







对于平面曲线,参数方法一般可以表示为:
在拟合时,需要选择一些基函数$B_{i}(t)$,使得:
比如使用幂基函数:
假如现在平面上已经有了一些点集(序号是顺序):
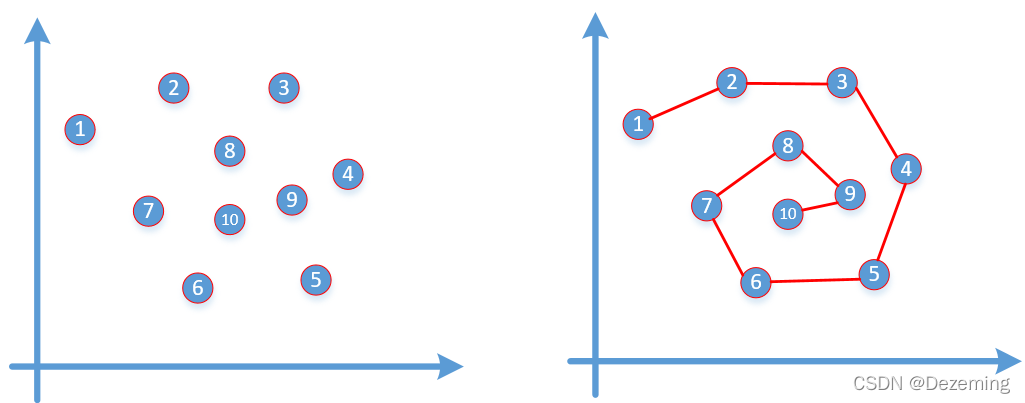
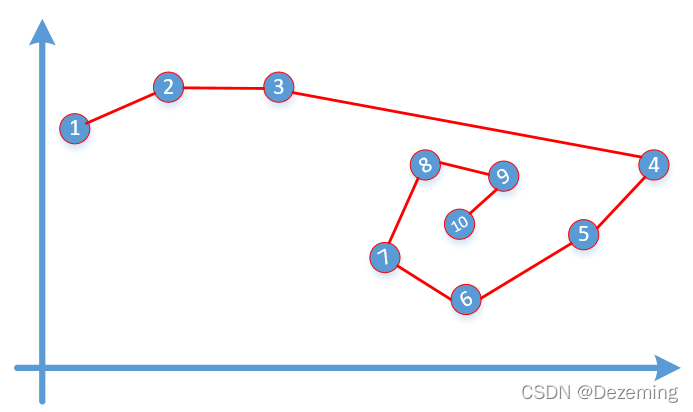
最简单和直白的方式是连起来,如上图右。但是这样不够平滑,我们一般会进行拟合。
拟合方法一般使用最小二乘法,可以将$x(t)$和$y(t)$分别进行拟合。对于$i\in [1,2,...,n]$:
我们需要确定 $t$ 的取值位置。比如令 $t_{i}$ 均匀地分布在$[0,1]$之间(分布在任意的$[a,b]$之间都可以):
但是这样往往不够细致,比如如果有两个点$p_{3}$和$p_{4}$距离比较远,那么$t_{3}$和$t_{4}$也应该要比较远:
因此可以根据两点距离除以总距离来生成不均匀的$t_{i}$:
\section{拟合方法}
当我们使用基函数时,可以写为一个矩阵形式:
令$m=n-1$,$\mathbf{A}$是一个$n\times n$的矩阵,可以直接求解线性系统,但是此时有可能$\mathbf{A}$是一个很接近奇异矩阵的矩阵,因此求逆会有很大的误差。
当$n<m$时,可以应用最小二乘法。我们计算拟合的误差函数:
对误差函数进行求导,令导数为$0$,得到:


















 492
492

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











