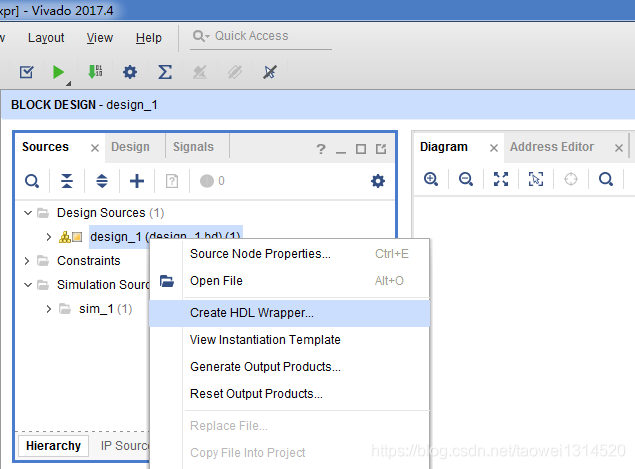
step 4 生成顶层文件
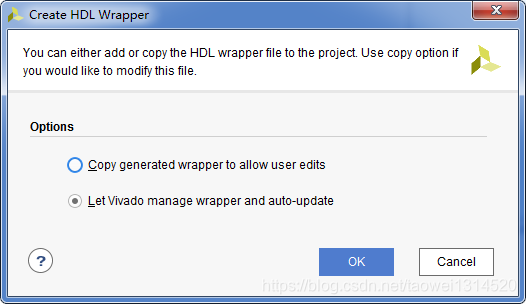
右击design_1-->Create HDL Wrapper 生成顶层文件
点击OK
step 5 生成bit文件
点击工具栏上的Generate Bitstream图标生成bit文件
点击Yes
点击OK
生成完成后,点击Cancel
step 6 导出硬件配置并打开SDK
File--> Export-->Export Hardware 导出硬件配置
点击OK
点击File-->Launch SDK打开SDK
点击OK
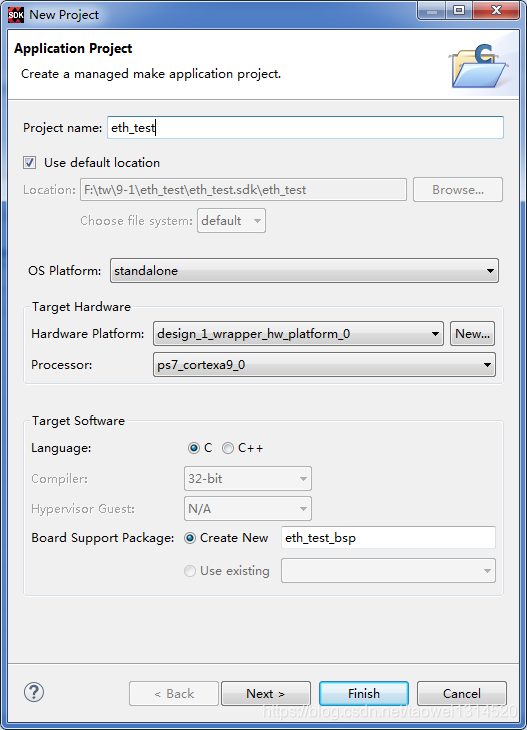
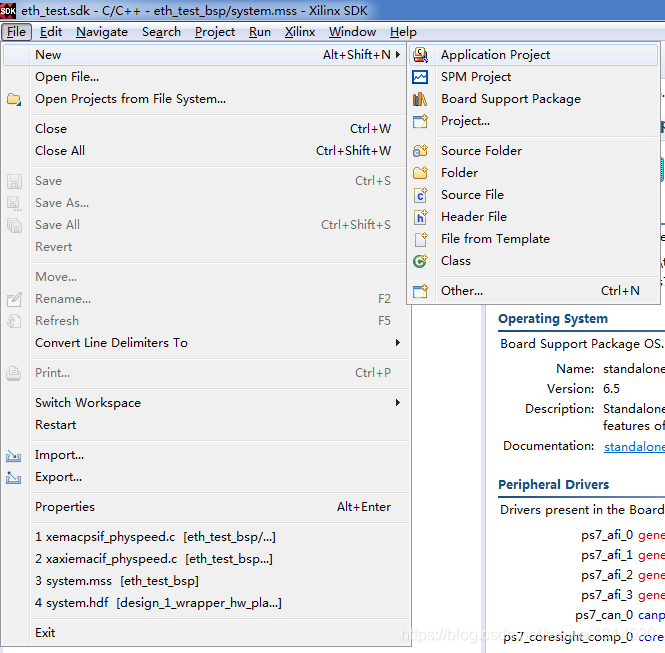
step 7 新建eth_test工程
File-->Application Project
新建eth_test工程,点击Next
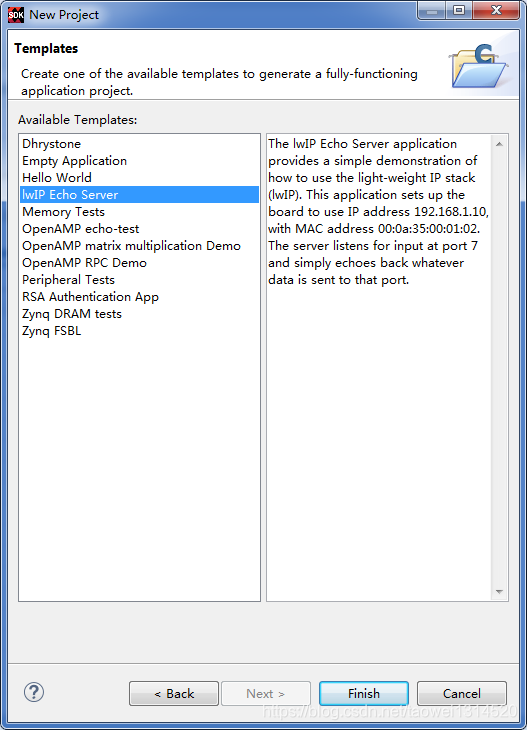
选择lwip模板,点击Finish
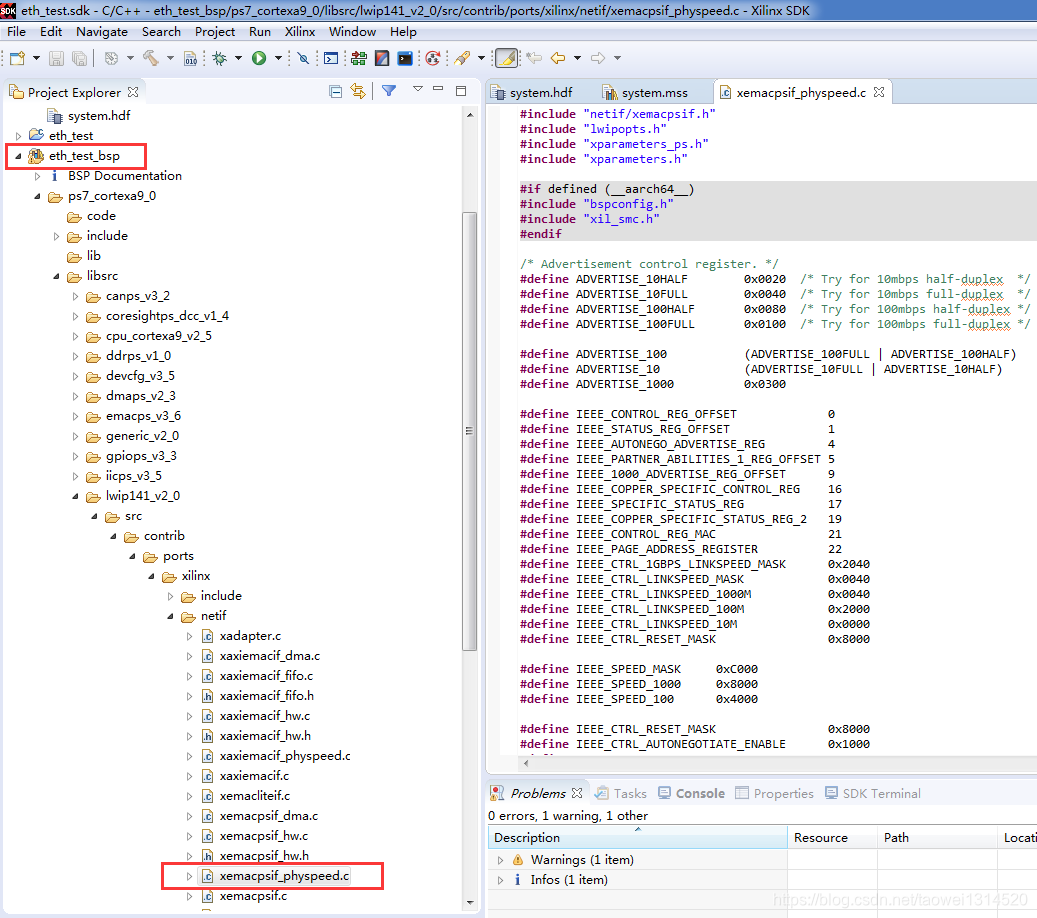
打开eth_test_bsp路径下的xemacpsif_physpeed.c文件(ksz9031需要改这里,其它的phy芯片有的新建lwip就可以直接用)
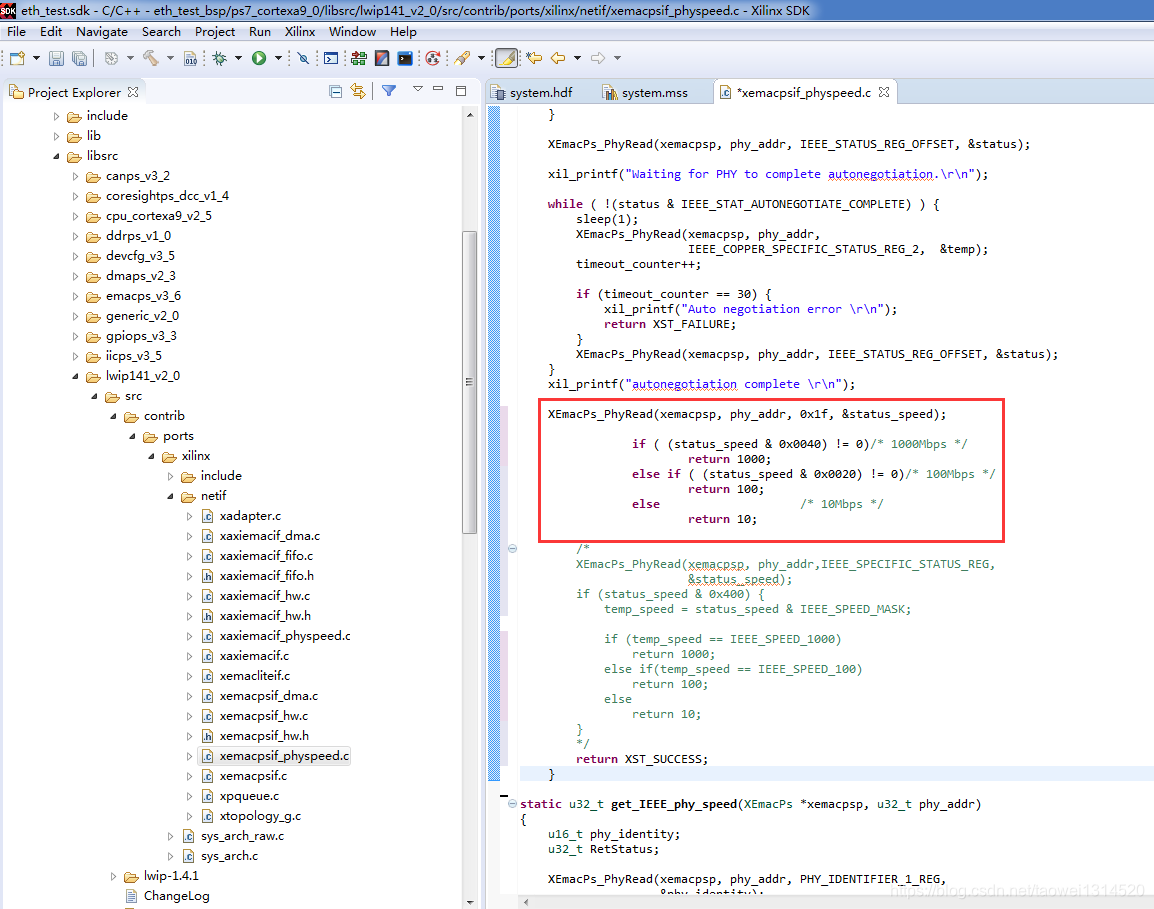
找到get_Marvell_phy_speed这个函数更改函数末尾读取phy速度部分
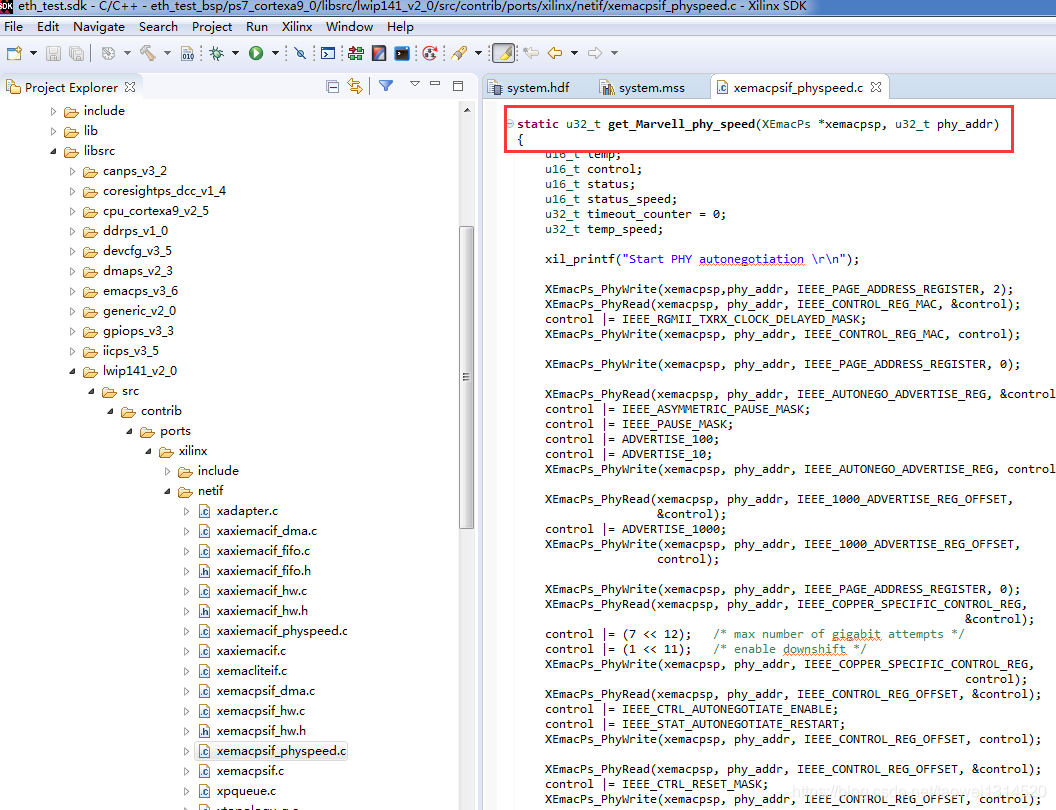
将函数末尾改为这样,点击保存
点击xaxiemacif_physpeed.c文件
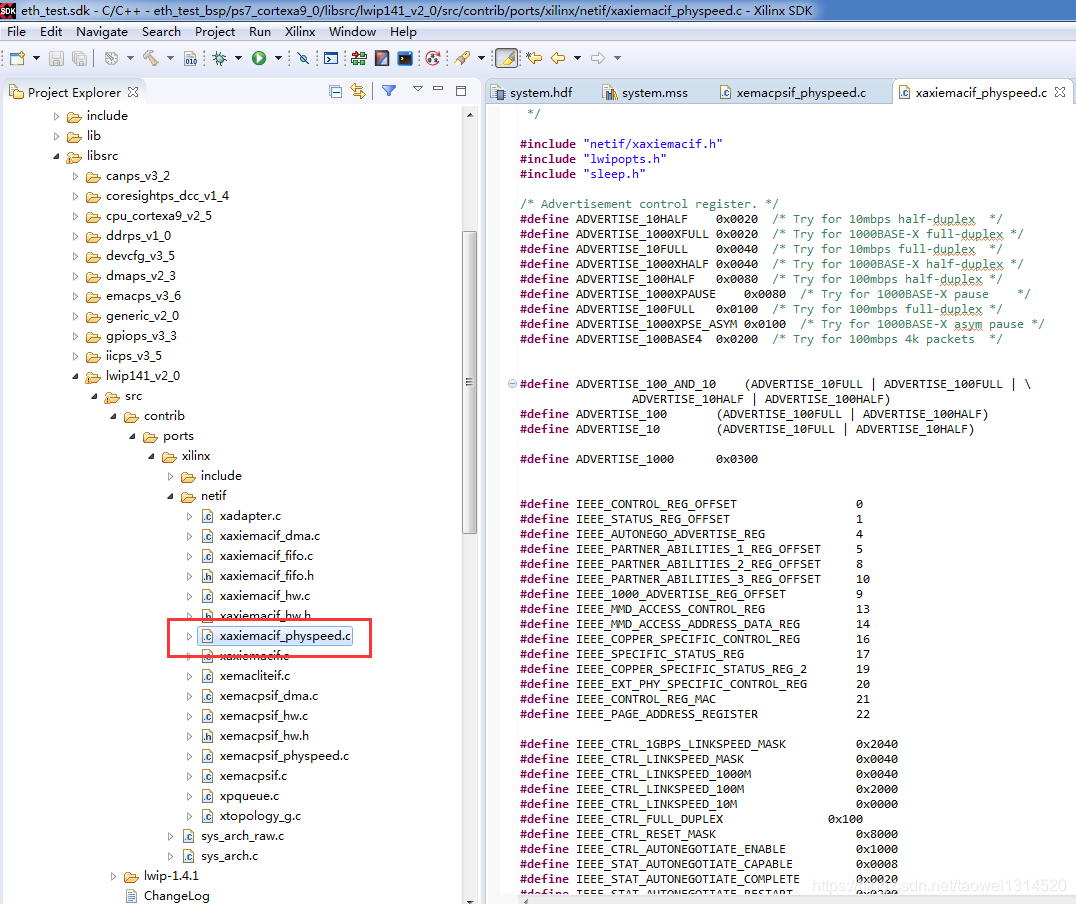
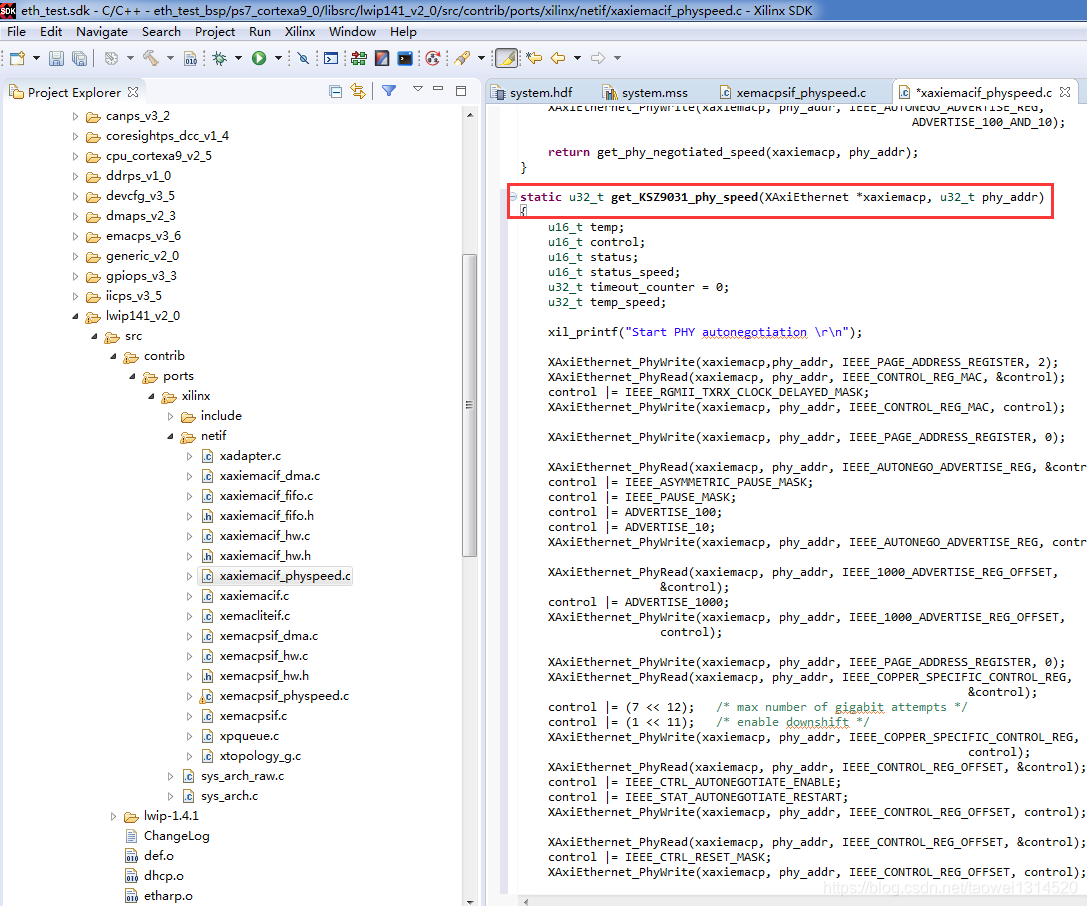
然后将这段get_KSZ9031_phy_speed一整个程序段添加进去,点击保存
static u32_t get_KSZ9031_phy_speed(XAxiEthernet *xaxiemacp, u32_t phy_addr)
{
u16_t temp;
u16_t control;
u16_t status;
u16_t status_speed;
u32_t timeout_counter = 0;
u32_t temp_speed;
xil_printf("Start PHY autonegotiation \r\n");
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 2);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_MAC, &control);
control |= IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_MAC, control);
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, &control);
control |= IEEE_ASYMMETRIC_PAUSE_MASK;
control |= IEEE_PAUSE_MASK;
control |= ADVERTISE_100;
control |= ADVERTISE_10;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control |= ADVERTISE_1000;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control |= (7 << 12); /* max number of gigabit attempts */
control |= (1 << 11); /* enable downshift */
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_RESET_MASK;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while (1) {
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
if (control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
xil_printf("Waiting for PHY to complete autonegotiation.\r\n");
while ( !(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE) ) {
sleep(1);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr,
IEEE_COPPER_SPECIFIC_STATUS_REG_2, &temp);
timeout_counter++;
if (timeout_counter == 30) {
xil_printf("Auto negotiation error \r\n");
return XST_FAILURE;
}
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
}
xil_printf("autonegotiation complete \r\n");
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, 0x1f, &status_speed);
if ( (status_speed & 0x0040) != 0)/* 1000Mbps */
return 1000;
else if ( (status_speed & 0x0020) != 0)/* 100Mbps */
return 100;
else /* 10Mbps */
return 10;
/*
XAxiEthernet_PhyRead(xaxiemacp, phy_addr,IEEE_SPECIFIC_STATUS_REG,
&status_speed);
if (status_speed & 0x400) {
temp_speed = status_speed & IEEE_SPEED_MASK;
if (temp_speed == IEEE_SPEED_1000)
return 1000;
else if(temp_speed == IEEE_SPEED_100)
return 100;
else
return 10;
}
*/
return XST_SUCCESS;
}
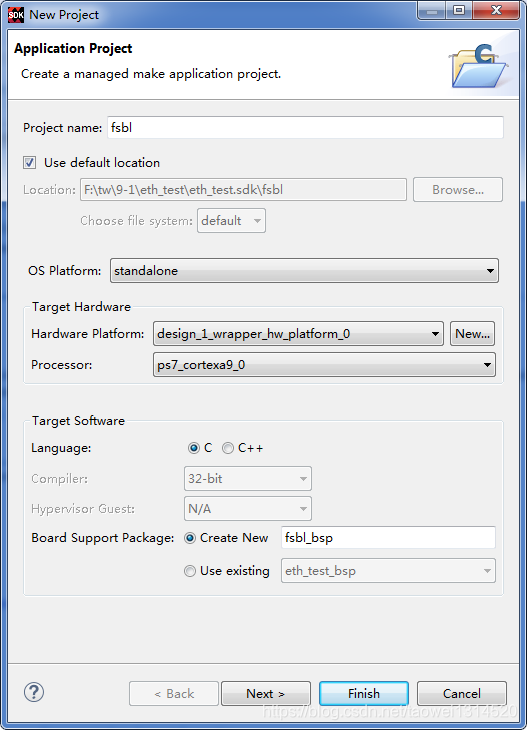
step 7 新建fsbl
File-->Application Project
新建fsbl,点击Next
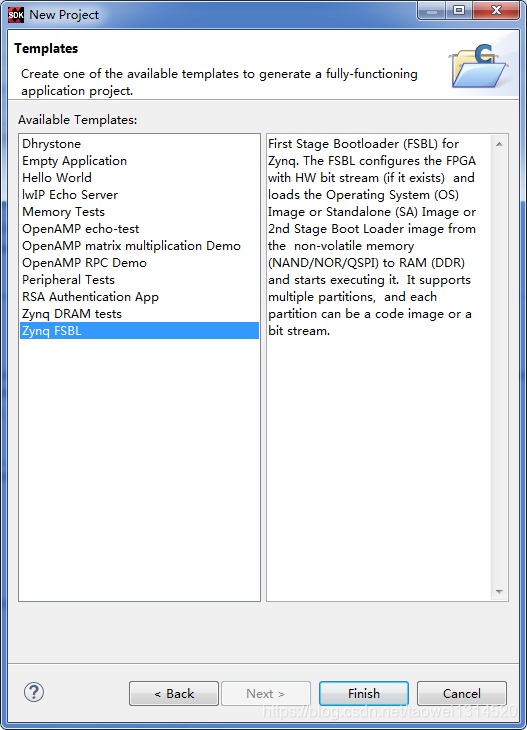
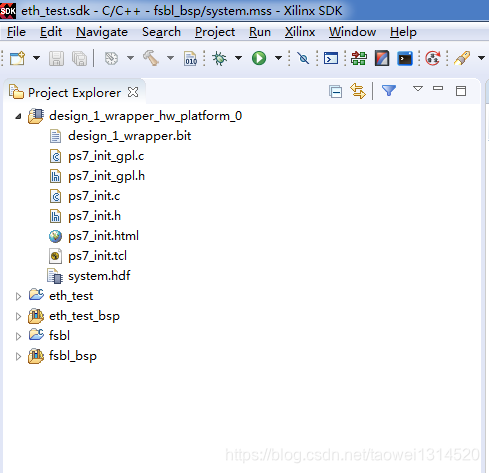
选择Zynq FSBL,点击Finish
生成的fsbl
step 8 生成BOOT.bin文件
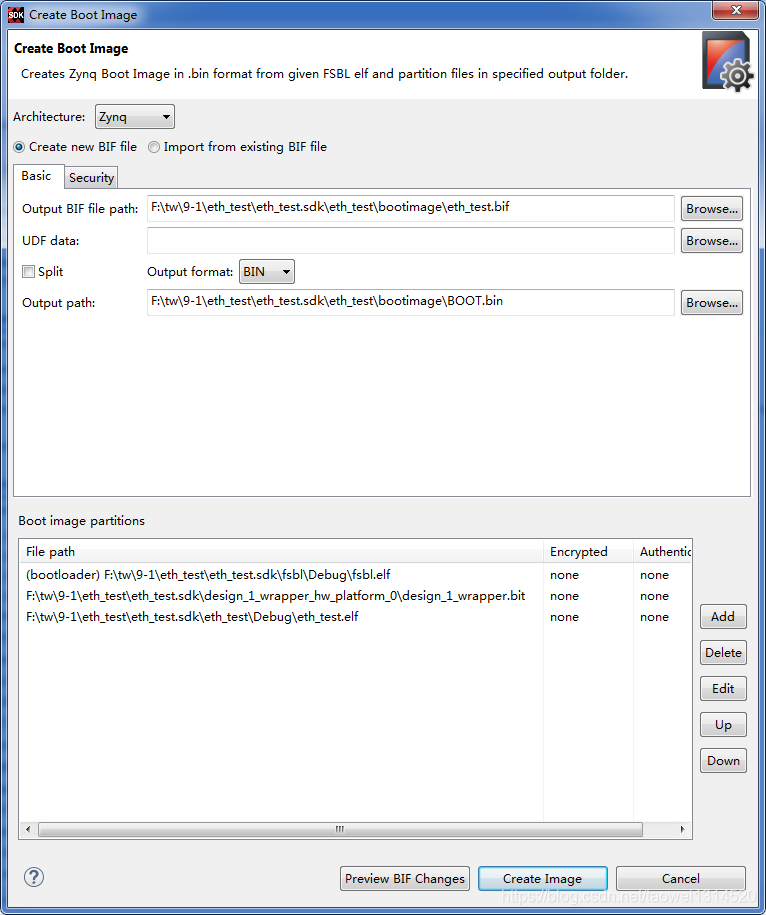
右击eth_test--->Create Boot Image 生成BOOT.bin文件
点击 Create Image 生成BOOT.bin文件,将BOOT.bin文件拷贝到SD放到开发板上运行

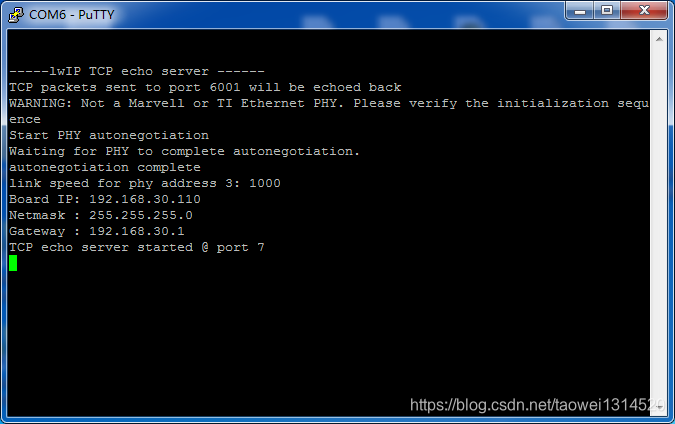
运行裸机程序开发板连接到路由器会自动分配一个IP地址
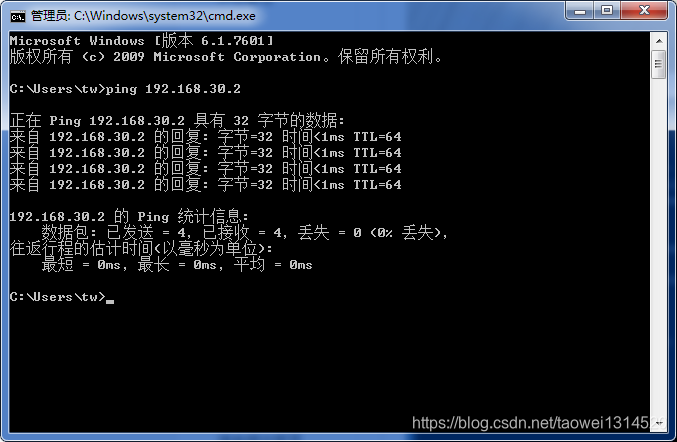
直接ping同一网段不同的的IP地址可以ping通


















 2158
2158





 到【灌水乐园】发言
到【灌水乐园】发言







