







 本文介绍了计算机视觉中用于检测几何图形的霍夫变换,从直线检测开始,逐步阐述到圆和椭圆的检测。霍夫变换通过将图像中点集映射到参数空间,实现图形检测和定位。文章详细解释了霍夫变换的原理,包括直线的极坐标表示和圆的霍夫变换,并探讨了广义霍夫变换的概念,以及如何处理任意形状的图形。
本文介绍了计算机视觉中用于检测几何图形的霍夫变换,从直线检测开始,逐步阐述到圆和椭圆的检测。霍夫变换通过将图像中点集映射到参数空间,实现图形检测和定位。文章详细解释了霍夫变换的原理,包括直线的极坐标表示和圆的霍夫变换,并探讨了广义霍夫变换的概念,以及如何处理任意形状的图形。
计算机视觉中经常需要识别或者定位某些几何图形,比如直线、圆、椭圆,还有其他一些图形。检测直线的霍夫变换提供了在图像中寻找直线的一种算法,是最简单的一种情形,后来发展到检测圆、椭圆、还有一般图形的霍夫变换。
其核心思想是把图像中属于某种图形的点集(二维)映射到一个点(可以是高维)上,这个点记录了点集中点的数目,使得程序通过搜索峰值找到该点,这个点就是后面要说到的图形的参数,而该参数的范围就叫做参数空间。
霍夫变换不仅能够识别出图像中有无需要检测的图形,而且能够定位到该图像(包括位置、角度等),下面将通过分析从简单到复杂的霍夫变换,导出霍夫变换的实质。
(1)直线
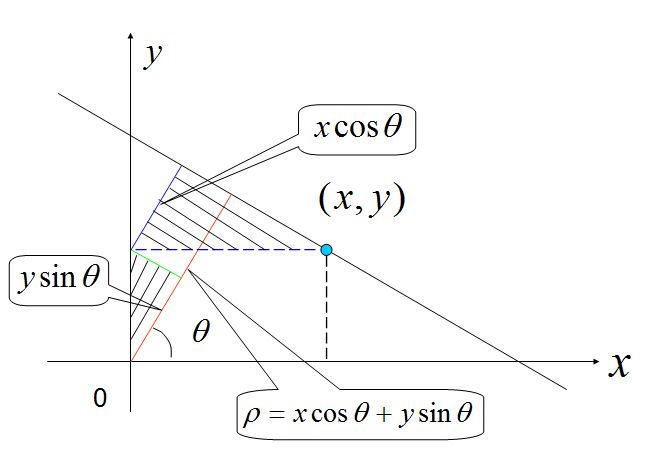
以直线检测为例,每个像素坐标点经过变换都变成都直线特质有贡献的统一度量,一个简单的例子如下:一条直线在图像中是一系列离散点的集合,通过一个直线的离散极坐标公式,可以表达出直线的离散点几何等式如下:
X *cos(theta) + y * sin(theta) = r
其中角度theta指r与X轴之间的夹角,r为到直线几何垂直距离。任何在直线上点,x, y都可以表达,其中 r, theta是常量。
检测直线的霍夫变换使用含极坐标参数的直线表示型式简称极坐标式(不是极坐标方程,因为还是在笛卡尔坐标下表示)

其中的两个参数的意义如下图:
两坐标之间的关系:
在直角坐标系和极坐标系的对应关系,点、直线在两个坐标系中是对偶关系。
即直角坐标系中的点是极坐标系中的线,直角坐标系中的线是极坐标系中的点。
图示为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 957
957

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









